【安装】Ubuntu20.04下安装ROS的完整过程(内含已装好ROS的虚拟机、虚拟机创建过程、ROS安装过程及全过程录屏)
现成的虚拟机
为方便大家学习,如果安装ROS遇到的问题实在太多,也可以直接下载我提供给大家的、已经安装好ROS的Ubuntu虚拟机:下载链接, 提取码:1030。
虚拟机的使用说明也在这个文件夹下,虚拟机密码是3edcxsw2。
参考博客
全过程录屏(虽然貌似没有必要就是说):
https://www.bilibili.com/video/BV1du411d7ho?p=3
步骤
0 安装之前先快照!
【重要!非常重要!】安装之前先快照,以防万一。
1 更换软件源
①更换总的软件源
PS:视频里没有这一步。这一步是为了防止后期对
cn.archieve.com的部分文件访问出错(实在有太多小伙伴反馈他们在第五步下载ros-noetic-desktop-full的时候出现连接cn.archieve.com失败啦!)。
如果不更换总的软件源,只更换ROS软件源(像视频里那样),有时候也是不会出问题的。
Ubuntu20.04用的是focal,如果是其他版本,要将focal替换成其他的,比如Ubuntu18.04的bionic。
换成阿里云的,点击查看阿里云官方换源教程:
sudo sh -c 'echo "deb http://mirrors.aliyun.com/ubuntu/ focal main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu/ focal-security main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main multiverse restricted universe
deb-src http://mirrors.aliyun.com/ubuntu/ focal main multiverse restricted universe
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main multiverse restricted universe
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main multiverse restricted universe
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main multiverse restricted universe
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main multiverse restricted universe" > /etc/apt/sources.list'
②更换ROS软件源
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
中科大的(慎用,2022年1月15日~1月22日据小伙伴们反应,解析不了cn.archive.ubuntu.com):
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2 密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3 添加一个公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
4 更新软件源
sudo apt update
错误1:Err: impish
Ign:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu impish InRelease
Err:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu impish Release
404 Not Found [IP: 101.6.15.130 80]
正常情况Ubuntu20.04对应的DISTRIB_CODENAME是focal而不是impish,impish对应的版本是Ubuntu21.10,请检查你下载的Ubuntu镜像是否是Ubuntu20.04。
并且,据我了解的信息,Noetic是ROS1发行版的最后一个版本,而且尚未开发支持Ubuntu21.10的ROS版本,如果需要降级下载,请将/etc/apt/sources.list.d/ros-latest.list中的impish修改为focal,再重新更新软件源尝试。
(具体行不行我没试过,如果Ubuntu21.10没有大改的话应该没得问题)。
5 安装ROS
sudo apt install ros-noetic-desktop-full
可能遇到以下错误:
错误1:如下图cn.archive.ubuntu.com连接失败,然后无法下载。
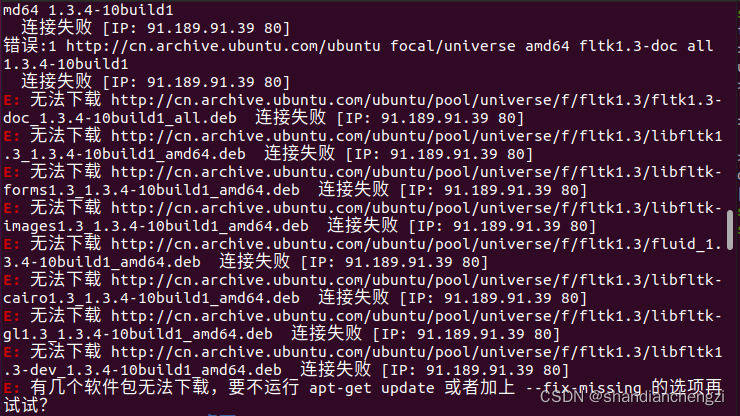
请看第一步更换软件源,把/etc/apt/sources.list的软件源换成阿里云的:
sudo sh -c 'echo "deb http://mirrors.aliyun.com/ubuntu focal main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu focal-updates main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu focal-security main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu focal-proposed main multiverse restricted universe
deb http://mirrors.aliyun.com/ubuntu focal-backports main multiverse restricted universe" > /etc/apt/sources.list'
然后再执行一次sudo apt update,再重新执行:
sudo apt install ros-noetic-desktop-full
6 初始化rosdep
sudo rosdep init
可能遇到以下错误:
错误1:找不到命令
sudo apt install python3-rosdep2
错误2:请求超时
方案1:自定义域名解析
sudo gedit /etc/hosts
追加199.232.28.133 raw.githubusercontent.com
方案2:修改timed out的时间。
sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py
修改DOWNLOAD_TIMEOUT = 15.0的15.0,改大,可为150。
方案3:切换手机热点。
错误3:已存在文件
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
错误4:[Errno 104] Connection reset by peer
你或许正在进行rosdep update,如果尝试过以上所有解决办法都无效,这一步可以跳过。
7 根据rosdep列表更新。(可跳过)
rosdep update
若出现错误,按sudo rosdep init(上一步)出错处理。
8 设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
使环境变量生效
source ~/.bashrc
9 安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
10 测试
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
错误1:
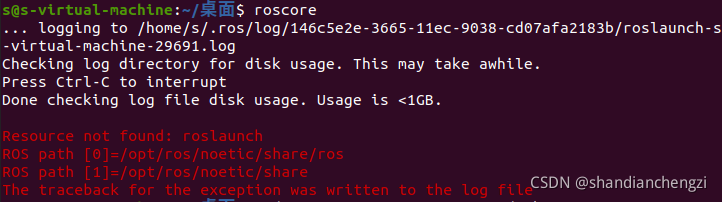
之前安装不够全,再次:
sudo apt install ros-noetic-desktop-full
直到全装好。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 【自荐】一款简洁、开源的在线白板工具 Drawnix