
Depth from Videos in the Wild 解读
2019年7月17日11:37:05
论文 Depth from Videos in the Wild: Unsupervised Monocular Depth Learning from Unknown Cameras
主要有几个亮点:
1,处理移动物体时 instance segmentation and tracking are not required,不需要实例分割,
虽然文章里说还是需要一个网络预测可能移动的区域,但比起需要实例分割,难度还是下降了点。
2,occlusion-aware consistency 遮挡情形下的深度预测一致性
3,能够通过网络学习内参
这篇文章还是有点干货的,毕竟谷歌出品。
先讨论第二点,遮挡情形下的深度预测的问题
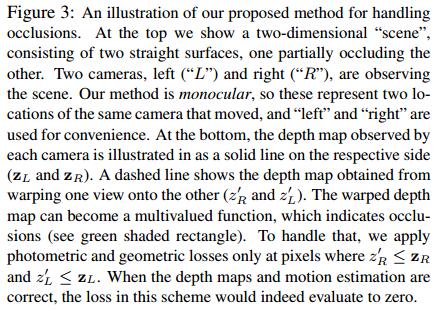
这里很好理解也比较好实现:
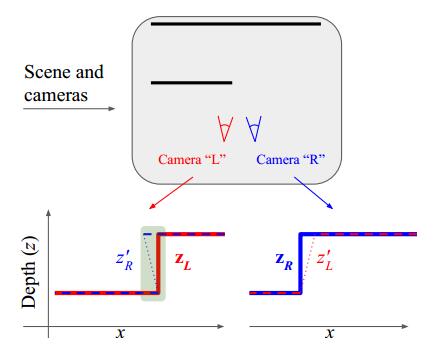
左右两个相机对同一个场景进行观察,但是因为存在遮挡的原因,左右两个相机对
同一个三维点的深度预测结果不一致。这些遮挡区域有什么特点呢?
左右两个相机对同一个三维点的预测深度分别为$\mathbf{z}_{L}$和$\mathbf{z}_{R}$
然后
把$\mathbf{z}_{L}$变换(warp)到右相机所在的位置得到深度$z_{L}^{\prime}$
把$\mathbf{z}_{R}$变换到左相机所在的位置得到深度$z_{R}^{\prime}$
we apply photometric and geometric losses only at pixels where $z_{R}^{\prime} \leq \mathbf{z}_{R}$
and $z_{L}^{\prime} \leq \mathbf{z}_{L}$.
只在 $z_{R}^{\prime} \leq \mathbf{z}_{R}$ 和 $z_{L}^{\prime} \leq \mathbf{z}_{L}$的区域计算 photometric 和 geometric losses。
为什么是这些区域?
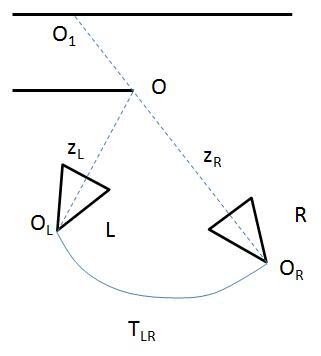
理想情况如下:

左相机L和右相机R观察同一个三维点O。
O到左相机的光心$O_L$距离为$z_L$,右相机类似。
从右相机到左相机的变换为$T_{LR}$,因此有如下关系:
$z_{R}^{\prime} = z_L=T_{LR}*z_R$
$z_{L}^{\prime} = z_R=T_{RL}*z_L$
也就是说,在两个不同的位置观察到的同一个三维点的深度$z_L$和$z_R$看起来大小
不一样,但是换算到到对方的位置后,应该是相等的。
下面是有遮挡的情况中的一种(右相机看的到,左相机看不到):
这里就不仅要像sfmlearner中做warp ref img to tgt ,还要在两个相机位置上互相warp深度图,
再把上述区域剔除出计算loss的部分。
深度不一致,一是因为有遮挡,二是因为这个三维点在运动。
所以这个方式对于处理移动物体的深度预测也是有帮助的
总的来讲就是要让loss计算的更清楚,把不该计算的部分剔除出去。
想了一下,warp ref_img和warp 深度图Z是一样的,利用现有设施简单改造下
就可以达到目标。
2019年7月19日23:42:42
遮挡的处理会干扰ssim的计算。。。
做法是当两帧之间的depth discrepancy 相比 depth discrepancy 的RMS较大
的时候,降低ssim在这个区域的权重?
