低速前碰开发
为实现车辆在10km/h的速度下,当检测到前方有障碍物(车)的同时,能够给与驾驶员报警提示,并且在碰撞发生前,自主响应刹车系统避免碰撞的发生。
尝试开发低速前碰功能。
确认所需求的输入输出信号。
输入信号:ABS输入当前车速信息,前向超声波雷达输入前方障碍物的距离等信息
输出信号:输出报警声音信息,输出制动所需要的制动压力
超声波雷达的工作情况:
采用的是4.5m探测距离的雷达,带有主机,通过主机发送探测命令给雷达后,雷达执行探测完毕才会将探测的结果通过I/O端口反馈给主机。
主机探测命令的起效方式?命令信号周期?命令发送至雷达的传输时间?
雷达探测时间?雷达将探测结果数据传回主机时间?
主机将雷达的数据通过CAN按照周期20ms传出?
主机应该是不断发探测命令,传输时间加上雷达探测时间就是数据的更新时间,但是CAN的周期时间为20ms,则只有更新数据后才改变CAN数据,故而17ms,34ms是更新时间?
如果主机周期短,那多余的数据如何处理?
如果主机周期长,也有问题。
具体功能描述:
当汽车在10km/h(TBD)以下的速度行驶时,通过前向超声波雷达检测前方是否存在障碍物。
当检测到障碍物的同时,把距离信息输出,计算此时的速度与距离之间的关系,可以得出此时是否需要采取措施,诸如报警、制动。
预定汽车能够在制动措施前提前报警1s(TBD),若在报警时间内驾驶员未采取减速措施,则需要自主执行制动功能,制动后刹停距离障碍物的安全距离在30cm~50cm之间。
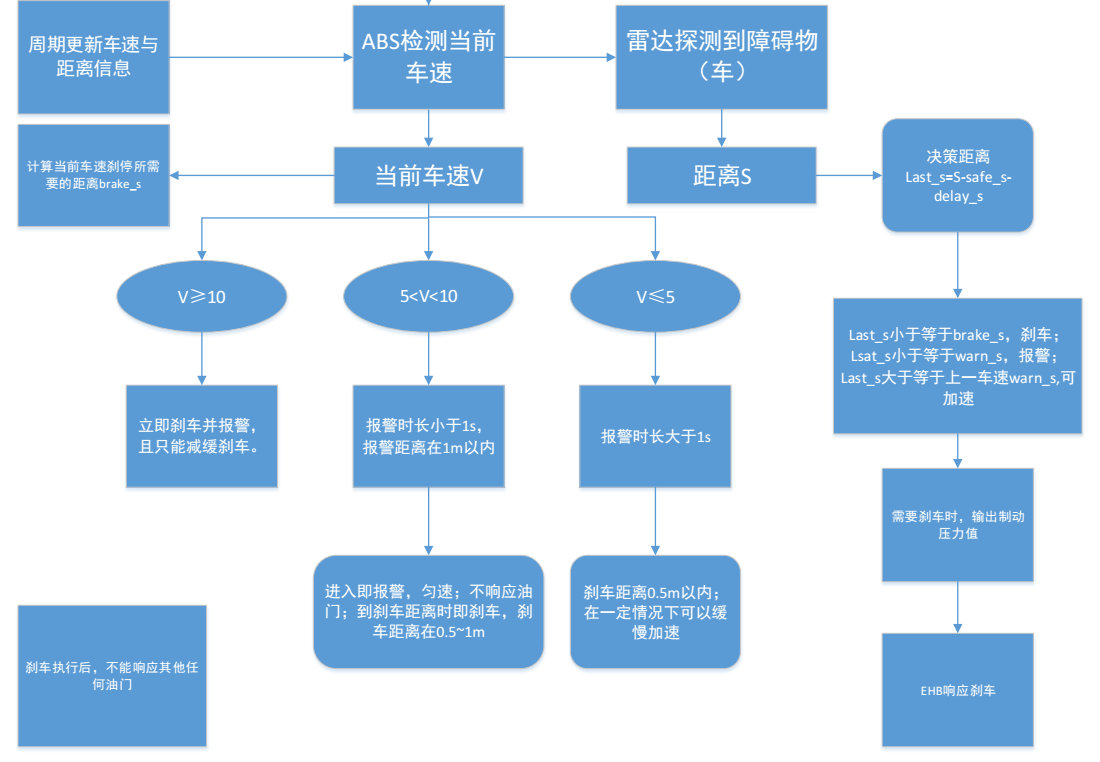
控制策略:
相关信号信息:输入的障碍物距离信息distance,安全距离safe_s,延迟时间delay_t,报警距离warn_s。
每时每刻获得的距离信息减去安全距离以及延迟时间内车走过的距离,计算得到剩余策略距离last_s=distance-safe_s-v*delay_t。
通过对比剩余策略距离和刹车距离brake_s来确认是否执行刹车。
通过对比剩余策略距离和brake_s+warm_s的大小来决定报警。
当超声波雷达检测到障碍物的时刻,此时的车速情况暂且分为三类:
车速大于10km/h时,车速大于低速前碰的最大阈值,需要立即响应刹车并报警,并最终只能减缓碰撞不能刹停。
当车速大于5km/h并小于10km/h时,需求的刹车距离大于50cm,使得报警时间无法达到1s,则需要在检测到障碍物的同时立刻响应报警,当在剩余策略距离小于刹车距离时响应刹车,并给与平均3~4m/s²的减速度使车停在安全距离内。
当车速在5km/h的范围内时,刹车距离小于50cm,且能够报警1s以上,当在剩余策略距离小于刹车距离时响应刹车,给与的减速度预定为2m/s²,能够使车刹停。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号