EM 算法和高斯混合模型
EM 算法是一种迭代算法,1977 年由 Dempster 等人总结提出,用于含隐变量(hidden variable)的概率模型参数的极大似然估计,或极大后验概率估计。EM 算法的每次迭代由两步组成:E 步,求期望(expectation); M 步,求极大(maximization)。所以这一算法称为期望极大算法(expectation maximization algorithm),简称 EM 算法。
1 EM 算法
1.1 预备知识
(1) 观测变量和隐变量
概率模型有时候既含有观测变量(observable variable),又含有隐变量或潜在变量(latent variable)。如果概率模型的变量都是观测变量,那么给定数据,可以直接用极大似然估计法,或贝叶斯估计法估计模型参数。但是,当模型含有隐变量时,就不能简单地使用这些估计方法。
(2)完全数据和不完全数据
用 \(Y\) 表示观测随机变量的数据,\(Z\) 表示隐随机变量的数据。\(Y\) 和 \(Z\) 连在一起成为完全数据(complete-data),观测数据 \(Y\) 又称为不完全数据(incomplete-data)。假设给定观测数据 \(Y\),其概率分布是 \(P(Y|\theta)\),其中 \(\theta\) 是需要估计的模型参数,那么不完全数据 \(Y\) 的似然函数是 \(P(Y|\theta)\),对数似然函数 \(L(\theta) = \log P(Y|\theta)\);假设 \(Y\) 和 \(Z\) 的联合概率分布是 \(P(Y, Z|\theta)\),那么完全数据的对数似然函数是 \(\log P(Y, Z|\theta)\)。EM 算法通过迭代求 \(L(\theta) = \log P(Y|\theta)\) 的极大似然估计。每次迭代包含两步:E 步:求期望;M 步,求极大化。
(3)Jensen 不等式
当 \(f(x)\) 为凸函数(这里指下凸函数,有的教材凹凸的定义不同)时,有Jensen 不等式(也称詹森不等式、琴生不等式),
可以作一个很直观的解释(如下图),比如说在二维空间上,凸函数是一个开口向上的抛物线,假如我们有两个点 \(a, b\),那么 \(f(E[x])\) 表示的是两个点的均值的纵坐标,而 \(E[f(x)]\) 表示的是两个点纵坐标的均值。
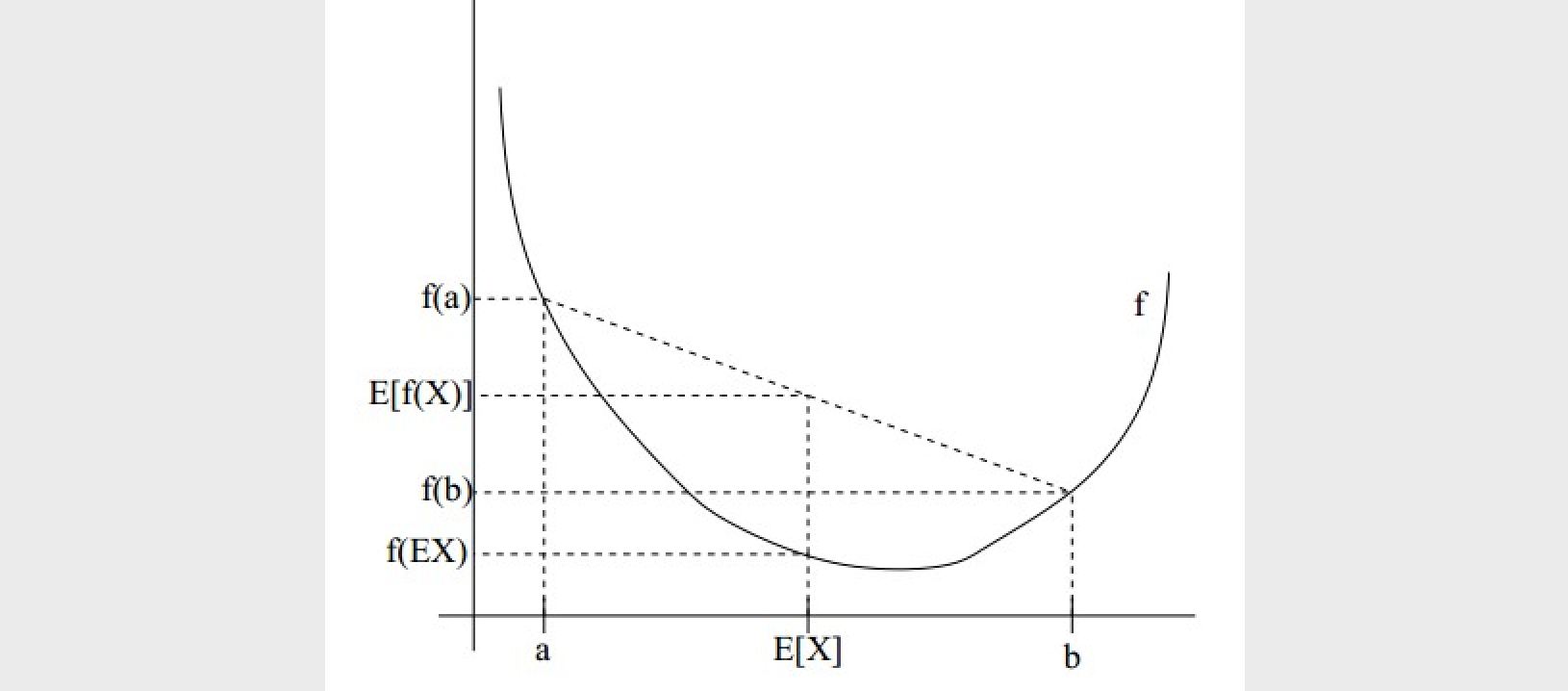
当函数 \(f(x)\) 为对数函数(\(\log\),为凹函数,或上凸函数)时,上面的公式刚好反过来,即
1.2 EM 算法的引入
