【ROS】4.1 Turtlebot3仿真Waffle循线跟踪
原视频
本节内容较多,
请根据左侧目录针对性阅读。
一、准备工作
-
这一章我们先用gazebo仿真做,不使用真小车,使用的是Waffle模型。
需要下载的库gazebo-ros、turtlebot3_simulations。
如果下载过程中显示虚拟机又连不上网了,暂时切换成NAT模式。以后远程连真小车的时候再改回桥接。注意IP地址的变化。
新建工作空间
# 新建工作空间并初始化
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
# 添加环境变量
source ~/catkin_ws/devel/setup.bash
source ~/.bashrc
功能包程序下载
cd ~/catkin_ws/src/ # 进自己的工作空间的源文件目录
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
# git clone https://gitee.com/YuChuXiang/turtlebot3_simulations.git
git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git
# git clone https://gitee.com/qianlong_workspace/hls_lfcd_lds_driver.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
# git clone https://gitee.com/Walkerxrc/turtlebot3.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
# git clone https://gitee.com/sophtech/turtlebot3_msgs.git
cd ~/catkin_ws && catkin_make
注:最好别用注释里的,因为它更新不及时。
Gazebo下载安装(如果运行提示缺包漏包也重装一下)
注意版本替换(noetic->自己的版本)。
-y参数是默认yes,以免询问“是否继续下载……”
