
HOG特征
原文请移步知乎:https://zhuanlan.zhihu.com/p/40960756
python实现:
实现
基于python的scikit-image库提供了HOG特征提取的接口:
from skimage import feature as ft features = ft.hog(image, # input image orientations=ori, # number of bins pixels_per_cell=ppc, # pixel per cell cells_per_block=cpb, # cells per blcok block_norm = 'L1', # block norm : str {‘L1’, ‘L1-sqrt’, ‘L2’, ‘L2-Hys’} transform_sqrt = True, # power law compression (also known as gamma correction) feature_vector=True, # flatten the final vectors visualise=False) # return HOG map
参数说明:
image: input image, 输入图像
orientation: 指定bin的个数. scikit-image 实现的只有无符号方向.
(根据反正切函数的到的角度范围是在-180°~ 180°之间, 无符号是指把 -180°~0°这个范围统一加上180°转换到0°~180°范围内. 有符号是指将-180°~180°转换到0°~360°范围内.)
也就是说把所有的方向都转换为0°~180°内, 然后按照指定的orientation数量划分bins. 比如你选定的orientation= 9, 则bin一共有9个, 每20°一个:
[0°~20°, 20°~40°, 40°~60° 60°~80° 80°~100°, 100°~120°, 120°~140°, 140°~160°, 160°~180°]
pixels_per_cell : 每个cell的像素数, 是一个tuple类型数据,例如(20,20)
cell_per_block : 每个BLOCK内有多少个cell, tuple类型, 例如(2,2), 意思是将block均匀划分为2x2的块
block_norm: block 内部采用的norm类型.
transform_sqrt: 是否进行 power law compression, 也就是gamma correction. 是一种图像预处理操作, 可以将较暗的区域变亮, 减少阴影和光照变化对图片的影响.
feature_vector: 将输出转换为一维向量.
visualise: 是否输出HOG image, (应该是梯度图)
scikit-image 版的HOG 没有进行cell级别的gaussian 平滑, 原文对cell进行了gamma= 8pix的高斯平滑操作.
二. HOG实例讲解(以下所有的系统参数都是按照上述论文实验得出的最佳结果确定的)
- 图像预处理
包括伽马校正和灰度化。这是可选的步骤,因为实验证明做不做影响不大。伽马校正是减少光度对实验的影响。灰度化是将彩色图片变成灰度图。其实彩色图片也可以直接处理。不过是分别对三通道的颜色值进行梯度计算,最后选择梯度最大的那个。为简单起见,假设输入为灰度图,同时大小是64*128(这个大小是上面论文的大小,也可以自己确定不同的大小,但是实验效果就不能得到保证)。
2.计算每一个像素点的梯度值,得到梯度图(规模和原图大小一样)
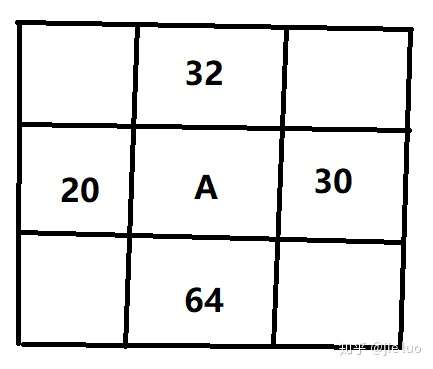
对于像素点A,要计算水平梯度和竖直梯度,如上图,水平梯度 =30-20=10,竖直梯度
=64-32=32.
