


Pangolin学习
0.1. 资料
0.2. 使用说明
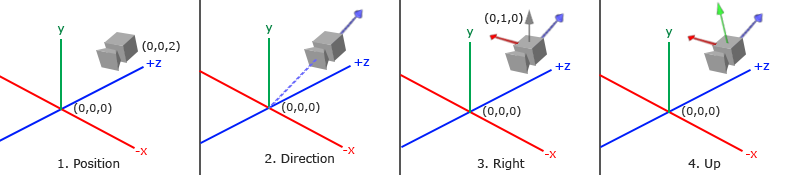
使用这个gluLookAt矩阵坐标观察矩阵可以很高效地把所有世界坐标变换为观察坐标LookAt矩阵
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
target_link_libraries(pangolin_test ${Pangolin_LIBRARIES})
Github 下有个example有一些例子,简单的参照着写,复杂的估计需要查opengl.
0.3. HelloPangolin
#include <iostream>
#include <pangolin/pangolin.h>
int main(int argc, char **argv)
{
//创建一个窗口
pangolin::CreateWindowAndBind("Main",640,480);
//启动深度测试
glEnable(GL_DEPTH_TEST);
// Define Projection and initial ModelView matrix
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(640,480,420,420,320,240,0.2,100),
//对应的是gluLookAt,摄像机位置,参考点位置,up vector(上向量)
pangolin::ModelViewLookAt(0,-10,0.1,0,0,0,pangolin::AxisNegY)
);
// Create Interactive View in window
pangolin::Handler3D handler(s_cam);
//setBounds 跟opengl的viewport 有关
//看SimpleDisplay中边界的设置就知道
pangolin::View &d_cam = pangolin::CreateDisplay().SetBounds(0.0,1.0,0.0,1.0,-640.0f/480.0f)
.SetHandler(&handler);
while(!pangolin::ShouldQuit())
{
// Clear screen and activate view to render into
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
// Render OpenGL Cube
// pangolin::glDrawColouredCube();\
//坐标轴的创建
pangolin::glDrawAxis(3);
//点的创建
glPointSize(10.0f);
glBegin(GL_POINTS);
glColor3f(1.0,1.0,1.0);
glVertex3f(0.0f,0.0f,0.0f);
glVertex3f(1,0,0);
glVertex3f(0,2,0);
glEnd();
//把下面的点都做一次旋转变换
glPushMatrix();
//col major
std::vector<GLfloat > Twc = {1,0,0,0, 0,1,0,0 , 0,0,1,0 ,0,0,5,1};
glMultMatrixf(Twc.data());
//直线的创建
const float w = 2;
const float h = w*0.75;
const float z = w*0.6;
glLineWidth(2);
glColor3f(1.0,0,0);
glBegin(GL_LINES);
glVertex3f(0,0,0);
glVertex3f(w,h,z);
glVertex3f(0,0,0);
glVertex3f(w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(-w,-h,z);
glVertex3f(w,-h,z);
glVertex3f(w,-h,z);
glVertex3f(w,h,z);
glEnd();
glPopMatrix();
// Swap frames and Process Events
pangolin::FinishFrame();
}
return 0;
}
0.4. Plot data with ros
参照SimplePlot, !pangolin::ShouldQuit() 换成ros::ok(),就可以
参照SimpleDisplay, 可以做出选项配置