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control -y
sudo apt-get install ros-noetic-turtlebot3-gazebo -y
测试Gazebo是否安装成功
运行:
roslaunch turtlebot3_gazebo turtlebot3_world.launch
成功时显示:

二、测试功能包是否安装成功
1. 测试(如有异常请看2.Gazebo运行异常)
# 启动终端A
roslaunch turtlebot3_gazebo turtlebot3_world.launch
# 另起终端B
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
# 上一条注:键盘控制小车。若gazebo中小车有移动,则说明控制程序正确
# 续注:验证完毕后,结束键盘控制进程(Ctrl+C)
# 在终端B中
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
# 上一条注:启动仿真模拟。若gazebo中小车自主移动,则说明模拟程序正确
# 续注:若gazebo卡住并在A中显示process has died,重复尝试两次。若仍然失败,考虑gazebo运行异常
# 在终端C中
rostopic list
# 上一条注:将会看到/camera/rgb/camera_info和/camera/rgb/image_raw
# 续注:若没有,则检测.bashrc文件中,模型是否为waffle
# 在终端C中
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch
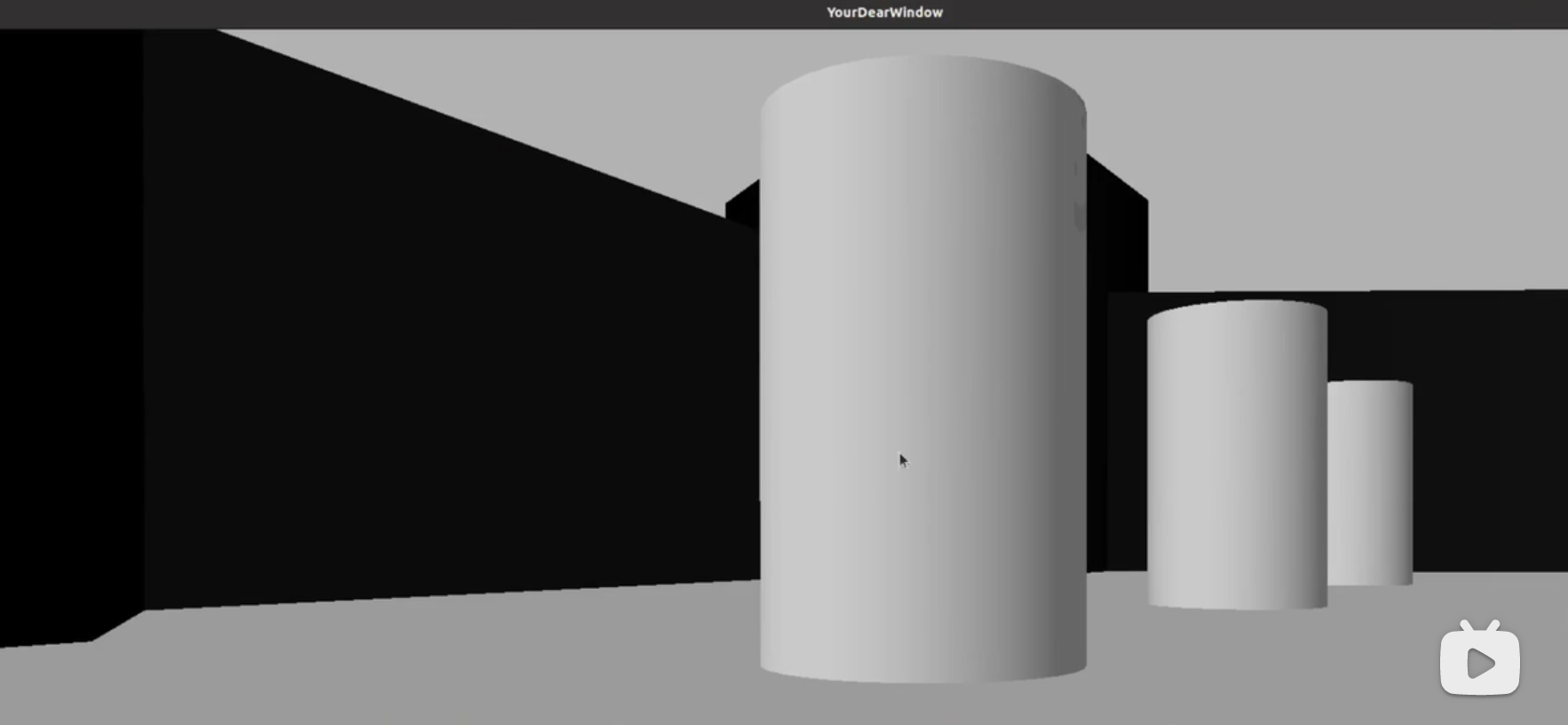
# 上一条注:打开左侧Camera,等待良久后,能看到图二
# 续注:验证完毕后,结束终端B、C的进程(Ctrl+C)
图二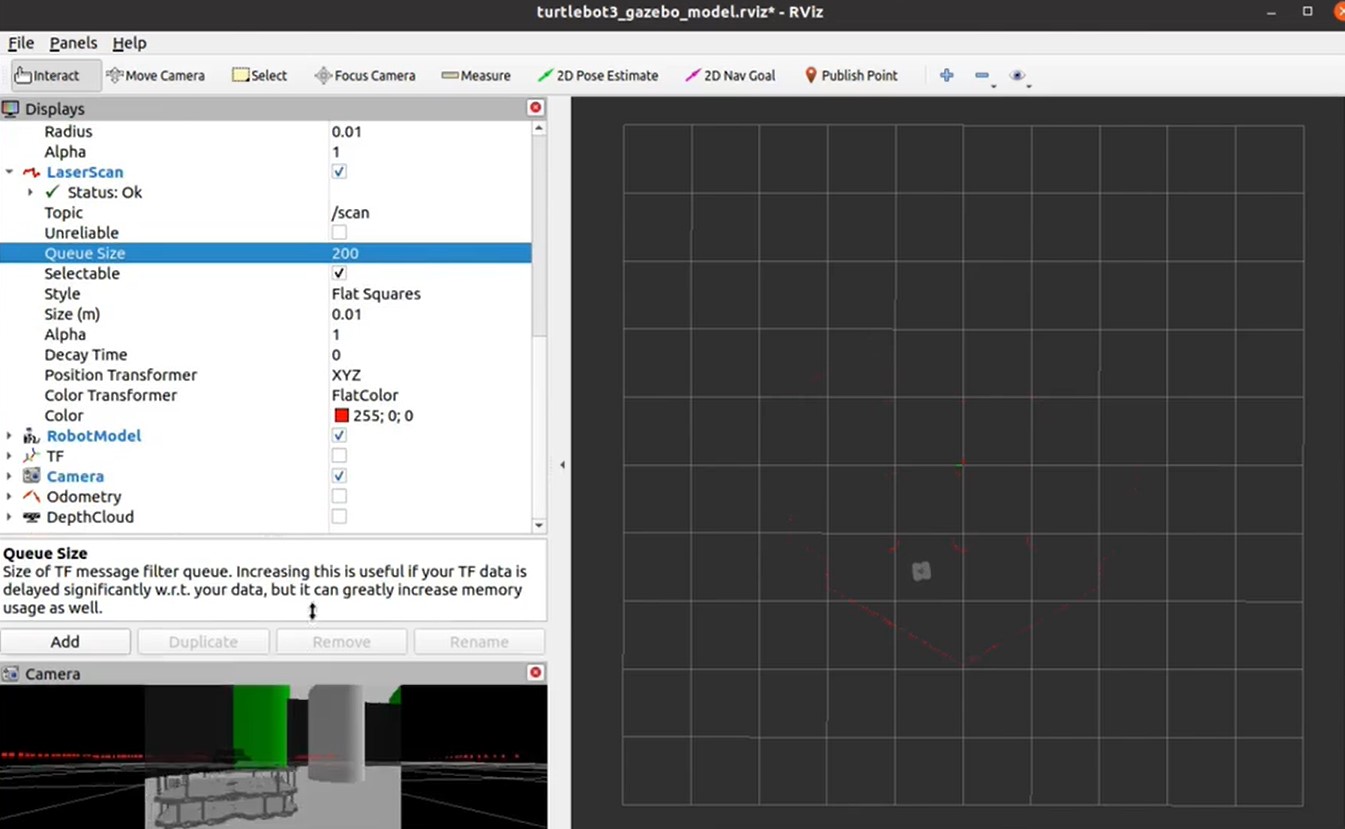
Gazebo运行异常时
gazebo 启动异常以及解决
问题1:RLException: Invalid tag: environment variable 'TURTLEBOT3_MODEL' is not set.
