ROS应用层通信协议解析
参考:http://wiki.ros.org/ROS/Master_API
http://wiki.ros.org/ROS/Connection Header
说明
ROS本质上就是一个松耦合的通信框架,通信模式包括:远程调用(service-client)、订阅发布(topic)、持续通信(action)和全局参数(参数服务器),这四种模式基本已经能够涵盖百分之九十的应用场景了
本次针对订阅发布模式,探究一下ROS通信中的具体通信协议,读完本文后,你可以在不依赖ROS的情况下和ROS通信
本次通信采用从机订阅主机数据,通过wireshark抓包,得到具体xmlrpc协议数据内容,根据xmlrpc协议格式,找到对应代码
(因为时间有限,部分协议可能有跳过的地方)
1、registerPublisher
从机创建节点的第一步
这个方法用于注册一个发布者的caller
request报文body:
<?xml version="1.0"?>
<methodCall>
<methodName>registerPublisher</methodName>
<params>
<param>
<value>/test_sub</value>
</param>
<param>
<value>/rosout</value>
</param>
<param>
<value>rosgraph_msgs/Log</value>
</param>
<param>
<value>http://192.168.1.150:40209</value>
</param>
</params>
</methodCall>
response报文body:
<?xml version='1.0'?>
<methodResponse>
<params>
<param>
<value>
<array>
<data>
<value>
<int>1</int>
</value>
<value>
<string>Registered [/test_sub] as publisher of [/rosout]</string>
</value>
<value>
<array>
<data>
<value>
<string>http://sherlock:35861/</string>
</value>
</data>
</array>
</value>
</data>
</array>
</value>
</param>
</params>
</methodResponse>
先说结论:
ROS有一个日志相关的topic,名称是 /rosout,所有节点的日志信息都会通过这个 topic 发布出来
ROS还有一个日志相关的节点,名称是 /rosout,负责订阅 /rosout数据,然后使用名称为 /rosout_agg 的topic发布出来, /rosout_agg 的订阅者是rqt等调试工具
所以,结合上面的xml内容,我们可以大致推断,创建一个新的节点,那么这个节点必定会发布一个topic,就是/rosout,所以上面的XMLRPC协议内容,就是网rosmaster内注册一个publisher,用于发布/rosout
整体来说,就是调用接口
registerPublisher("/test_sub", "/rosout", "rosgraph_msgs/Log", "http://192.168.1.150:40209")
返回值是:
1
Registered [/test_sub] as publisher of [/rosout]
http://sherlock:35861/
1是固定数据
第二行是message
最后一个返回值表示订阅者的uri列表,这里因为只有一个订阅者,所有只有一个uri
再看代码:
函数声明如下:
registerPublisher(caller_id, topic, topic_type, caller_api)
Register the caller as a publisher the topic.
参数
caller_id (str)
ROS caller ID
topic (str)
Fully-qualified name of topic to register.
topic_type (str)
Datatype for topic. Must be a package-resource name, i.e. the .msg name.
caller_api (str)
API URI of publisher to register.
返回值(int, str, [str])
(code, statusMessage, subscriberApis)
List of current subscribers of topic in the form of XMLRPC URIs.
找到 registerPublisher 接接口,位于ros_comm/rosmaster 包中,文件为:master_api.py(ROS主从机制利用python实现,拿掉python则无法实现主从)
@apivalidate([], ( is_topic('topic'), valid_type_name('topic_type'), is_api('caller_api')))
def registerPublisher(self, caller_id, topic, topic_type, caller_api):
"""
Register the caller as a publisher the topic.
@param caller_id: ROS caller id
@type caller_id: str
@param topic: Fully-qualified name of topic to register.
@type topic: str
@param topic_type: Datatype for topic. Must be a
package-resource name, i.e. the .msg name.
@type topic_type: str
@param caller_api str: ROS caller XML-RPC API URI
@type caller_api: str
@return: (code, statusMessage, subscriberApis).
List of current subscribers of topic in the form of XMLRPC URIs.