2019年7月20日10:13:56
关于内参的学习,之前在sfmlearner剖析的博客中简单推导了一下公式,
这篇文章中不用T,用(R*XYZ+t)的写法替换,其他都是一样的,写成:
$depth_2*uv_2 = K\left(R*XYZ_1+t\right)$
$depth_2*uv_2 = K*R*depth_1*K^{-1}*uv_1+K*t$
调整下$depth_1$的顺序:
$$ depth_2*uv_2 = K*R*K^{-1}*depth_1*uv_1+K*t \tag{0} $$
这个就是论文中的方程1:
$$ z^{\prime} p^{\prime}=K R K^{-1} z p+K t \tag{1}$$
这里就没有把$depth_2$省略。
方程1的好处就是图片中的每个像素都要符合这个方程:
$z^{\prime}\left[\begin{array}{l}{u_2} \\ {v_2} \\ {1}\end{array}\right]= K R K^{-1} z\left[\begin{array}{l}{u_1} \\ {v_1} \\ {1}\end{array}\right]+K t $
也就是说,误差信号在反向传播时也能传导到每个像素。
然后
$K=\left(\begin{array}{ccc}{f_{x}} & {0} & {x_{0}} \\ {0} & {f_{y}} & {y_{0}} \\ {0} & {0} & {1}\end{array}\right)$
文章然后说了t提供不了内参学习时的监督信息,而且有可能产生假的解,又说了旋转信号R可以
提供内参学习时的监督信息,
附录A.2的推导解释了当旋转矩阵不为单位矩阵时,学出来的内参K会是正确的、唯一的。
Mathematically, $R = I$ provides no supervision signal for K, whereas $R \neq I$ provides a complete supervision siglal for it.
为了简化起见,假设相机只有绕y轴的旋转,且没有平移,则方程1简化成:
$$\Delta p_{x}=r_{y} f_{x}+\frac{r_{y}\left(p_{x}-x_{0}\right)^{2}}{f_{x}}$$
$\Delta p_{x}=p_{x}^{\prime}-p_{x}$,$\Delta p_{x}$就是监督信号的来源。
这里可以想象沿着y轴从上往下看相机坐标系,大概就是个二维坐标绕原点旋转的情形。
$p_{x}^{\prime}$就是u2,$p_{x}$就是u1。
后面的推导看的不是太懂,最后推导出了一个关于误差的不等式,应该符合什么样的规律,
也没说具体怎么操作,文章4.4节开头大概说了一下网络结构。
到了这里我就想:为什么我们不直接解方程组1来得到所有我们想要的 z,R,t,K,反正
所有的东西都是从方程组1来的,每一对像素都可以列一个方程。。。
文章里还说了,除了有移动物体的区域,整个图像上每个像素的 R 和 t 都是一样的。
用了一个mask来代表有移动物体的区域,在这个mask内的像素 t 可以不一样。
文章用了两个网络,
一个预测深度,
一个预测其他的东西(egomotion, object motion field relative to the scene, and camera intrinsics )
网络应该是把 有遮挡的区域 和 移动物体区域 一并处理了
可以猜测,学习内参K无非是在学习pose的基础上再多学几个参数,而且这些参数在
迭代过程中趋向于一个固定的值,文章中的说法是从 posenet 的bottleneck引出来的。
这样看来学习内参K似乎也没那么难。。。
要换掉batch normalization !