在.bashrc中添加一行配置:
export TURTLEBOT3_MODEL=waffle
意思是选择仿真的模型,为waffle。
问题2:gazebo黑屏
检查~/.gazebo下的models是否安装完成,如果没有安装完成,运行下面的代码。
# 预加载Gazebo模型以免过慢。
cd ~/.gazebo/
# 第一种方案(官网下载,速度较慢):
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
# 第二种方案(下载现成的models):
git clone https://gitee.com/yltzdhbc/gazebo_models
mv gazebo_models models #将下载的文件夹改名为models
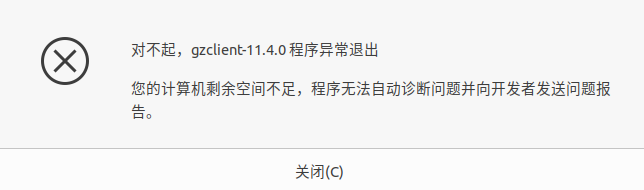
问题3:VMware: vmw_ioctl_command error Invalid argument(无效的参数)
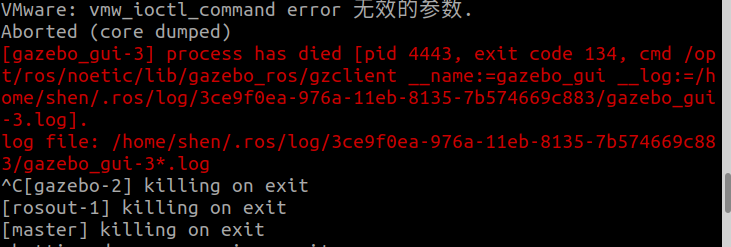
解决:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc
问题4:[Err] [REST.cc:205] Error in REST request
解决:
sudo gedit ~/.ignition/fuel/config.yaml
# 将url : https://api.ignitionfuel.org使用 # 注释掉
# 再添加url: https://api.ignitionrobotics.org
问题5:启动时抛出异常:[gazebo-2] process has died [pid xxx, exit code 255, cmd.....
解决:
killall gzserver
killall gzclient
# 等待一会儿或者重启也行,这个问题仅仅是因为你上一个gazebo没关彻底,残留了点东西,导致新的打不开。
如果还有其他问题再做以下的事情:
除了Ubuntu20.04,尽量不要第一时间尝试更新,可能会越解决越糟糕!
# 添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
# 安装或更新
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install gazebo11
# Ubuntu16.04对应gazebo7,Ubuntu18.04对应gazebo9,下同
sudo apt-get install libgazebo11-dev
三、导入程序并理解作用
直接git clone(也可以手动复制导入)
cd ~/catkin_ws/src
git clone https://gitee.com/shandianchengzi/learning_topic.git # 克隆我已经测试过的程序
cd ~/catkin_ws/ && catkin_make
chmod +x ~/catkin_ws/src/learning_topic/scripts/*.py # 将所有的python程序设置为允许执行的文件
理解程序
在你自己的功能包的src下面(比如我的功能包叫catkin_ws/src/learning_topic)
~/catkin_ws/src/learning_topic/scripts/ # 用于存放python脚本
~/catkin_ws/src/learning_topic/launch/ # 用于存放启动程序(.launch文件)
~/catkin_ws/src/learning_topic/worlds/ # 用于存放gazebo仿真模拟的地图模型(.worlds文件)
01follower.py
源代码
~/catkin_ws/src/learning_topic/scripts/目录下。
#!/usr/bin/env python3
# 若使用的是python2,将第一行改成python2
# 若使用的是python,将第一行改成python
# 之后的程序同理
import rospy
from sensor_msgs.msg import Image # 从传感器图片的库中导入Image数据类型
def image_callback(msg):
pass
rospy.init_node('follower') # 建立结点follower
image_sub = rospy.Subscriber('camera/rgb/image_raw', Image, image_callback)
# 以上括号内分别是 接受的topic名称, 数据类型, 触发的回调函数
rospy.spin()
运行方式
chmod +x 01follower.py
rosrun learning_topic 01follower.py
运行结果
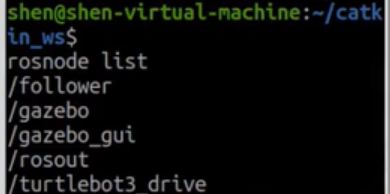
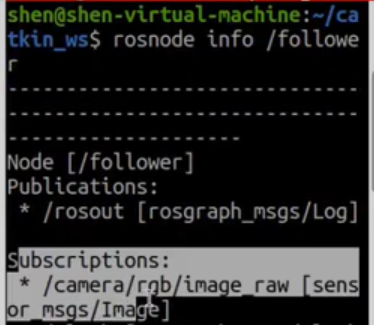
结果是生成了一个名叫'follower'的结点,它订阅了'camera/rgb/image_raw'话题。
可用下列指令检验:
rosnode list # 检查是否出现/follower结点
rosnode info /follower # 如果出现了/follower结点,用这个指令查看/follower结点的详细信息
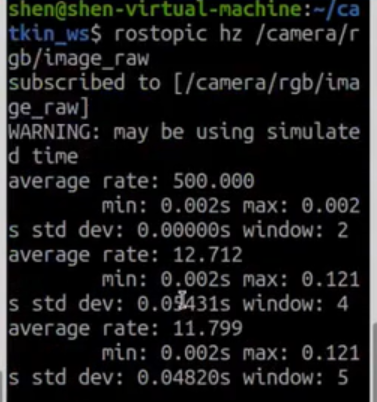
rostopic hz /camera/rgb/image_raw # 不出意外的话,/follower结点订阅的话题是/camera/rgb/image_raw。用这个指令查看话题发布的情况。
检验结果应如下图所示:
02follower_opencv.py
源代码
~/catkin_ws/src/learning_topic/scripts/目录下。
#!/usr/bin/env python3
import rospy
from sensor_msgs.msg import Image
import cv2, cv_bridge # 导入opencv模块和协议模块
def image_callback(msg):
image = bridge.imgmsg_to_cv2(msg,desired_encoding="bgr8")
# 将ros_image通过蓝绿红8位色空间转换为OpenCV图像,结果返回给image,类参数bridge转换函数
if(image.all() == None):
print("Can't get your image, please check your code!")