@rtype: (int, str, [str])
"""
#NOTE: we need topic_type for getPublishedTopics.
try:
self.ps_lock.acquire()
self.reg_manager.register_publisher(topic, caller_id, caller_api)
# don't let '*' type squash valid typing
if topic_type != rosgraph.names.ANYTYPE or not topic in self.topics_types:
self.topics_types[topic] = topic_type
pub_uris = self.publishers.get_apis(topic)
sub_uris = self.subscribers.get_apis(topic)
self._notify_topic_subscribers(topic, pub_uris, sub_uris)
mloginfo("+PUB [%s] %s %s",topic, caller_id, caller_api)
sub_uris = self.subscribers.get_apis(topic)
finally:
self.ps_lock.release()
return 1, "Registered [%s] as publisher of [%s]"%(caller_id, topic), sub_uris
registerPublisher 接口的注释:Register the caller as a publisher the topic,将调用者注册为一个topic发布者
可以对应xmlrpc中对应参数,加上猜测:
caller_id:调用者,可以认为是节点,/test_sub,从及创建的节点
topic:发布的topic name,/rosout
topic_type:发布的topic数据类型,rosgraph_msgs/Log
caller_api:调用者发布数据的API接口,http://192.168.1.150:40209
总上,我们大概有几点猜测:
- 接口在rosmaster中,接口是registerPublisher,表示,这是注册节点的
- 告诉master节点,我创建了一个节点,节点名是/test_sub
- 告诉master,这个节点需要发布topic,topic名是/rosout,数据类型是rosgraph_msgs/Log
registerPublisher 接口中有三个地方需要注意:
- register_publisher接口调用
- _notify_topic_subscribers接口调用,告知当前所有的subscriber,有新的publisher,他们需要再次到新的publisher中去订阅数据
- return 内容,最后会拼接成xmlrpc的报文,response 回去,这也就顺便解释了第二条xmlrpc报文(response)
register_publisher
先看 register_publisher,代码在rosmaster中的registrations.py文件中
def register_publisher(self, topic, caller_id, caller_api):
"""
Register topic publisher
@return: None
"""
self._register(self.publishers, topic, caller_id, caller_api)
_register 接口,这个节点做了三件事
- 调用内部接口保存节点信息
- 如果这个节点之前已经存在,就表明它是在更新,则发布数据的接口改变,且之前已经有订阅,则此时所有订阅该接口的所有subscriber解除订阅
- 调用register接口保存
def _register(self, r, key, caller_id, caller_api, service_api=None):
# update node information
node_ref, changed = self._register_node_api(caller_id, caller_api)
node_ref.add(r.type, key)
# update pub/sub/service indicies
if changed:
self.publishers.unregister_all(caller_id)
self.subscribers.unregister_all(caller_id)
self.services.unregister_all(caller_id)
self.param_subscribers.unregister_all(caller_id)
r.register(key, caller_id, caller_api, service_api)
_register_node_api 接口,我们可以看到,它主要做两件事
- 更新master中节点信息(节点名、节点发布数据的接口)
- 检查这个节点是不是已经存在,如果是,则告诉调用者
def _register_node_api(self, caller_id, caller_api):
"""
@param caller_id: caller_id of provider
@type caller_id: str
@param caller_api: caller_api of provider
@type caller_api: str
@return: (registration_information, changed_registration). changed_registration is true if
caller_api is differet than the one registered with caller_id
@rtype: (NodeRef, bool)
"""
node_ref = self.nodes.get(caller_id, None)
bumped_api = None
if node_ref is not None:
if node_ref.api == caller_api:
return node_ref, False
else:
bumped_api = node_ref.api
self.thread_pool.queue_task(bumped_api, shutdown_node_task,
(bumped_api, caller_id, "new node registered with same name"))
node_ref = NodeRef(caller_id, caller_api)
self.nodes[caller_id] = node_ref
return (node_ref, bumped_api != None)
_notify_topic_subscribers
_notify_topic_subscribers 代码,根据注释说明,接口的作用就是通知所有的subscriber,有新的publisher
def _notify_topic_subscribers(self, topic, pub_uris, sub_uris):
"""
Notify subscribers with new publisher list
@param topic: name of topic
@type topic: str
@param pub_uris: list of URIs of publishers.