batchsize越大反而不好,把 batch normalization换成带有高斯噪声的layer nomalization
后效果会大大提高,之后增加batchsize才会略微让效果变好。。。
添加一定的噪声相当于正则化
另外一种理解是噪声能挤压解空间,缩小搜索范围,提高迭代效果。
我之前因为显存不足都是把batchsize设为1 然后训练一晚上,歪打正着。。。
2019年7月21日23:01:40
关于LayerNorm,pytorch 中已经有实现:
https://pytorch.org/docs/stable/nn.html?highlight=layernorm#torch.nn.LayerNorm
另外如果要加噪声的话参考这个:
https://github.com/pytorch/pytorch/issues/1959
直接在mean 和 std 上加噪声。
高斯噪声是噪声功率一定的情形下,对信号干扰最大的噪声类型。
另外一个博客:
https://zhuanlan.zhihu.com/p/69659844
2019年7月25日14:50:59
折腾了两三天,写了好几个给 layernorm层 的 均值和方差 参数 加噪声的版本,pytorch自带的
layernorm并不能显式的、方便的把噪声加入,单这一项工作就可以写一篇博客了。。。
写了一个更完善的 data loader 。。。
下面是最终写好的带噪声的layernorm层:


1 class LnWithGN_N2(nn.Module): 2 ''' 3 对 NCHW 中的CHW做归一化,对于每个样本需要训练的参数就只有2个,因此 4 N个样本就2N个待训练参数,初始化的时候要预先知道N,即batchsize 5 ''' 6 def __init__(self, batchsize, eps=1e-5, affine=True): 7 super(LnWithGN_N2, self).__init__() 8 self.batchsize = batchsize 9 self.affine = affine 10 self.eps = eps 11 12 if self.affine: 13 self.gamma = nn.Parameter(torch.Tensor(self.batchsize).uniform_()) 14 self.beta = nn.Parameter(torch.zeros(self.batchsize)) 15 16 def forward(self, x): 17 shape = [-1] + [1] * (x.dim() - 1) 18 19 mean = x.view(x.size(0), -1).mean(1).view(*shape) 20 std = x.view(x.size(0), -1).std(1).view(*shape) 21 22 # 这里随便加了5%幅值的噪声 23 # torch.randn生成均值为0,方差为1 的高斯分布的数值。 24 mean = mean + 0.05*torch.randn( mean.size() )*mean 25 std = std + 0.05*torch.randn( std.size() )*std 26 27 mean = mean.expand( x.size() ) 28 std = std.expand( x.size() ) 29 30 y = (x - mean) / (std + self.eps) 31 32 if self.affine: 33 shape = [self.batchsize] + [1] * (x.dim() - 1) # [N, 1, 1, 1] 34 35 y = self.gamma.view(*shape).expand( x.size() )*y + \ 36 self.beta.view(*shape).expand( x.size() ) 37 return y
2019年8月3日23:39:36
遮挡部分的计算,自己瞎改还不如直接改geonet来的快,
把loss计算部分做针对性修改就好了。
geonet还把光流计算好了,对于预测移动区域的深度估计更方便。
github上只有一个看起来跑不起来的pytorch版geonet,呕。
讲到这里就会发现,在相邻帧中预测出的深度不一致,可以用来辅助提升
光流的计算效果。
上面的layernorm用了后反而效果有所下降。。。还要研究研究。。。
2019年8月18日15:25:42
youtube上有个台湾男生发布各种解说深度估计的论文的视频,搜monodepth2、struct2depth
就能搜到。
忽然想到,那个前车和本车速度一样,深度估计就会估计成无限远的问题的解决方法。
之前的做法都是互相warp到对方的位置,考察一致性。
解决无限远的问题,应该warp到一个固定的世界坐标系考察一致性。
上面提过
把$\mathbf{z}_{L}$变换(warp)到右相机所在的位置得到深度$z_{L}^{\prime}$
把$\mathbf{z}_{R}$变换到左相机所在的位置得到深度$z_{R}^{\prime}$
如果前车和本车运动速度一样,那么上述四个z都是一样的,永远都追不到的点
当然是无限远的点。
为了让warp后的距离不一样,那就应该warp到一个固定的坐标系计算距离,除了
target和source的坐标系外,还要引入另外一个不随着 target 和 source 运动的坐标系,
从固定坐标系来看,前车就是运动了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号