else :
# print(image.size, image.shape) # 输出图像大小以及形状
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL) # 建立名为showImage的窗口 窗口类为 cv2内置的NORMAL窗口
cv2.imshow("showImage",image[:,:,0]) # 在showImage中显示二维图像
cv2.waitKey(3) # waitkey()延时显示图像,在imshow之后,没有waitkey()函数图像将无法显示
rospy.init_node('follower',anonymous = True) # anonymous 同步选项 每公布一条消息就接受一个消息
bridge = cv_bridge.CvBridge() # 创建CvBridge对象
image_sub=rospy.Subscriber('/camera/rgb/image_raw',Image,image_callback)
# 以上括号内分别是 接受的topic名称, 数据类型, 触发的回调函数
rospy.spin()
运行结果
能看到一个名字叫做showImage的窗口(不是下图的窗口名)。
名为course的model
~/catkin_ws/src/learning_topic/models/目录下。
-
这个model可以在turtlebot3_simulations库中找到。
具体位置是turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace/course。
拷贝到自己的功能包下即可。
-
若想了解model的自定义机制,可以从model的文件组织,以及如何调用model入手。
文件组织的逻辑:参考gazebo中给地面添加纹理,写得很清晰。
文件的调用关系:参考0course.launch、course.world两个文件中的下列部分:
<!-- 0course.launch中 --> <env name="GAZEBO_RESOURCE_PATH" value="$(find learning_topic)/models/turtlebot3_autorace/ground_picture" /> <!-- course.world中 --> <!-- Our ground image --> <include> <uri>model://turtlebot3_autorace/course</uri> <pose> 0 0 0 0 0 -1.54</pose> </include>
course.world
~/catkin_ws/src/learning_topic/worlds/目录下。
<sdf version="1.4">
<world name="default">
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>true</shadows>
</scene>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<!-- Our ground image -->
<include>
<uri>model://turtlebot3_autorace/course</uri>
<pose> 0 0 0 0 0 -1.54</pose>
</include>
<physics type="ode">
<real_time_update_rate>1000.0</real_time_update_rate>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<ode>
<solver>
<type>quick</type>
<iters>150</iters>
<precon_iters>0</precon_iters>
<sor>1.400000</sor>
<use_dynamic_moi_rescaling>1</use_dynamic_moi_rescaling>
</solver>
<constraints>
<cfm>0.00001</cfm>
<erp>0.2</erp>
<contact_max_correcting_vel>2000.000000</contact_max_correcting_vel>
<contact_surface_layer>0.01000</contact_surface_layer>
</constraints>
</ode>
</physics>
</world>
</sdf>
0course.launch
源代码
这个程序需要根据你自己的功能包名字修改一些地方。
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/empty.world"/>改成<arg name="world_name" value="$(find learning_topic)/worlds/course.world"/>。(改成自己的功能包的名字)
~/catkin_ws/src/learning_topic/launch/目录下。
<launch>
<!-- $(find learning_topic)/models/turtlebot3_autorace是你的model文件的路径 -->
<env name="GAZEBO_RESOURCE_PATH" value="$(find learning_topic)/models/turtlebot3_autorace/ground_picture" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="x_pos" default="0.0"/>
<arg name="y_pos" default="0.0"/>
<arg name="z_pos" default="0.0"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<!-- $(find learning_topic)/worlds/course.world是你的world文件的路径 -->