例(三硬币模型) \(\quad\) 假设有 3 枚硬币,分别记作 \(A, B, C\)。这些硬币正面出现的概率分别是 \(\pi, p, q\)。进行如下掷硬币实验:先掷硬币 \(A\),根据其结果选出硬币 \(B\) 或硬币 \(C\),正面选硬币 \(B\),反面选硬币 \(C\);然后掷选出的硬币,掷硬币的结果,出现正面记作 1,出现反面记作 0;独立地重复 \(n\) 次试验(这里,\(n=10\)),观测结果如下:
假设只能观测到掷硬币的结果,不能观测掷硬币的过程。问如何估计三硬币正面出现的概率,即三硬币模型的参数(\((\pi, p, q)\))。
解 \(\quad\) 三硬币模型可以写作
这里,随机变量 \(y\) 是观测变量,表示一次试验观测的结果是 1 或 0;随机变量 \(z\) 是隐变量,表示未观测到的掷硬币 \(A\) 的结果(正面或反面);\(\theta = (\pi, p, q)\) 是模型参数。这一模型是以上数据的生成模型。注意,随机变量 \(y\) 的数据可以观测,随机变量 \(z\) 的数据不可观测。
将观测数据表示为 \(Y=(Y_1, Y_2, \cdots, Y_n)^T\),未观测数据表示为 \(Z=(Z_1, Z_2, \cdots, Z_n)^T\),则观测数据的似然函数为
即
考虑求模型参数 \(\theta = (\pi, p, q)\) 的极大似然估计,即
这个问题没有解析解,只有通过迭代的方法求解。EM 算法就是可以用于求解这个问题的一种迭代算法。
1.3 算法(EM 算法)
EM 算法
输入:观测变量数据 \(Y\),隐变量数据 \(Z\),联合分布 \(P(Y, Z|\theta)\),条件分布 \(P(Z|Y, \theta)\);
输出:模型参数 \(\theta\)。
(1)选择参数初值 \(\theta^{(0)}\),开始迭代;
(2)E 步:记 \(\theta^{(i)}\) 为第 \(i\) 次迭代参数 \(\theta\) 的估计值,在第 \(i+1\) 次迭代的 \(E\) 步,计算
这里,\(P(Z|Y, \theta^{(i)})\) 是在给定观测数据 \(Y\) 和当前的参数估计 \(\theta^{(i)}\) 下隐变量数据 \(Z\) 的条件概率分布;
(3)M 步:求使 \(Q(\theta, \theta^{(i)})\) 极大化的 \(\theta\),确定第 \(i+1\) 次迭代的参数的估计值 \(\theta^{(i+1)}\)
(4)重复第(2)和第(3)步,直到收敛。
