Gym-game
Basic Usage - Gymnasium Documentation (farama.org)
Sponsor @Farama-Foundation on GitHub Sponsors
火星着陆:
import gymnasium as gym env = gym.make("LunarLander-v2", render_mode="human") observation, info = env.reset(seed=42) for _ in range(1000): action = env.action_space.sample() # this is where you would insert your policy observation, reward, terminated, truncated, info = env.step(action) if terminated or truncated: observation, info = env.reset() env.close()
import gym env = gym.make("CartPole-v1") observation, info = env.reset(seed=42) for _ in range(1000): action = env.action_space.sample() observation, reward, terminated, truncated, info = env.step(action) if terminated or truncated: observation, info = env.reset() env.close()
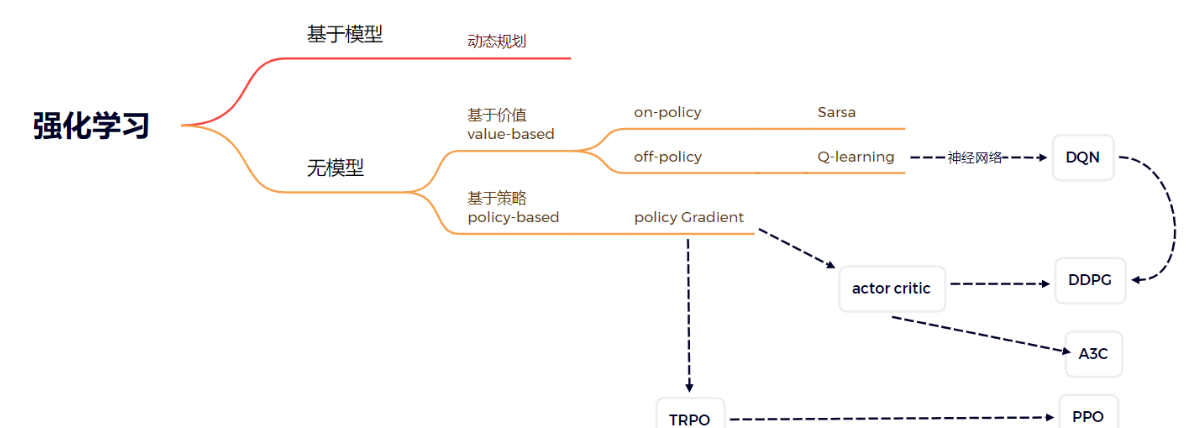
强化学习:


import numpy as np import torch import torch.nn as nn from torch.distributions import Categorical import gym #pip install box2d box2d-kengz --user device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") class Memory: def __init__(self): self.actions = [] self.states = [] self.logprobs = [] self.rewards = [] self.is_terminals = [] def clear_memory(self): del self.actions[:] del self.states[:] del self.logprobs[:] del self.rewards[:] del self.is_terminals[:] class ActorCritic(nn.Module): def __init__(self, state_dim, action_dim, n_latent_var): super(ActorCritic, self).__init__() # actor self.action_layer = nn.Sequential( nn.Linear(state_dim, n_latent_var), nn.Tanh(), nn.Linear(n_latent_var, n_latent_var), nn.Tanh(), nn.Linear(n_latent_var, action_dim), nn.Softmax(dim=-1) ) # critic self.value_layer = nn.Sequential( nn.Linear(state_dim, n_latent_var), nn.Tanh(), nn.Linear(n_latent_var, n_latent_var), nn.Tanh(), nn.Linear(n_latent_var, 1) ) def forward(self): raise NotImplementedError def act(self, state, memory): #state = torch.from_numpy(state).float().to(device) #lst=state[0] state_array=np.array(state) state = torch.from_numpy(state_array).float().to(device) #state=torch.unsqueeze(state,1) state=state.view(8,-1) action_probs = self.action_layer(state) dist = Categorical(action_probs)#按照给定的概率分布来进行采样 action = dist.sample() memory.states.append(state) memory.actions.append(action) memory.logprobs.append(dist.log_prob(action)) return action.item() def evaluate(self, state, action): action_probs = self.action_layer(state) dist = Categorical(action_probs) action_logprobs = dist.log_prob(action) dist_entropy = dist.entropy() state_value = self.value_layer(state) return action_logprobs, torch.squeeze(state_value), dist_entropy class PPO: def __init__(self, state_dim, action_dim, n_latent_var, lr, betas, gamma, K_epochs, eps_clip): self.lr = lr self.betas = betas self.gamma = gamma self.eps_clip = eps_clip self.K_epochs = K_epochs self.policy = ActorCritic(state_dim, action_dim, n_latent_var).to(device) self.optimizer = torch.optim.Adam(self.policy.parameters(), lr=lr, betas=betas) self.policy_old = ActorCritic(state_dim, action_dim, n_latent_var).to(device) self.policy_old.load_state_dict(self.policy.state_dict()) self.MseLoss = nn.MSELoss() def update(self, memory): # Monte Carlo estimate of state rewards: rewards = [] discounted_reward = 0 for reward, is_terminal in zip(reversed(memory.rewards), reversed(memory.is_terminals)): if is_terminal: discounted_reward = 0 discounted_reward = reward + (self.gamma * discounted_reward) rewards.insert(0, discounted_reward) # Normalizing the rewards: rewards = torch.tensor(rewards, dtype=torch.float32).to(device) rewards = (rewards - rewards.mean()) / (rewards.std() + 1e-5) # convert list to tensor old_states = torch.stack(memory.states).to(device).detach() old_actions = torch.stack(memory.actions).to(device).detach() old_logprobs = torch.stack(memory.logprobs).to(device).detach() # Optimize policy for K epochs: for _ in range(self.K_epochs): # Evaluating old actions and values : logprobs, state_values, dist_entropy = self.policy.evaluate(old_states, old_actions) # Finding the ratio (pi_theta / pi_theta__old): ratios = torch.exp(logprobs - old_logprobs.detach()) # Finding Surrogate Loss: advantages = rewards - state_values.detach() surr1 = ratios * advantages surr2 = torch.clamp(ratios, 1-self.eps_clip, 1+self.eps_clip) * advantages loss = -torch.min(surr1, surr2) + 0.5*self.MseLoss(state_values, rewards) - 0.01*dist_entropy # take gradient step self.optimizer.zero_grad() loss.mean().backward() self.optimizer.step() # Copy new weights into old policy: self.policy_old.load_state_dict(self.policy.state_dict()) def main(): ############## Hyperparameters ############## env_name = "LunarLander-v2" # creating environment env = gym.make(env_name) state_dim = env.observation_space.shape[0] action_dim = 4 render = False solved_reward = 230 # stop training if avg_reward > solved_reward log_interval = 20 # print avg reward in the interval max_episodes = 50000 # max training episodes max_timesteps = 300 # max timesteps in one episode n_latent_var = 64 # number of variables in hidden layer update_timestep = 2000 # update policy every n timesteps lr = 0.002 betas = (0.9, 0.999) gamma = 0.99 # discount factor K_epochs = 4 # update policy for K epochs eps_clip = 0.2 # clip parameter for PPO random_seed = None ############################################# if random_seed: torch.manual_seed(random_seed) env.seed(random_seed) memory = Memory() ppo = PPO(state_dim, action_dim, n_latent_var, lr, betas, gamma, K_epochs, eps_clip) #print(lr,betas) # logging variables running_reward = 0 avg_length = 0 timestep = 0 # training loop for i_episode in range(1, max_episodes+1): state = env.reset()#初始化(重新玩) for t in range(max_timesteps): timestep += 1 # Running policy_old: lst = state[0] action = ppo.policy_old.act(lst, memory) #state, reward, done, _ = env.step(action)#得到(新的状态,奖励,是否终止,额外的调试信息) result = env.step(action) state = result[0] # 新的状态 reward = result[1] # 奖励 done = result[2] # 是否终止 debug_info = result[3] # 额外的调试信息 # Saving reward and is_terminal: memory.rewards.append(reward) memory.is_terminals.append(done) # update if its time if timestep % update_timestep == 0: ppo.update(memory) memory.clear_memory() timestep = 0 running_reward += reward if render: env.render() if done: break avg_length += t # stop training if avg_reward > solved_reward if running_reward > (log_interval*solved_reward): print("########## Solved! ##########") torch.save(ppo.policy.state_dict(), './PPO_{}.pth'.format(env_name)) break # logging if i_episode % log_interval == 0: avg_length = int(avg_length/log_interval) running_reward = int((running_reward/log_interval)) print('Episode {} \t avg length: {} \t reward: {}'.format(i_episode, avg_length, running_reward)) running_reward = 0 avg_length = 0 if __name__ == '__main__': main()
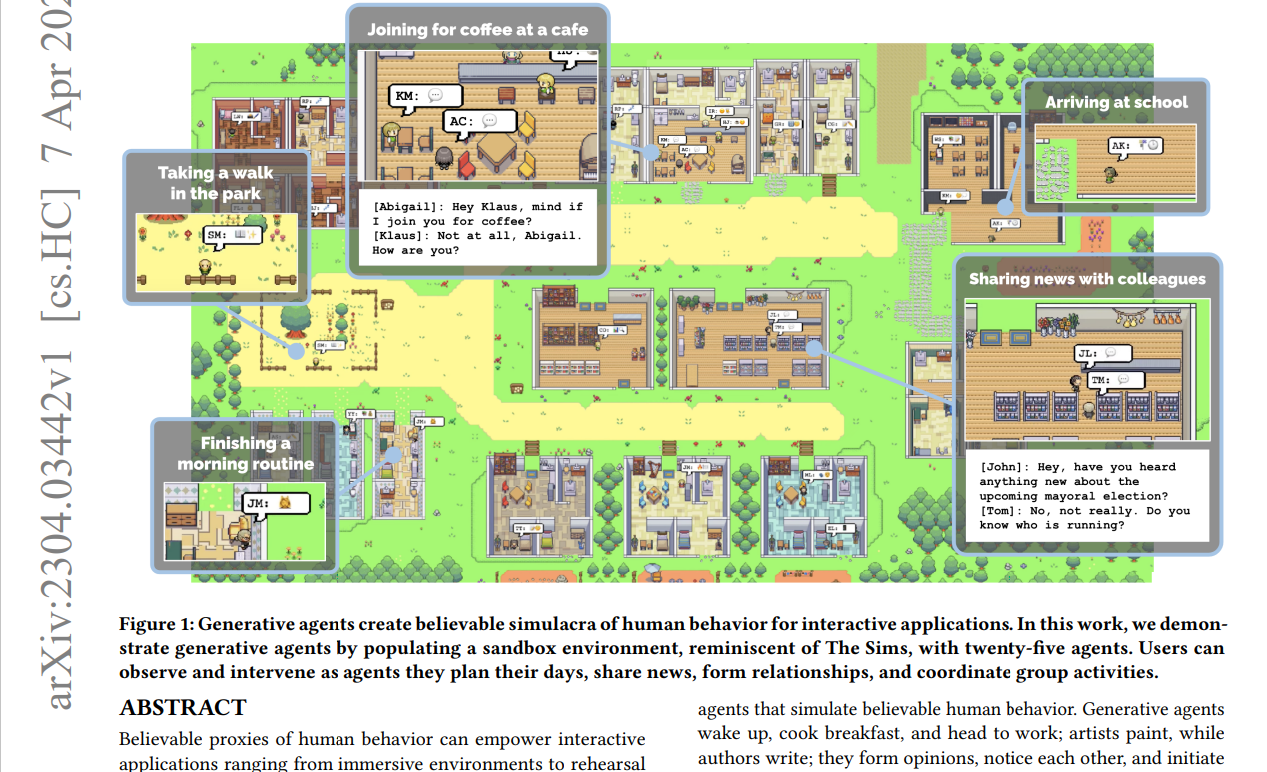
2304.03442
agent:智能体,也就是采取行为的主体
reward:环境对智能体action做出的奖励
action:智能体选择的行为
observation:观测值,也就是智能体做出action后环境所达到的新的状态
,Best Wish 不负年华

 浙公网安备 33010602011771号
浙公网安备 33010602011771号