<arg name="world_name" value="$(find learning_topic)/worlds/course.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" />
<!-- 增设一个状态发布结点robot_state_publisher -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model turtlebot3_$(arg model) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" />
</launch>
可以和官方给的turtlebot3_empty_world.launch做对比。
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="x_pos" default="0.0"/>
<arg name="y_pos" default="0.0"/>
<arg name="z_pos" default="0.0"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/empty.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" />
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model turtlebot3_$(arg model) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" />
</launch>
运行方式
理想的文件夹组织结构:
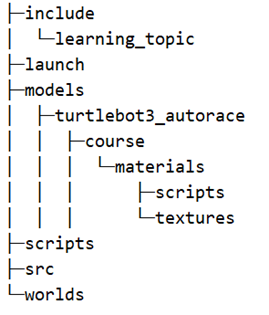
roslaunch learning_topic 0course.launch
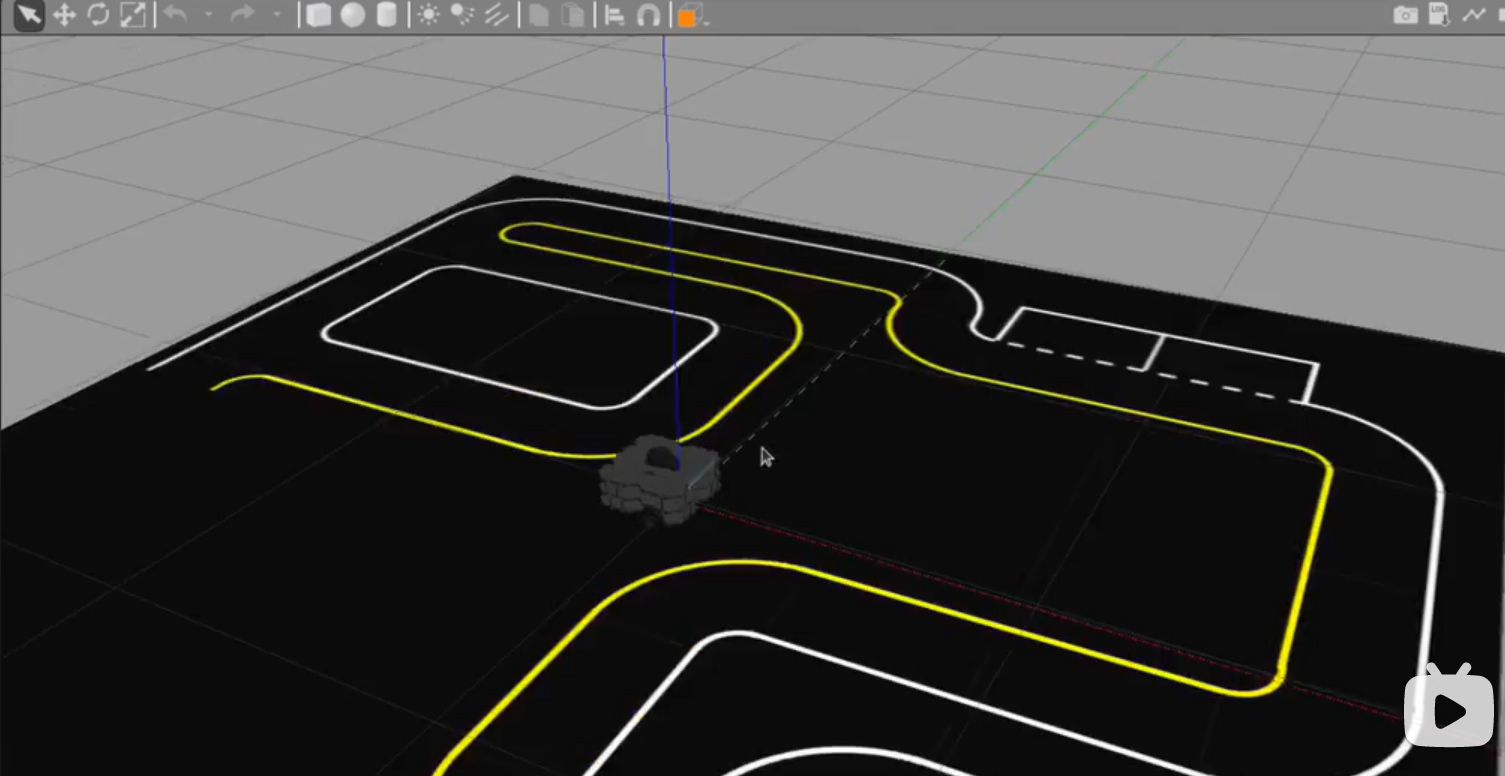
运行结果
03follower_color_filter.py
源代码
~/catkin_ws/src/learning_topic/scripts/目录下。
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2, cv_bridge , numpy
from sensor_msgs.msg import Image
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge() #创建CvBridge对象
self.image_sub=rospy.Subscriber('/camera/rgb/image_raw',Image,self.image_callback)
# 函数变量分别为:接受节点 、 接受消息类型、 回调函数
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg)
if(image.all()!=None):
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 进行消息-> rgb -> hsv格式变量 的两步转换
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
# 建立蒙版参量 参量使用指针格式(inRange函数的要求)
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
masked = cv2.bitwise_and(image,image,mask=mask)
# 使用蒙版进行二值化 bitwise
cv2.namedWindow("showYellowOnly",cv2.WINDOW_NORMAL)
cv2.imshow("showYellowOnly",mask) #进行显示
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
运行结果

04follower_line_finder.py
源代码
~/catkin_ws/src/learning_topic/scripts/目录下。
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2, cv_bridge , numpy
from sensor_msgs.msg import Image
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber(
'/camera/rgb/image_raw',
Image,
self.image_callback )
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg,
desired_encoding='bgr8')
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
# 同Exp4-2相同 不多做介绍
h,w,d= image.shape
top = 3*h/4
bot = top + 20
# 在图像的下3/4处进行切片 注意:image纵向向下为x正向 横向向右为y正向
mask[int(0):int(top),:] = 0
mask[int(bot):int(h),:] = 0
M = cv2.moments(mask)
# moments(): Opencv中用于计算图像中心的函数类 参见Opencv官网
if M['m00']>0:
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image,(cx,cy),20,(0,0,255),-1)