@type pub_uris: [str]
"""
self._notify(self.subscribers, publisher_update_task, topic, pub_uris, sub_uris)
_notify 代码,将更新的通知任务(publisher_update_task)放进事件队列中,等待执行:
def _notify(self, registrations, task, key, value, node_apis):
"""
Generic implementation of callback notification
@param registrations: Registrations
@type registrations: L{Registrations}
@param task: task to queue
@type task: fn
@param key: registration key
@type key: str
@param value: value to pass to task
@type value: Any
"""
# cache thread_pool for thread safety
thread_pool = self.thread_pool
if not thread_pool:
return
try:
for node_api in node_apis:
# use the api as a marker so that we limit one thread per subscriber
thread_pool.queue_task(node_api, task, (node_api, key, value))
except KeyError:
_logger.warn('subscriber data stale (key [%s], listener [%s]): node API unknown'%(key, s))
publisher_update_task 代码,传入的三个参数分别是:新节点的接口、topic名称、订阅者的接口:
def publisher_update_task(api, topic, pub_uris):
"""
Contact api.publisherUpdate with specified parameters
@param api: XML-RPC URI of node to contact
@type api: str
@param topic: Topic name to send to node
@type topic: str
@param pub_uris: list of publisher APIs to send to node
@type pub_uris: [str]
"""
msg = "publisherUpdate[%s] -> %s %s" % (topic, api, pub_uris)
mloginfo(msg)
start_sec = time.time()
try:
#TODO: check return value for errors so we can unsubscribe if stale
ret = xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)
msg_suffix = "result=%s" % ret
except Exception as ex:
msg_suffix = "exception=%s" % ex
raise
finally:
delta_sec = time.time() - start_sec
mloginfo("%s: sec=%0.2f, %s", msg, delta_sec, msg_suffix)
publisherUpdate 接口在 rospy 模块的 masterslave.py 文件中,猜测是使用XMLRPC协议,通知所有的订阅者节点,发布者更新了
@apivalidate(-1, (is_topic('topic'), is_publishers_list('publishers')))
def publisherUpdate(self, caller_id, topic, publishers):
"""
Callback from master of current publisher list for specified topic.
@param caller_id: ROS caller id
@type caller_id: str
@param topic str: topic name
@type topic: str
@param publishers: list of current publishers for topic in the form of XMLRPC URIs
@type publishers: [str]
@return: [code, status, ignore]
@rtype: [int, str, int]
"""
if self.reg_man:
for uri in publishers:
self.reg_man.publisher_update(topic, publishers)
return 1, "", 0
2、hasParam
request报文body
<?xml version='1.0'?>
<methodResponse>
<params>
<param>
<value>
<array>
<data>
<value>
<int>1</int>
</value>
<value>
<string>/use_sim_time</string>
</value>
<value>
<boolean>0</boolean>
</value>
</data>
</array>
</value>
</param>
</params>
</methodResponse>
response报文body
<?xml version="1.0"?>
<methodCall>
<methodName>requestTopic</methodName>
<params>
<param>
<value>/rosout</value>
</param>
<param>
<value>/rosout</value>
</param>
<param>
<value>
<array>
<data>
<value>
<array>
<data>
<value>TCPROS</value>
</data>
</array>
</value>
</data>
</array>
</value>
</param>
</params>
</methodCall>
先说结论:
调用 hasParam 接口,检查参数服务器是否有参数 /test_sub/use_sim_time
返回值是 [1, /use_sim_time, 0],表示没有
再看代码:
hasParam
有了上面的分析经验,我们可以很轻松地的出结论,这是在调用 hasParam 接口
我们可以很轻松地找到这个方法的代码,在rosmaster模块的master_api.py文件中
@apivalidate(False, (non_empty_str('key'),))
def hasParam(self, caller_id, key):
"""
Check if parameter is stored on server.