上式的函数 \(Q(\theta, \theta^{(i)})\) 是 EM 算法的核心,称为 \(Q\) 函数(\(Q\) function)。
定义(Q 函数) \(\quad\) 完全数据的对数似然函数 \(\log P(Y, Z|\theta)\) 关于在给定观测数据 \(Y\) 和当前参数 \(\theta^{(i)}\) 下对未观测数据 \(Z\) 的条件概率分布 \(P(Z|Y, \theta^{(i)})\) 的期望称为 \(Q\) 函数,即
下面对 EM 算法作几点说明:
步骤(1):参数的初值可以任意选择,但需注意 EM 算法对初值是敏感的。
步骤(2):E 步求 \(Q(\theta, \theta^{(i)})\) 。\(Q\) 函数式中 \(Z\) 是未观测数据,\(Y\) 是观测数据。注意,\(Q(\theta, \theta^{(i)})\) 的第 1 个变元表示要极大化的参数,第 2 个变元表示参数的当前估计值。每次迭代实际在求 \(Q\) 函数及其极大。
步骤(3):M 步求 \(Q(\theta, \theta^{(i)})\) 的极大化,得到 \(\theta^{(i+1)}\),完成一次迭代 \(\theta^{(i)} \rightarrow \theta^{(i+1)}\)。后面将证明每次迭代使似然函数增大或达到局部极值。
步骤(4):给出停止迭代的条件,一般是对较小的 \(\epsilon_1, \epsilon_2\),若满足
则停止迭代。
1.4 EM 算法的导出(\(Q(\theta, \theta^{(i)})\) 函数的由来)
面对一个含有隐变量的概率模型,目标是极大化观测数据(不完全数据)\(Y\) 关于参数 \(\theta\) 的对数似然函数,即极大化
这一极大化的主要困难是上式中有未观测数据并有包含和(或积分)的对数。
事实上,EM 算法是通过迭代逐步近似极大化 \(L(\theta)\) 的。假设在第 \(i\) 次迭代后 \(\theta\) 的估计值是 \(\theta^{(i)}\)。我们希望新估计值 \(\theta\) 能使 \(L(\theta)\) 增加,即 \(L(\theta) > L(\theta^{(i)})\),并逐步达到极大值。为此,考虑两者的差:
利用 Jensen 不等式(Jensen inequality)得到其下界:
令
则
即函数 \(B(\theta, \theta^{(i)})\) 是 \(L(\theta)\) 的一个下界,而且由上式可知,