# 对切片之后的图像计算中心,并标记小圆圈
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL)
cv2.imshow("showImage",image)
cv2.namedWindow("findLine",cv2.WINDOW_NORMAL)
cv2.imshow("findLine",mask)
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
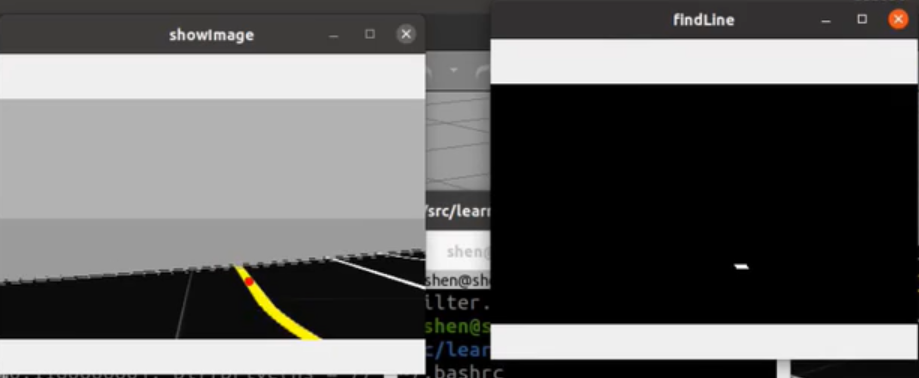
运行结果
注意红点和白点,这是小车即将前往的方向。
05follower_proporation.py
源代码
~/catkin_ws/src/learning_topic/scripts/目录下。
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2S, cv_bridge , numpy
from sensor_msgs.msg import Image
from geometry_msgs.msg import Twist
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber('/camera/rgb/image_raw',Image,self.image_callback)
self.cmd_vel_pub = rospy.Publisher('cmd_vel',Twist,queue_size =1) # 发布话题使小车运动
self.twist =Twist()
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg,desired_encoding='bgr8')
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
h,w,d= image.shape
top = 5*h/6
bot = top + 20
mask[int(0):int(top),:] = 0
mask[int(bot):int(h),:] = 0
#cut the image to a blade
M = cv2.moments(mask)
#class MOMENTS
if M['m00']>0:
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image,(cx,cy),20,(0,0,255),-1)
err = cx-w/2
self.twist.linear.x = 0.15 # 小车的线速度不易设置太快,否则容易脱离跑道
self.twist.angular.z = -float(err)/1000 # 小车运动的角度
self.cmd_vel_pub.publish(self.twist)
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL)
cv2.imshow("showImage",image)
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
运行结果
小车自动沿着黄线前进。(窗口名字应叫做showImage)

order.txt
#-#-# 视频开始时,以下准备工作全部就绪 #-#-#
# sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
# sudo apt-get install ros-noetic-turtlebot3-gazebo
# sudo apt-get install ros-noetic-image-view
# 预加载Gazebo模型以免过慢。
cd ~/.gazebo/
# 第一种方案(官网下载,速度较慢):
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
# 第二种方案(下载现成的models):
git clone https://gitee.com/yltzdhbc/gazebo_models
mv gazebo_models models #将下载的文件夹改名为models
cd ~/catkin_ws/src/
# git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
git clone https://gitee.com/zthcool/turtlebot3_simulations
# git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver
git clone https://gitee.com/hhdang/hls_lfcd_lds_driver
# git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone https://gitee.com/zthcool/turtlebot3
# git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs
git clone https://gitee.com/mieximiemie/turtlebot3_msgs
cd ~/catkin_ws && catkin_make
# 上一条注:一定要等catkin_make执行完!!!不然之后找不到包的时候非常难受
# 未遇到问题时不建议更新
# 添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
# 安装或更新
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install gazebo11
# Ubuntu16.04对应gazebo7,Ubuntu18.04对应gazebo9,下同
sudo apt-get install libgazebo11-dev
# 将小车模型改成waffle
gedit ~/.bashrc