@param caller_id str: ROS caller id
@type caller_id: str
@param key: parameter to check
@type key: str
@return: [code, statusMessage, hasParam]
@rtype: [int, str, bool]
"""
key = resolve_name(key, caller_id)
if self.param_server.has_param(key):
return 1, key, True
else:
return 1, key, False
根据协议
- caller_id 传参是 /test_sub
- key 传参是 /use_sim_time
根据注释和代码,我们可以确认,这个就口就是在检查,参数服务器是否有参数 /test_sub/use_sim_time
resolve_name 接口接收两个参数,根据调用:
- name是/use_sim_time
- namespace_是/test_sub
所以,才能确认上面的全局参数 /test_sub/use_sim_time
hasParam 接口的返回值有三个
- code,整型,这里无论有没有,都返回1,可以忽略
- key,这里就是 /use_sim_time
- hasParam,表示是否有这个参数,True/False
根据 response 报文,这里应该返回 [1, /use_sim_time, 0],表示没有这个参数
use_sim_time
想要理解为什么要调用这个接口,就要理解 use_sim_time 参数的作用
use_sim_time是一个重要的参数,它默认值为false,可以配合Rosbag使用,是一个很重要的离线调试工具
我们都知道,ROS 中的时间有两种:
- ROS::Time()
- ROS::WallTime()
ROS::Time()和ROS::WallTime()
表示ROS网络中的时间,如果当时在非仿真环境里运行,那它就是当前的时间。但是假设去回放当时的情况,那就需要把当时的时间录下来
以控制为例,很多的数据处理需要知道当时某一个时刻发生了什么。Wall Time可以理解为墙上时间,墙上挂着的时间没有人改变的了,永远在往前走;ROS Time可以被人为修改,你可以暂停它,可以加速,可以减速,但是Wall Time不可以。
在开启一个Node之前,当把use_sim_time设置为true时,这个节点会从clock Topic获得时间。所以操作这个clock的发布者,可以实现一个让Node中得到ROS Time暂停、加速、减速的效果。同时下面这些方面都是跟Node透明的,所以非常适合离线的调试方式。当把ROSbag记下来以后重新play出来时,加两个横杠,--clock,它就会发布出这个消息
3、registerSubscriber
先看报文:
request报文body
<?xml version="1.0"?>
<methodCall>
<methodName>registerSubscriber</methodName>
<params>
<param>
<value>/test_sub</value>
</param>
<param>
<value>/ros_message</value>
</param>
<param>
<value>my_package/MessageDefine</value>
</param>
<param>
<value>http://192.168.1.150:43597</value>
</param>
</params>
</methodCall>
response报文body
<?xml version='1.0'?>
<methodResponse>
<params>
<param>
<value>
<array>
<data>
<value>
<int>1</int>
</value>
<value>
<string>Subscribed to [/ros_message]</string>
</value>
<value>
<array>
<data>
<value>
<string>http://sherlock:41689/</string>
</value>
</data>
</array>
</value>
</data>
</array>
</value>
</param>
</params>
</methodResponse>
registerSubscriber
registerSubscriber 代码在rosmaster包中的master_api.py文件中,如下:
@apivalidate([], ( is_topic('topic'), valid_type_name('topic_type'), is_api('caller_api')))
def registerSubscriber(self, caller_id, topic, topic_type, caller_api):
"""
Subscribe the caller to the specified topic. In addition to receiving
a list of current publishers, the subscriber will also receive notifications
of new publishers via the publisherUpdate API.
@param caller_id: ROS caller id
@type caller_id: str
@param topic str: Fully-qualified name of topic to subscribe to.
@param topic_type: Datatype for topic. Must be a package-resource name, i.e. the .msg name.
@type topic_type: str
@param caller_api: XML-RPC URI of caller node for new publisher notifications
@type caller_api: str
@return: (code, message, publishers). Publishers is a list of XMLRPC API URIs
for nodes currently publishing the specified topic.