因此,任何可以使 \(B(\theta, \theta^{(i)})\) 增大的 \(\theta\),也可以使 \(L(\theta)\) 增大。为了使 \(L(\theta)\) 有尽可能大的增长,选择 \(\theta^{(i+1)}\) 使 \(B(\theta, \theta^{(i)})\) 达到极大,即
假设当前对于 \(L(\theta)\) 中参数 \(\theta\) 的取值为 \(\theta^{(i)}\),求得 \(\theta^{(i+1)}\) 后,有
可见,\(L(\theta)\) 确实是在逐步增大。
现在求 \(\theta^{(i+1)}\) 的表达式,省去对 \(\theta\) 的极大化而言是常数的项,有
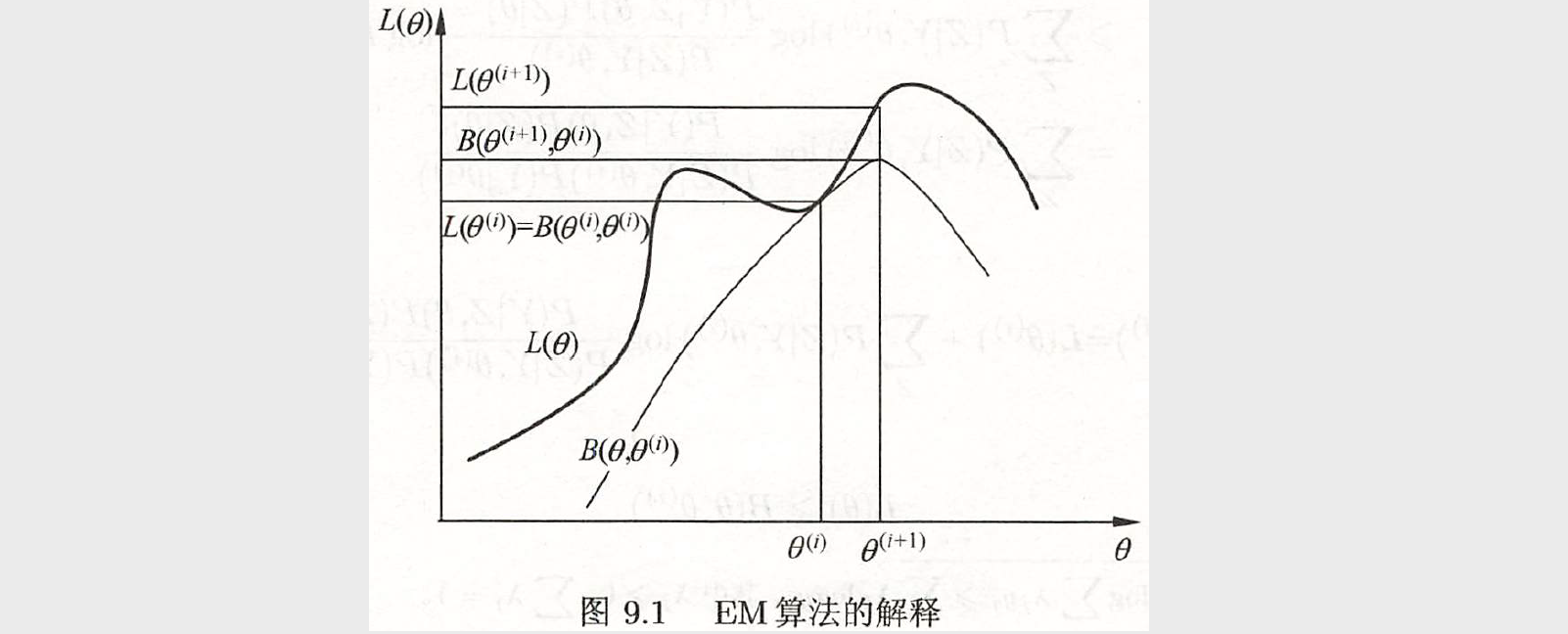
下图给出 EM 算法的直观解释,\(B(\theta, \theta^{(i)})\) 为对数似然函数 \(L(\theta)\) 的下界。两个函数在点 \(\theta = \theta^{(i)}\) 处相等。由上面的式子,EM 算法找到下一个点 \(\theta^{(i+1)}\) 使函数 \(B(\theta, \theta^{(i)})\) 极大化,也是函数 \(Q(\theta, \theta^{(i)})\) 极大化。这时由于 \(L(\theta) \ge B(\theta, \theta^{(i)})\),函数 \(B(\theta, \theta^{(i)})\) 的增加,保证对数似然函数 \(L(\theta)\) 在每次迭代中也是增加的。EM 算法在点 \(\theta^{(i+1)}\) 重新计算 \(Q\) 函数值,进行下一次迭代。在这个过程中,对数似然函数 \(L(\theta)\) 不断增大。从图可以推断出 EM 算法不能保证找到全局最优值。
2 高斯混合模型(Gaussian mixture model, GMM)
高斯混合模型是一种常见的聚类算法,EM 算法的一个重要应用是高斯混合模型的参数估计。
2.1 高斯混合模型定义
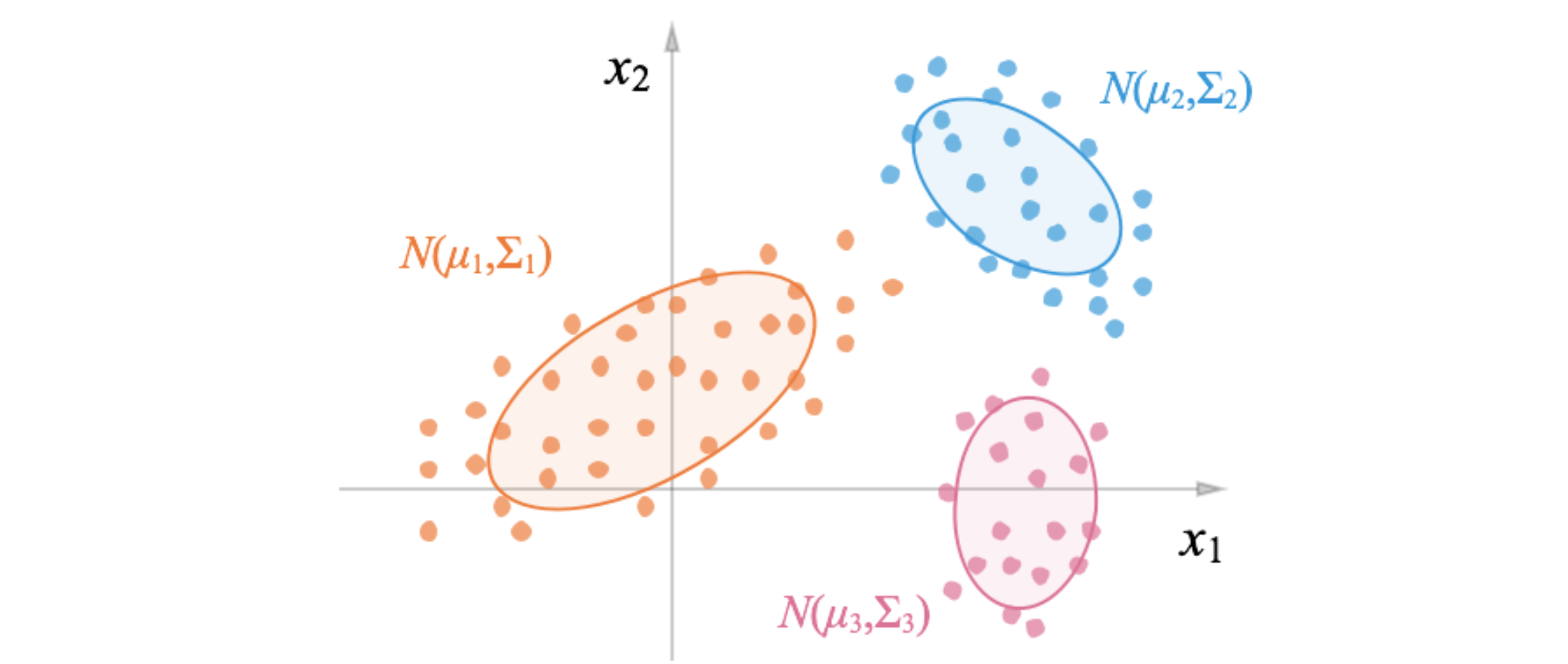
定义(高斯混合模型) \(\quad\) 高斯混合模型是指具有如下形式的概率分布模型:
其中,\(\alpha_k \ge 0\),\(\sum_{k=1}^{K} \alpha_k = 1\);\(\phi(y|\theta_k)\) 是高斯分布密度,\(\theta_k = (\mu_k, \sigma_k^2)\),
称为第 \(k\) 个分模型。
一般混合模型可以由任意概率分布密度函数代替高斯分布密度函数。
2.2 高斯混合模型参数估计的 EM 算法