那么总的梯度强度值g和梯度方向 将按照以下公式计算:
梯度方向将会取绝对值,因此梯度方向的范围是0-180度。取绝对值的原因是这样效果更好。
3.计算梯度直方图
按照第二步的计算,每一个像素点都会有两个值:梯度强度/梯度方向。
现在就计算梯度直方图,这是一个关键步骤也是HOG能够work的原因。
梯度直方图是在一个8*8的cell里面计算的。那么在8*8的cell里面就会有8*8*2=128个值,2是包括了梯度强度和梯度方向。通过统计形成梯度直方图,128个值将会变成9个值,大大降低了计算量,同时又对光照等环境变化更加地robust。
首先,我将0-180度分成9个bins,分别是0,20,40...160。然后统计每一个像素点所在的bin。请看下图:
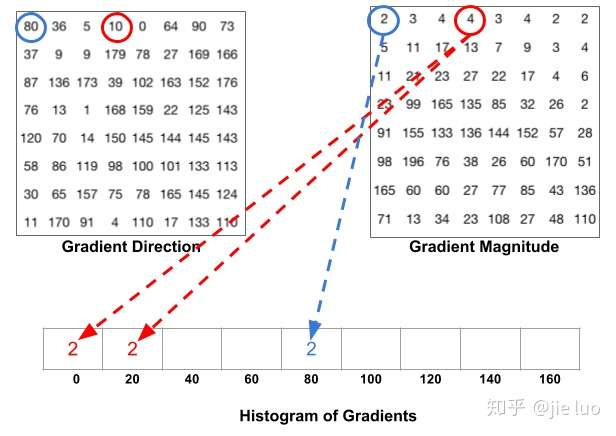
左上图是8*8的梯度方向值,右上图是8*8的梯度强度值,下图是9个bins。
先看两个蓝色圈圈。因为蓝圈的方向是80度,大小是2,所以该点就投给80这个bin;
再看两个红色圈圈。因为红色圈圈的方向是10,大小是4,因为10距离0点为10,距离20点为也为10,那么有一半的大小是投给0这个bin,还有一半的大小(即是2)投给20这个bin。
那么统计完64个点的投票数以后,每个bin就会得到一个数值,可以得到一个直方图,在计算机里面就是一个大小为9的数组。
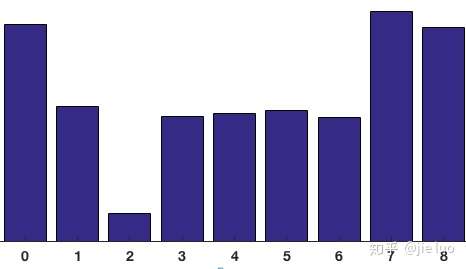
从上图可以看到,更多的点的梯度方向是倾向于0度和160度,也就是说这些点的梯度方向是向上或者向下,表明图像这个位置存在比较明显的横向边缘。因此HOG是对边角敏感的,由于这样的统计方法,也是对部分像素值变化不敏感的,所以能够适应不同的环境。
4. 对16*16大小的block归一化
归一化的目的是降低光照的影响。
归一化的方法是向量的每一个值除以向量的模长。
比如对于一个(128,64,32)的三维向量来说,模长是
那么归一化后的向量变成了(0.87,0.43,0.22)
那么16*16大小的block是怎么来的?
请看下图:
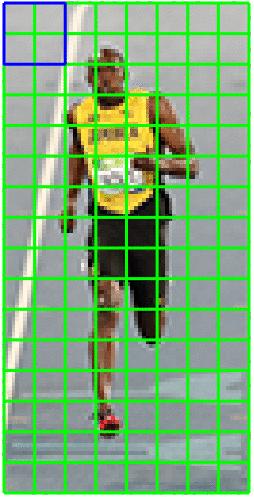
绿色方块是8*8大小的cell,蓝色方块就是由4个cell组成的block。作者提出要对block进行normalize。那么由于一个cell就会有大小为9的vector,四个cell就有36大小的vector。对block进行normalize就是对这大小为36的vector进行归一化。
而每一个block将按照上图篮框移动的方式进行迭代截取。
5.得到HOG特征向量
每一个16*16大小的block将会得到36大小的vector。那么对于一个64*128大小的图像,按照上图的方式提取block,将会有7个水平位置和15个竖直位可以取得,所以一共有7*15=105个block,所以我们整合所有block的vector,形成一个大的一维vector的大小将会是36*105=3780。
得到HOG特征向量,就可以用来可视化和分类了。对于这么大的HOG特征,SVM就排上用场了。
文章就写到这里,谢谢阅读。