@rtype: (int, str, [str])
"""
#NOTE: subscribers do not get to set topic type
try:
self.ps_lock.acquire()
self.reg_manager.register_subscriber(topic, caller_id, caller_api)
# ROS 1.1: subscriber can now set type if it is not already set
# - don't let '*' type squash valid typing
if not topic in self.topics_types and topic_type != rosgraph.names.ANYTYPE:
self.topics_types[topic] = topic_type
mloginfo("+SUB [%s] %s %s",topic, caller_id, caller_api)
pub_uris = self.publishers.get_apis(topic)
finally:
self.ps_lock.release()
return 1, "Subscribed to [%s]"%topic, pub_uris
根据协议往来,我们可以看到调用过程
registerSubscriber("/test_sub", "/ros_message", "my_package/MessageDefine", "http://192.168.1.150:43597")
入参有4个:
- 订阅节点名:/test_sub
- 需要订阅的topic 名称:/ros_message
- topic的数据类型:my_package/MessageDefine
- 订阅节点自己的uri,即发布者通知时的发送目标
返回值有3个:
-
code,这里固定是1
-
message,这里是 Subscribed to [/ros_message]
-
publisher 的订阅URI 列表,因为这里只有一个publisher,所以只有一个 http://sherlock:41689/,首先,这可能是主机里面某个几点的uri,需要从机去订阅
代码说明:
和第一条,注册publisher相反,这里是注册subscriber
有几个关键代码
register_subscriber 代码,位于rosmaster包中的registerations.py文件中:
def register_subscriber(self, topic, caller_id, caller_api):
"""
Register topic subscriber
@return: None
"""
self._register(self.subscribers, topic, caller_id, caller_api)
_register 代码,调用 _register_node_api 接口更新节点信息,如果之前有该节点的注册信息,则先删除:
def _register(self, r, key, caller_id, caller_api, service_api=None):
# update node information
node_ref, changed = self._register_node_api(caller_id, caller_api)
node_ref.add(r.type, key)
# update pub/sub/service indicies
if changed:
self.publishers.unregister_all(caller_id)
self.subscribers.unregister_all(caller_id)
self.services.unregister_all(caller_id)
self.param_subscribers.unregister_all(caller_id)
r.register(key, caller_id, caller_api, service_api)
_register_node_api 代码:
def _register_node_api(self, caller_id, caller_api):
"""
@param caller_id: caller_id of provider
@type caller_id: str
@param caller_api: caller_api of provider
@type caller_api: str
@return: (registration_information, changed_registration). changed_registration is true if
caller_api is differet than the one registered with caller_id
@rtype: (NodeRef, bool)
"""
node_ref = self.nodes.get(caller_id, None)
bumped_api = None
if node_ref is not None:
if node_ref.api == caller_api:
return node_ref, False
else:
bumped_api = node_ref.api
self.thread_pool.queue_task(bumped_api, shutdown_node_task,
(bumped_api, caller_id, "new node registered with same name"))
node_ref = NodeRef(caller_id, caller_api)
self.nodes[caller_id] = node_ref
return (node_ref, bumped_api != None)
shutdown_node_task 代码,如果订阅节点退出了,则需要通知:
def shutdown_node_task(api, caller_id, reason):
"""
Method to shutdown another ROS node. Generally invoked within a
separate thread as this is used to cleanup hung nodes.