# 将export TURTLEBOT3_MODEL=burger改成export TURTLEBOT3_MODEL=waffle
source ~/.bashrc
#-#-# 视频开始时,以上准备工作全部就绪 #-#-#
#-#-# 测试环境是否正确 #-#-#
# 启动终端A
roslaunch turtlebot3_gazebo turtlebot3_world.launch
# 上一条注:若gazebo正确,应该是能看到下图(见图一)
# 另起终端B
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
# 上一条注:键盘控制小车。若gazebo中小车有移动,则说明控制程序正确
# 续注:验证完毕后,结束键盘控制进程(Ctrl+C)
# 在终端B中
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
# 上一条注:启动仿真模拟。若gazebo中小车自主移动,则说明模拟程序正确
# 续注:若gazebo卡住并在A中显示process has died,重复尝试两次。若仍然失败,考虑gazebo运行异常
# 在终端C中
rostopic list
# 上一条注:将会看到/camera/rgb/camera_info和/camera/rgb/image_raw
# 续注:若没有,则检测.bashrc文件中,模型是否为waffle
# 在终端C中
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch
# 上一条注:打开左侧Camera,如果等待良久后,能看到图像,说明你的仿真非常对
# 续注:验证完毕后,结束终端B、C的进程(Ctrl+C)
#-#-# 测试结束 #-#-#
#-#-# 测试的过程中我要演示一个卡了我一下午的坑 #-#-#
# 注意,出现模型压根加载不了的时候,终端不一定会提示VMware: vmw_ioctl_command error Invalid argument(无效的参数)
# 但是有幸等到进程自然结束的时候,就会出现这一行报错。并且还会提示剩余空间不足。
# 如果有兴趣可以自己去等一会儿试试,这里我不浪费时间了。
# 解决方式:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc
# 更多问题请参考《ROS|⑥Turtlebot3仿真Waffle循线跟踪》
# https://shandianchengzi.gitee.io/2021/04/04/ROS%E5%BE%AA%E7%BA%BF%E8%B7%9F%E8%B8%AA/
#-#-# 演示结束 #-#-#
#-#-# 正式开始循线跟踪 #-#-#
# 注:在windows下编辑文件,并直接拖动到linux虚拟机运行,可能会报错说/r不存在。
# 因为windows和linux的换行是不一样的,所以最好在linux中复制粘贴程序,或者直接拷贝我的程序包。
# 拷贝操作如下:
cd ~/catkin_ws/src
git clone https://gitee.com/shandianchengzi/learning_topic.git # 克隆我已经测试过的程序
cd ~/catkin_ws/ && catkin_make
chmod +x ~/catkin_ws/src/learning_topic/scripts/*.py # 将所有的python程序设置为允许执行的文件
# 下面所有的程序都放在learning_topic功能包下,
# 如果你们的在别的功能包,就把learning_topic改成自己的功能包的名字
---------------01follower.py Beg----------------
#!/usr/bin/env python3
# 若使用的是python2,将第一行改成python2
# 若使用的是python,将第一行改成python
# 之后的程序同理
import rospy
from sensor_msgs.msg import Image # 从传感器图片的库中导入Image数据类型
def image_callback(msg):
pass
rospy.init_node('follower') # 建立结点follower
image_sub = rospy.Subscriber('camera/rgb/image_raw', Image, image_callback)
# 以上括号内分别是 接受的topic名称, 数据类型, 触发的回调函数
rospy.spin()
---------------01follower.py End----------------
rosrun learning_topic 01follower.py # 运行learning_topic功能包中的01follower.py
rosnode list # 如果出现了/follower,恭喜你!!!
rosnode info /follower
rostopic hz /camera/rgb/image_raw # 能看到图片信息的反馈
# 终止01follower
---------------02follower_opencv.py Beg----------------
#!/usr/bin/env python3
import rospy
from sensor_msgs.msg import Image
import cv2, cv_bridge # 导入opencv模块和协议模块
def image_callback(msg):
image = bridge.imgmsg_to_cv2(msg,desired_encoding="bgr8")
# 将ros_image通过蓝绿红8位色空间转换为OpenCV图像,结果返回给image,类参数bridge转换函数
if(image.all() == None):
print("Can't get your image, please check your code!")
