

【线性代数】正交矩阵和格兰姆-施密特正交化
引言
一组线性无关的向量可以张成一个向量子空间,比如向量\(\overrightarrow{e_1} = \left[ \begin{matrix} 1 \\ 2 \end{matrix} \right]\)和\(\overrightarrow{e_2} = \left[ \begin{matrix} 1 \\ 0 \end{matrix} \right]\)。它们线性无关,并且能张成一个二维平面。既然如此,那么为什么我们众所周知的二维坐标系是用\(\overrightarrow{i} = \left[ \begin{matrix} 1 \\ 0 \end{matrix} \right]\)和\(\overrightarrow{j} = \left[ \begin{matrix} 0 \\ 1 \end{matrix} \right]\)表示,明明任意一组线性无关的2维向量都可以表示二维平面。这就引入了今天这篇笔记要讲的正交矩阵,得益于正交矩阵的性质,很多运算都可以被化简。
正交矩阵
之前的笔记中已经提到过正交向量,比如在\(R^n\)空间中两个n维向量\(\overrightarrow{e_1}、\overrightarrow{e_2}\)垂直,称这两个向量正交。而且显然,互为正交的一组向量(除去非零向量)必然线性无关,为此如果将一组n维正交向量放在一个矩阵中,比如$$A=
\begin{equation}
\left[
\begin{matrix}
e1 \ e2
\end{matrix}
\right]
\end{equation}
\begin{equation}
A^TA=\left[
\begin{matrix}
e1 \ e2
\end{matrix}
\right]\left[
\begin{matrix}
e1 \ e2
\end{matrix}
\right]=D
\end{equation}
\begin{equation}
A^TA=I
\end{equation}
\begin{equation}
\left {
\begin{array}{lr}
Q^TQ=I \
QT=Q
\end{array}
\right.
\end{equation}
\left[
\begin{matrix}
1 & 0 \
0 & 1
\end{matrix}
\right]
\frac{1}{2}\left[
\begin{matrix}
1 & 1 & 1 & 1\
1 & -1 & 1 & -1\
1 & 1 & -1 & -1\
1 & -1 & -1 & 1
\end{matrix}
\right]
第一步:正交化
矩阵\(A\)中包含两个列向量,\(\overrightarrow{e_1} = \left[ \begin{matrix} 3 \\ 4 \end{matrix} \right]\)和\(\overrightarrow{e_2} = \left[ \begin{matrix} 2 \\ 1 \end{matrix} \right]\)
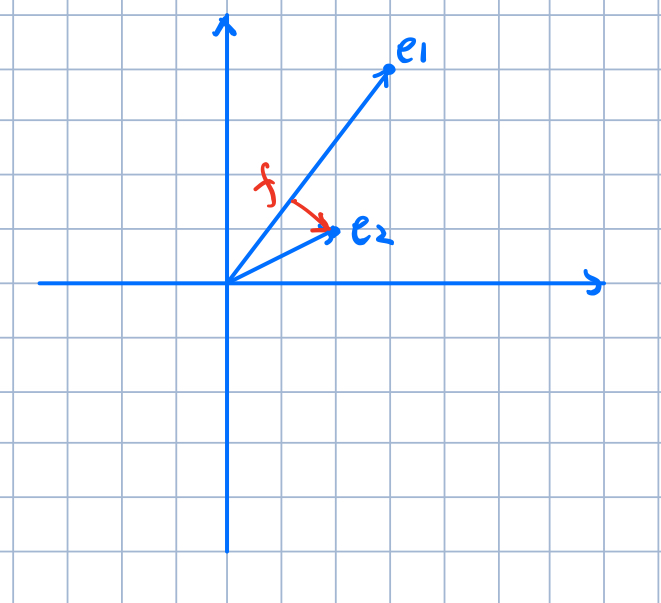
我们希望转化后的2个列向量正交,那么我可以从原来的2个列向量中先任取一个向量比如\(\overrightarrow{e_1} = \left[ \begin{matrix} 3 \\ 4 \end{matrix} \right]\)固定为\(\overrightarrow{q_1}\),那么剩下的目标就是将另外一个向量\(\overrightarrow{e_2}\)转化为与\(\overrightarrow{q_2}\),令它与\(\overrightarrow{q_1}\)正交。所以,我们先来写出正交化的第一步,即确定一个"固定"向量$$
\begin{equation}
\overrightarrow{q_1} = \overrightarrow{e_1}
\end{equation}
\begin{equation}
\overrightarrow{q_2} = \overrightarrow{e_2} - \overrightarrow{f},\ \ 其中\overrightarrow{f}为\overrightarrow{e_2}往\overrightarrow{q_1}的投影向量
\end{equation}
\begin{equation}
f = \frac{e_1{\mathrm{T}}e_2}{e_1{\mathrm{T}}e_1}e_1
\end{equation}
\begin{equation}
q_2 = e_2 - \frac{q_1{\mathrm{T}}e_2}{q_1{\mathrm{T}}q_1}q_1
\end{equation}
A' = \left[
\begin{matrix}
3 & \frac{4}{5} \
4 & \frac{-3}{5}
\end{matrix}
\right]
\frac{1}{\sqrt{32+42}}\left[
\begin{matrix} 3 \ 4
\end{matrix}
\right]=\left[
\begin{matrix} \frac{3}{5} \ \frac{4}{5}
\end{matrix}
\right]
Q = \left[
\begin{matrix}
\frac{3}{5} & \frac{4}{5} \
\frac{4}{5} & \frac{-3}{5}
\end{matrix}
\right]
- 第三步:将第3个向量\(e_3\)减去\(q_1\)方向上的投影向量,再减去\(q_2\)方向上的投影向量,即$$q_3=e_3 - \frac{q_1{\mathrm{T}}e_3}{q_1{\mathrm{T}}q_1}q_1 - \frac{q_2{\mathrm{T}}e_3}{q_2{\mathrm{T}}q_2}q_2$$
接下来单位化即可,不过多赘述。觉得第3步有些抽象的朋友可以找3只笔试一下,两只笔垂直放置在平面上,第3只笔与平面呈一定角度。这样减去两个方向的投影向量后,一定能得到垂直与平面的一个向量。而且也可以通过\(q_3^Tq_2=0\)和\(q_3^Tq_1=0\)来验证。