@param api: XML-RPC API of node to shutdown
@type api: str
@param caller_id: name of node being shutdown
@type caller_id: str
@param reason: human-readable reason why node is being shutdown
@type reason: str
"""
try:
xmlrpcapi(api).shutdown('/master', "[{}] Reason: {}".format(caller_id, reason))
except:
pass #expected in many common cases
remove_server_proxy(api)
4、requestTopic
request报文body,如下,我们可以看到,xmlrpc发送的host是sherlock:41689,是上一步骤,收到的publisher的uri,如果有多个publisher,要request多次
POST /RPC2 HTTP/1.1
Host: sherlock:41689
User-Agent: Go-http-client/1.1
Content-Length: 307
Content-Type: text/xml
Accept-Encoding: gzip
<?xml version="1.0"?>
<methodCall>
<methodName>requestTopic</methodName>
<params>
<param>
<value>/test_sub</value>
</param>
<param>
<value>/ros_message</value>
</param>
<param>
<value>
<array>
<data>
<value>
<array>
<data>
<value>TCPROS</value>
</data>
</array>
</value>
</data>
</array>
</value>
</param>
</params>
</methodCall>
response报文
<?xml version="1.0"?>
<methodResponse>
<params>
<param>
<value>
<array>
<data>
<value>
<i4>1</i4>
</value>
<value></value>
<value>
<array>
<data>
<value>TCPROS</value>
<value>sherlock</value>
<value>
<i4>33173</i4>
</value>
</data>
</array>
</value>
</data>
</array>
</value>
</param>
</params>
</methodResponse>
根据协议,调用过程如下:
requestTopic("/test_sub", "/ros_message", ["TCPROS"])
告诉publisher,subscriber准备好了,可以发数据了
requestTopic
_remap_table['requestTopic'] = [0] # remap topic
@apivalidate([], (is_topic('topic'), non_empty('protocols')))
def requestTopic(self, caller_id, topic, protocols):
"""
Publisher node API method called by a subscriber node.
Request that source allocate a channel for communication. Subscriber provides
a list of desired protocols for communication. Publisher returns the
selected protocol along with any additional params required for
establishing connection. For example, for a TCP/IP-based connection,
the source node may return a port number of TCP/IP server.
@param caller_id str: ROS caller id
@type caller_id: str
@param topic: topic name
@type topic: str
@param protocols: list of desired
protocols for communication in order of preference. Each
protocol is a list of the form [ProtocolName,
ProtocolParam1, ProtocolParam2...N]
@type protocols: [[str, XmlRpcLegalValue*]]
@return: [code, msg, protocolParams]. protocolParams may be an
empty list if there are no compatible protocols.
@rtype: [int, str, [str, XmlRpcLegalValue*]]
"""
if not get_topic_manager().has_publication(topic):
return -1, "Not a publisher of [%s]"%topic, []
for protocol in protocols: #simple for now: select first implementation
protocol_id = protocol[0]
for h in self.protocol_handlers:
if h.supports(protocol_id):
_logger.debug("requestTopic[%s]: choosing protocol %s", topic, protocol_id)
return h.init_publisher(topic, protocol)
return 0, "no supported protocol implementations", []
init_publisher 代码
def init_publisher(self, resolved_name, protocol):
"""
Initialize this node to receive an inbound TCP connection,
i.e. startup a TCP server if one is not already running.
@param resolved_name: topic name
@type resolved__name: str
@param protocol: negotiated protocol
parameters. protocol[0] must be the string 'TCPROS'
@type protocol: [str, value*]
@return: (code, msg, [TCPROS, addr, port])
@rtype: (int, str, list)
"""
if protocol[0] != TCPROS:
return 0, "Internal error: protocol does not match TCPROS: %s"%protocol, []
start_tcpros_server()
addr, port = get_tcpros_server_address()
return 1, "ready on %s:%s"%(addr, port), [TCPROS, addr, port]
publisher 检查,是否支持指定协议,如果不支持,则返回1,否则返回0
返回值的第二个参数有三个值,分别是协议类型、ip地址 和 端口
5、unregisterSubscriber
request报文body
<?xml version="1.0"?>
<methodCall>
<methodName>unregisterSubscriber</methodName>
<params>
<param>
<value>/test_sub</value>
</param>
<param>
<value>/ros_message</value>
</param>
<param>
<value>http://192.168.1.150:43597</value>
</param>
</params>
</methodCall>
response报文body
<?xml version='1.0'?>
<methodResponse>
<params>
<param>
<value>
<array>
<data>
<value>
<int>1</int>
</value>
<value>
<string>Unregistered [/test_sub] as provider of [/ros_message]</string>
</value>
<value>
<int>1</int>
</value>
</data>
</array>
</value>
</param>
</params>
</methodResponse>
unregisterSubscriber
@apivalidate(0, (is_topic('topic'), is_api('caller_api')))
def unregisterSubscriber(self, caller_id, topic, caller_api):
"""
Unregister the caller as a subscriber of the topic.