假设观测数据 \(y_1, y_2, \cdots, y_N\) 由高斯混合模型生成,
其中,\(\theta = (\alpha_1, \alpha_2, \cdots, \alpha_K; \theta_1, \theta_2, \cdots, \theta_K)\)。下面我们用 EM 算法估计高斯混合模型的参数 \(\theta\)。
1. 明确隐变量,写出完全数据的对数似然函数
可以设想观测数据 \(y_j, j=1, 2, \cdots, N,\) 是这样产生的:(1)首先依概率 \(\alpha_k\) 随机选择第 \(k\) 个高斯分布模型 \(\phi(y|\theta_k)\),(2)然后依第 \(k\) 个分模型的概率分布 \(\phi(y|\theta_k)\) 生成观测数据 \(y_j\)。
这时观测数据 \(y_j, j=1, 2, \cdots, N\) 是已知的;反映观测数据 \(y_j\) 来自第 \(k\) 个分模型的数据是未知的,\(k=1, 2, \cdots, K\),以隐变量 \(\gamma_{jk}\) 表示,其定义如下:
\(j=1, 2, \cdots, N; \ k = 1, 2, \cdots, K\),\(\gamma_{jk}\) 是 0-1 随机变量。
有了观测数据 \(y_j\) 及未观测数据 \(\gamma_{jk}\),那么完整数据是
于是可以写出完全数据的似然函数,一组完全数据 \((y_j, \gamma_{j1}, \gamma_{j2}, \cdots, \gamma_{jK})\) 的似然函数为
整个完全数据集 \((y, \gamma)\) 的似然函数为
那么完全数据的对数似然函数为
2. EM 算法的 E 步:确定 \(Q\) 函数
定义(响应度) \(\quad\) 计算 \(E(\gamma_{jk} | y, \theta)\),记为 \(\hat{\gamma}_{jk}\)
\(\hat{\gamma}_{jk}\) 是在当前模型参数下第 \(j\) 个观测数据来自第 \(k\) 个分模型的概率,称为分模型 \(k\) 对观测数据 \(y_j\) 的响应度。
将 \(\hat{\gamma}_{jk}\) 带入上面 \(Q(\theta, \theta^{(i)})\),即得
3. 确定 EM 算法的 M 步
迭代的 M 步是求函数 \(Q(\theta, \theta^{(i)})\) 对 \(\theta\) 的极大值,即求新一轮迭代的模型参数:
用 \(\hat{\mu}_k, \hat{\sigma}_k\) 及 \(\hat{\alpha}_k, k = 1, 2, \cdots, K\),表示 \(\theta^{(i+1)}\) 的各参数,在求解过程中,同时需要满足 \(\sum_{k=1}^{K} \alpha_k = 1\),于是有:
采用拉格朗日乘子法,有
对 \(\mu_k, \sigma_k^2\) 和 \(\alpha_k\) 求偏导数并令其为 0,得
参数 \(\hat{\alpha}_k\) 的详细推导:
\[\frac{\partial{L(\theta)}}{\partial{\alpha_k}} = \frac{\sum_{j=1}^{N} \hat{\gamma}_{jk}}{\alpha_k} + \lambda = 0 \]于是有
\[\sum_{j=1}^{N} \hat{\gamma}_{jk} + \lambda \alpha_k = 0 \]等式两边同时对 \(k\) 求和
\[\sum_{k=1}^{K}\sum \limits_{j=1}^{N} \hat{\gamma}_{jk} + \lambda \sum_{k=1}^{K}\alpha_k = 0 \]得
\[N + \lambda = 0 \]因此有
\[\hat{\alpha}_k = \frac{\sum \limits_{j=1}^{N} \hat{\gamma}_{jk}}{N} \]
重复以上计算,知道对数似然函数值不再有明显的变化为止。
算法(高斯混合模型参数估计的 EM 算法)
输入: 观测数据 \(y_1, y_2, \cdots, y_N\),高斯混合模型;
输出:高斯混合模型参数。
(1)取参数的初始值开始迭代;
(2)E 步:依据当前模型参数,计算分模型 \(k\) 对观测数据 \(y_j\) 的响应度
(3)M 步:计算新一轮迭代的模型参数
(4)重复第(2)步和第(3)步,知道收敛。
3 高斯混合模型的应用
3.1 AIC 和 BIC
待补充
3.2 高斯混合模型用于聚类
# 导入模块
import numpy as np
from sklearn.datasets import make_blobs
from sklearn.mixture import GaussianMixture
import matplotlib.pyplot as plt
# 生成数据
X, y = make_blobs(n_samples=300, centers=4, cluster_std=0.60, random_state=0)
确定簇的数量:
n_components = np.arange(1, 21)