else :
# print(image.size, image.shape) # 输出图像大小以及形状
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL) # 建立名为showImage的窗口 窗口类为 cv2内置的NORMAL窗口
cv2.imshow("showImage",image[:,:,0]) # 在showImage中显示二维图像
cv2.waitKey(3) # waitkey()延时显示图像,在imshow之后,没有waitkey()函数图像将无法显示
rospy.init_node('follower',anonymous = True) # anonymous 同步选项 每公布一条消息就接受一个消息
bridge = cv_bridge.CvBridge() # 创建CvBridge对象
image_sub=rospy.Subscriber('/camera/rgb/image_raw',Image,image_callback)
# 以上括号内分别是 接受的topic名称, 数据类型, 触发的回调函数
rospy.spin()
---------------02follower_opencv.py End----------------
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch # 启动仿真模拟
rosrun learning_topic 02follower_opencv.py
# 可以看到showImage窗口,并看到图像在动
# 终止所有终端的进程
# 将turtlebot3_simulation/turtlebot3_gazebo/models全部拷贝到自己的功能包的models文件夹下
cp ~/catkin_ws/src/turtlebot3_simulation/turtlebot3_gazebo/models/* ~/catkin_ws/src/learning_topic/models/
---------------0course.launch Beg----------------
<launch>
<env name="GAZEBO_RESOURCE_PATH" value="$(find learning_topic)/models/turtlebot3_autorace/ground_picture" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="x_pos" default="0.0"/>
<arg name="y_pos" default="0.0"/>
<arg name="z_pos" default="0.0"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find learning_topic)/worlds/course.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model turtlebot3_$(arg model) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" />
</launch>
---------------0course.launch End----------------
# 在自己的功能包下新建worlds文件夹,并自行设置0course.launch的内容
---------------course.world Beg----------------
<sdf version="1.4">
<world name="default">
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>true</shadows>
</scene>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<!-- Our ground image -->
<include>
<uri>model://turtlebot3_autorace/course</uri>
<pose> 0 0 0 0 0 -1.54</pose>
</include>
<physics type="ode">
<real_time_update_rate>1000.0</real_time_update_rate>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<ode>
<solver>
<type>quick</type>
<iters>150</iters>
<precon_iters>0</precon_iters>
<sor>1.400000</sor>
<use_dynamic_moi_rescaling>1</use_dynamic_moi_rescaling>
</solver>
<constraints>
<cfm>0.00001</cfm>
<erp>0.2</erp>
<contact_max_correcting_vel>2000.000000</contact_max_correcting_vel>
<contact_surface_layer>0.01000</contact_surface_layer>
</constraints>
</ode>
</physics>
</world>
</sdf>
---------------course.world End----------------
roslaunch learning_topic 0course.launch
---------------03follower_color_filter.py Beg----------------
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2, cv_bridge , numpy
from sensor_msgs.msg import Image
# 导入模块
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge() #创建CvBridge对象
self.image_sub=rospy.Subscriber('/camera/rgb/image_raw',Image,self.image_callback)
# 函数变量分别为:接受节点 、 接受消息类型、 回调函数
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg)
if(image.all()!=None):
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 进行消息-> rgb -> hsv格式变量 的两步转换
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
# 建立蒙版参量 参量使用指针格式(inRange函数的要求)
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
masked = cv2.bitwise_and(image,image,mask=mask)
# 使用蒙版进行二值化 bitwise
cv2.namedWindow("showYellowOnly",cv2.WINDOW_NORMAL)
cv2.imshow("showYellowOnly",mask) #进行显示
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
---------------03follower_color_filter.py End----------------
---------------04follower_line_finder.py Beg----------------
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2, cv_bridge , numpy
from sensor_msgs.msg import Image
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber(
'/camera/rgb/image_raw',
Image,
self.image_callback )
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg,
desired_encoding='bgr8')
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
# 同Exp4-2相同 不多做介绍
h,w,d= image.shape
top = 3*h/4
bot = top + 20
# 在图像的下3/4处进行切片 注意:image纵向向下为x正向 横向向右为y正向
mask[int(0):int(top),:] = 0
mask[int(bot):int(h),:] = 0
M = cv2.moments(mask)
#moments(): Opencv中用于计算图像中心的函数类 参见Opencv官网
if M['m00']>0:
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image,(cx,cy),20,(0,0,255),-1)
# 对切片之后的图像计算中心,并标记小圆圈
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL)
cv2.imshow("showImage",image)
cv2.namedWindow("findLine",cv2.WINDOW_NORMAL)
cv2.imshow("findLine",mask)
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
---------------04follower_line_finder.py End----------------
---------------05follower_proporation.py Beg----------------
#!/usr/bin/env python3
# 若使用的是python3,将第一行改成python3
import rospy ,cv2, cv_bridge , numpy
from sensor_msgs.msg import Image
from geometry_msgs.msg import Twist
class Follower:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber('/camera/rgb/image_raw',Image,self.image_callback)
self.cmd_vel_pub = rospy.Publisher('cmd_vel',Twist,queue_size =1)
self.twist =Twist()
def image_callback(self,msg):
image = self.bridge.imgmsg_to_cv2(msg,desired_encoding='bgr8')
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_yellow = numpy.array([20,43,46])
upper_yellow = numpy.array([90,255,255])
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
h,w,d= image.shape
top = 5*h/6
bot = top + 20
mask[int(0):int(top),:] = 0
mask[int(bot):int(h),:] = 0
#cut the image to a blade
M = cv2.moments(mask)
#class MOMENTS
if M['m00']>0:
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image,(cx,cy),20,(0,0,255),-1)
err = cx-w/2
self.twist.linear.x = 0.15 #(注:小车的速度不易设置太快,否则容易脱离跑道)
self.twist.angular.z = -float(err)/1000
self.cmd_vel_pub.publish(self.twist)
cv2.namedWindow("showImage",cv2.WINDOW_NORMAL)
cv2.imshow("showImage",image)
cv2.waitKey(3)
rospy.init_node('follower',anonymous = True)
follower = Follower()
rospy.spin()
---------------05follower_proporation.py End----------------


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 【自荐】一款简洁、开源的在线白板工具 Drawnix