@param caller_id: ROS caller id
@type caller_id: str
@param topic: Fully-qualified name of topic to unregister.
@type topic: str
@param caller_api: API URI of service to unregister. Unregistration will only occur if current
registration matches.
@type caller_api: str
@return: (code, statusMessage, numUnsubscribed).
If numUnsubscribed is zero it means that the caller was not registered as a subscriber.
The call still succeeds as the intended final state is reached.
@rtype: (int, str, int)
"""
try:
self.ps_lock.acquire()
retval = self.reg_manager.unregister_subscriber(topic, caller_id, caller_api)
mloginfo("-SUB [%s] %s %s",topic, caller_id, caller_api)
return retval
finally:
self.ps_lock.release()
取消订阅,固定返回1
6、TCP数据私有协议
首先保证主从机的数据类型一致,包括字段的顺序,实际ROS框架内是通过md5检测,保证数据类型一致的
数据传输前提:
- 数据类型一致
- 字段名一致
- 字段顺序一致
数据传输模式:小端hex
数据包结构
| 数据域长度 | 数据域 |
|---|---|
| 4 byte | n byte |
数据域长度固定4byte,长度不包括自身
数据域
数据域根据字段类型解析,ros 通信的内置数据类型有:
| 原始类型 | 字节数 |
|---|---|
| bool | 1 |
| int8 | 1 |
| uint8 | 1 |
| int16 | 2 |
| uint16 | 2 |
| int32 | 4 |
| uint32 | 4 |
| int64 | 8 |
| uint64 | 8 |
| float32 | 4 |
| float64 | 8 |
| string | n(n > 4) |
| time | 8 |
| duration | 8 |
| 数组 | n(n > 4) |
其中,除 string、time、duration 和 数组 类型外的其余类型,直接根据字节数读取即可
string
字符串类型,也可认为是字符数组(则可以和数组类型复用),因为是不定长度,所以需要知道字符串的长度,ROS中使用uint32类型表示长度/数组元素数量,即4byte
所以,如果出现字符串类型,则数据域为:
| 字符串长度 | 字符 |
|---|---|
| 4 byte | n byte |
数组
数组类型,因为是不定长度,所以需要知道数组的元素数量,和string同理,ROS 中使用uint32类型表示数组的元素数量,再结合数组元素的类型,即可得到总长度
所以,出现数组类型,则数据域为:
| 数组元素数量 | 数组数据 |
|---|---|
| 4 byte | n byte |
如果数组类型是 int32,则数组数据占 4 * n byte,其余类型以此类推
time
ROS 中把 time 单独提取作为基本数据类型,对应 ROS 中的 ros::Time 类,因为我们可以认为是嵌套类型
ros::Time 有两个字段:
- sec: uint32
- nsec: uint32
所以,time 类型在数据域占8byte,如果出现 time 类型,则数据域为:
| sec | nsec |
|---|---|
| 4 byte | 4 byte |
duration
duration 类型和 time 相同,在 ROS 中对应 ros::Duration 类,可以认为是嵌套类型
ros::Duration 有两个字段:
- sec: uint32
- nsec: uint32
所以,duration 类型在数据域中占8byte,如果出现 duration 类型,则数据域为:
| sec | nsec |
|---|---|
| 4 byte | 4 byte |
嵌套类型
嵌套类型可以认为是数据域的组合,如果发现字段类型不是内置数据类型,则可认为是嵌套类型,嵌套类型按照类型的字段,递归处理即可