models = [GaussianMixture(n, covariance_type='full', random_state=0).fit(X) for n in n_components]
# plt.figure(figsize=(8, 6))
plt.plot(n_components, [m.bic(X) for m in models], label='BIC')
plt.plot(n_components, [m.aic(X) for m in models], label='AIC')
plt.legend(loc='best')
plt.xticks(range(0, 22))
plt.xlabel('n_components')
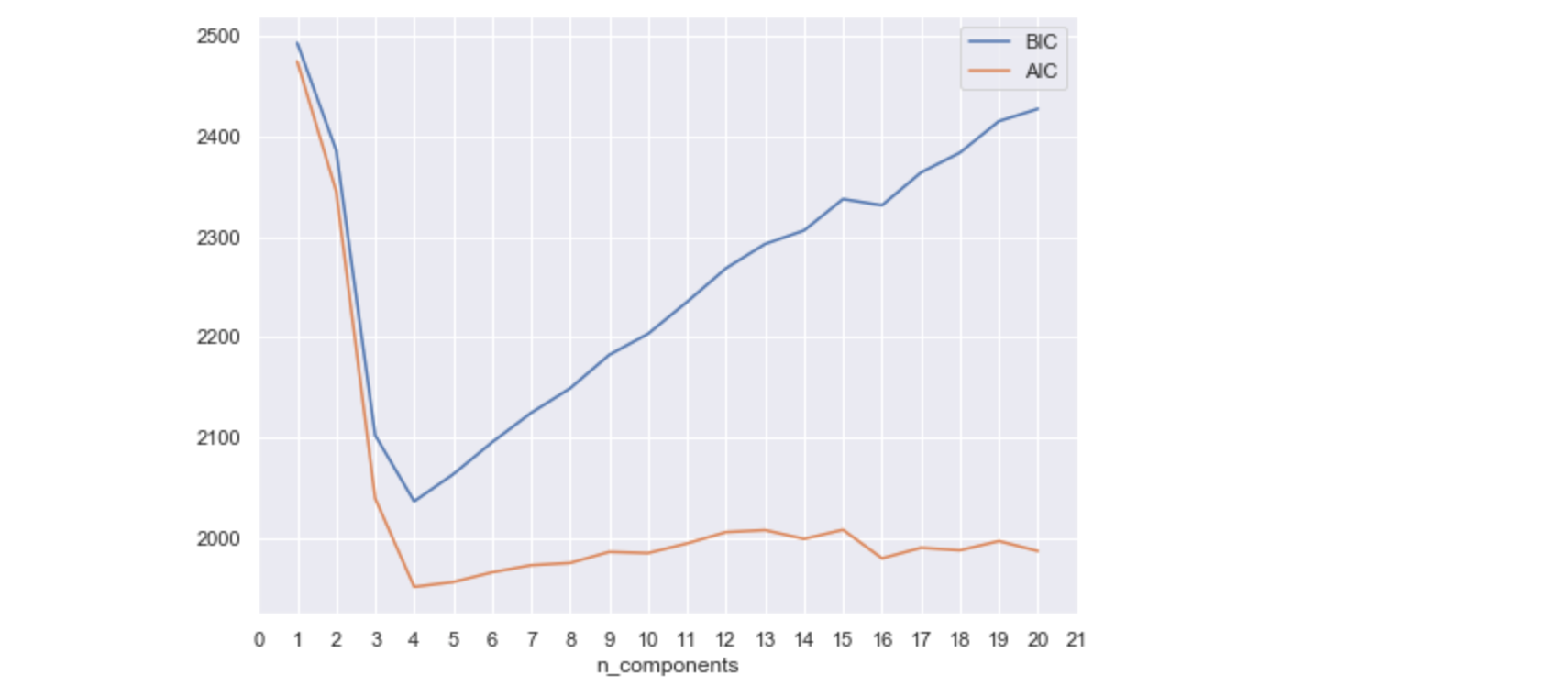
我们使用最佳聚类数(在这种情况下为4)训练模型,并将聚类结果和原始数据进行对比:
gmm = GaussianMixture(n_components=4, init_params='kmeans') # 参数初始化方法
gmm.fit(X)
y_pred = gmm.predict(X)
figure, axes = plt.subplots(1, 2, figsize=(10, 4), dpi=100)
axes[0].scatter(X[:,0], X[:,1], c=y, cmap='rainbow')
axes[0].set_title("original clusters")
axes[1].scatter(X[:,0], X[:,1], c=y_pred, cmap='rainbow')
axes[1].set_title("GMM clusters")
plt.show()

3.3 高斯混合模型和 K-Means 的异同
高斯混合模型与 K-Means 算法的相同点是:
(1)它们都是可用于聚类的算法;
(2)都需要指定 K 值;
(3)都是使用 EM 算法来求解;
(4)都往往只能收敛于局部最优。
而它相比于 K 均值算法的优点是:
(1)可以给出一个样本属于某类的概率是多少;
(2)不仅仅可以用于聚类,还可以用于概率密度的估计;
(3)并且可以用于生成新的样本点。
参考
- 《统计学习方法》 李航
- 高斯混合模型(Gaussian Mixture Model)与EM算法原理
- 如何通俗的理解高斯混合模型(Gaussian Mixture Models)
- 《百面机器学习》

 浙公网安备 33010602011771号
浙公网安备 33010602011771号