协议分析示例
示例1:
.msg 文件为:
int8 shutdown_time
string text
主机发出数据为:
shutdown_time = 123
text = abc
从机收到数据为:
08 00 00 00 7b 03 00 00 00 61 62 63
分析如下:
-
包头4 byte表示数据与长度
08 00 00 00,表示数据域长度为8,即后续数据总长度为8
-
字段1为shutdown_time,类型是int8,1byte
7b转10进制,为123
-
字段2为text,类型是字符串 (4+n)byte
4byte 长度:03 00 00 00,表示字符串长度为3,后面3byte 为字符串内容:61 62 63,ASCII转换为:abc)
示例2:
.msg 文件为:
Header header
int8 shutdown_time
int32 shutdown_time2
string text
float32 num
string text2
int8[] data
int16[] data2
Header的数据类型为:
uint32 seq
time stamp
string frame_id
主机发出数据为:
//header一般由ROS系统自己处理,这里写出来是为了方便观察
header.seq = 29;
header.time.sec = 0;
header.time.nsec = 0;
header.frame_id = "";
shutdown_time = 123;
shutdown_time2 = 987654;
text2 = "lmn";
text = "abc";
num = 23.4;
data = [1, 2, 4, 89];
data2 = [11, 22, 908]
从机收到的数据为:
39 00 00 00 1d 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 7b 06 12 0f 00 03 00 00 00 61 62 63 33 33 bb 41 03 00 00 00 6c 6d 6e 04 00 00 00 01 02 04 59 03 00 00 00 0b 00 16 00 8c 03
分析如下:
-
包头4byte表示数据域长度
0x39 00 00 00,10进制57,表明后续数据域长度57byte
-
字段1,Header 类型,可以认为是嵌套类型,Header字段如下:
- 字段1,seq,uint32,4byte,数据为,0x1d 00 00 00,十进制29;
- 字段2,time类型,可以认为是嵌套类型,字段如下:
- 字段1,sec,uint32,4byte,数据为:0x00 00 00 00,十进制0;
- 字段2,nsec,uint32,4byte,数据为:0x00 00 00 00,十进制0;
- 字段3,frame_id,字符串类型,4byte 表示长度,00 00 00 00,表示长度为0,字符串为空
-
字段2,shutdown_time,int8,1byte,数据为:0x7b,十进制123;
-
字段3,shutdown_time2,int32,4byte,数据为:0x06 12 0f 00,十进制:987654;
-
字段4,text,字符串:
- 4byte 长度,数据为:0x03 00 00 00 ,表示字符产长度为3;
- 字符串内容,数据为:0x61 62 63 ,ASCII对应:abc;
-
字段5,num,flota32,4byte,数据为:33 33 bb 41,十进制:23.4;
-
字段6:text2,字符串:
- 4byte长度,数据为:0x03 00 00 00,表示字符串长度为3;
- 字符产内容,数据为:0x6c 6d 6e,ASCII对应lmn;
-
字段7,data,int8数组:
- 4byte表示数组元素数量,数据为:0x04 00 00 00,表示有4个int8元素:
- 数组内容:[0x01, 0x02, 0x04, 0x59,],表示:[1,2,4,89];
-
字段8,data2,int16数组:
- 4byte表示长度,数据为:0x03 00 00 00,表示有3个int16数据;
- 数组内容:[0x0b00, 0x1600, 0x8c03],表示:[11, 22, 908]
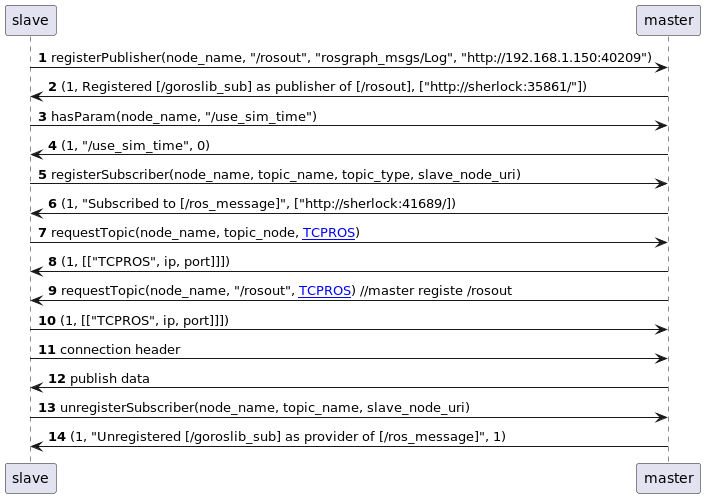
7、小结
宗上,整体的从机订阅时序图如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号