二叉查找树(BST)、平衡二叉树(AVL树)
二叉查找树(BST)
特殊的二叉树,又称为排序二叉树、二叉搜索树、二叉排序树。
二叉查找树实际上是数据域有序的二叉树,即对树上的每个结点,都满足其左子树上所有结点的数据域均小于或等于根结点的数据域,右子树上所有结点的数据域均大于根结点的数据域。如下图所示:
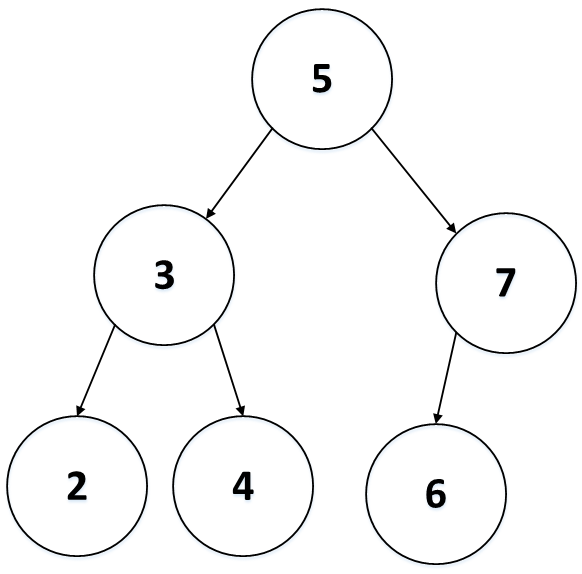
二叉查找树通常包含查找、插入、建树和删除操作。
二叉查找树的创建
对于一棵二叉查找树,其创建与二叉树的创建很类似,略有不同的是,二叉查找树,为了保证整棵树都关于根结点的大小呈左小右大的特征,在创建时,需要根据当前结点的大小来判断插入位置,给出如下代码:
template<typename T> void BSTree<T>::createBSTreeByFile(ifstream &f){ T e; queue<BSNode<T>*> q; while(!f.eof()){ InputFromFile(f, e); Insert(root, e); } } template<typename T> void BSTree<T>::Insert(BSNode<T>* &t, T x){//得用指针的引用,不然传参时由于形参实例化,并不能成功创建二叉树 if(t==NULL){ t = new BSNode<T>; t->data = x; t->lchild = t->rchild = NULL; return; } if(x<=t->data){ Insert(t->lchild, x); } else{ Insert(t->rchild, x); } }
二叉查找树的查找
二叉查找树的查找有递归和非递归两种,对于递归方式,其递归边界为树的终止结点,非递归方式则采取对树中所有结点采取BFS或者DFS进行遍历的方式。
对于非递归方式,给出采取DFS的遍历方式,在这种方式中,通常采用入栈的方式,来访问每个结点,而根据访问的先后顺序,又分为,前序、中序和后序三种遍历方式。以前序遍历为例,通常以根、左、右的顺序访问遍历每个结点,而中序遍历方式,则以左、根、右的顺序遍历,后序则以左右根的顺序来访问。下面给出三种遍历方式的代码:前序遍历:
1 template<typename T> 2 void BSTree<T>::PreOrderTraverse(void(*visit)(BSNode<T>&))const{ 3 stack<BSNode<T>*> s; 4 BSNode<T> *t = root; 5 while(NULL!=t || !s.empty()){ 6 if(NULL!=t){ 7 s.push(t); 8 visit(*t); 9 t = t->lchild; 10 } 11 else{ 12 t = s.top(); 13 s.pop(); 14 t = t->rchild; 15 } 16 } 17 cout<<endl; 18 }
中序遍历:
1 template<typename T> 2 void BSTree<T>::InOrderTraverse(void(*visit)(BSNode<T>&))const{ 3 stack<BSNode<T>*> s; 4 BSNode<T> *q; 5 6 q = root; 7 8 while(!s.empty()||q!=NULL){ 9 if(q!=NULL){ 10 s.push(q); 11 q = q->lchild; 12 } 13 else{ 14 q = s.top(); 15 s.pop(); 16 visit(*q); 17 q = q->rchild; 18 } 19 } 20 cout<<endl; 21 }
后序遍历,对于后序遍历,直接采用入栈的方式进行访问,是不行的,因为根结点被访问两次,无法保证你在弹栈后,对该结点如何操作,因此,需要另设置一个flag参数,来指明该节点是否左右子树都访问过,代码如下,我这里是令定义一个结构体,来实现:
/*结构体部分*/ enum Tags{Left, Right}; template<typename T>struct StackElem { BSNode<T> *p; Tags flag; }; /*后序遍历代码部分*/ template<typename T> void BSTree<T>::PostOrderTraverse(void(*visit)(BSNode<T>&))const{ StackElem<T> se; stack<StackElem<T> > s; BSNode<T> *t; t = root; if(t==NULL){ return; } while(t!=NULL||!s.empty()){ while(t!=NULL){ se.flag = Left; se.p = t; s.push(se); t = t->lchild; } se = s.top(); s.pop(); t = se.p; if(se.flag==Left){ se.flag = Right; s.push(se); t = t->rchild; } else{ visit(*t); t = NULL; } } }
以下是递归实现部分,递归实现,则是以二叉树边界为递归边界,前面已经说过了,其余逻辑与非递归一致,因为递归的过程,可以看作是一个入栈和弹栈的过程,即,在未到达边界时,通过递归,来访问下一个结点,例如左结点,当触及边界,则访问该结点,由于每次递归状态都被计算机保存,因此,在访问一个结点以后,返回上一个结点的状态,会依次访问上去。
递归前序遍历:
1 template<typename T> 2 void BSTree<T>::PreTraverse(BSNode<T> *t, void(*visit)(BSNode<T>&))const{ 3 if(t==NULL){ 4 return; 5 } 6 else{ 7 visit(*t); 8 PreTraverse(t->lchild, visit); 9 PreTraverse(t->rchild, visit); 10 } 11 }
递归中序遍历:
1 template<typename T> 2 void BSTree<T>::InTraverse(BSNode<T> *t, void(*visit)(BSNode<T>&))const{ 3 if(t==NULL){ 4 return; 5 } 6 else{ 7 InTraverse(t->lchild, visit); 8 visit(*t); 9 InTraverse(t->rchild, visit); 10 } 11 }
递归后序遍历:
1 template<typename T> 2 void BSTree<T>::PostTraverse(BSNode<T> *t, void(*visit)(BSNode<T>&))const{ 3 if(t!=NULL){ 4 PostTraverse(t->lchild, visit); 5 PostTraverse(t->rchild, visit); 6 visit(*t); 7 } 8 }
平衡二叉树(AVL树)
平衡二叉树是由前苏联的两位数学家G.M.Adelse-Velskil和E.M.Landis提出,因此一般也称作AVL树,AVL树本质还是一棵二叉查找树,只是在其基础上增加了“平衡”的要求。所谓平衡是指,对AVL树的任意结点来说,其左子树与右子树的高度之差的绝对值不超过1,其中左子树与右子树的高度因子之差称为平衡因子。
如下所示,就是一棵由{1,2,3,4,5,7,8}构建的AVL树:
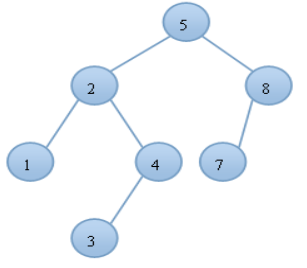
只要能随时保证每个结点平衡因子的绝对值不超过1,AVL的高度就始终能保持O(logn)级别,由于需要对每个结点都得到平衡因子,因此需要在树的结构中加入一个变量height来记录以当前结点为根结点的子树的高度。
AVL树的创建
AVL树的创建是基于二叉查找树的插入代码的基础上,增加平衡操作的。需要从插入的结点开始从下往上判断结点是否失衡,因此,需要在调用insert函数以后,更新当前子树的高度,并在这之后根据树型来进行相应的平衡操作。那么,怎么进行平衡操作呢?AVL树的插入是需要采取左旋或者右旋操作的,即,插入后,由于插入操作,导致某棵子树的高度超过了另一棵子树高度的2个结点高度,这样就破坏了树的平衡性,需要做出调整。
右旋操作
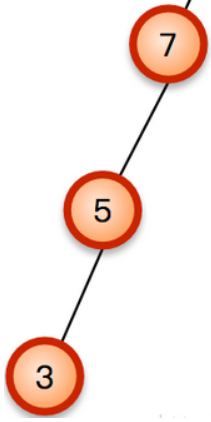
如下所示一棵简单的AVL树,对其进行插入操作以后:
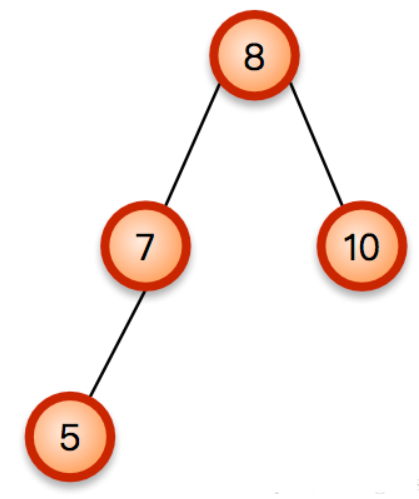
一棵简单的AVL树
变成了下图这样的AVL树:
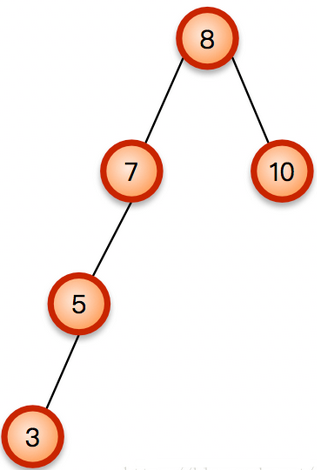
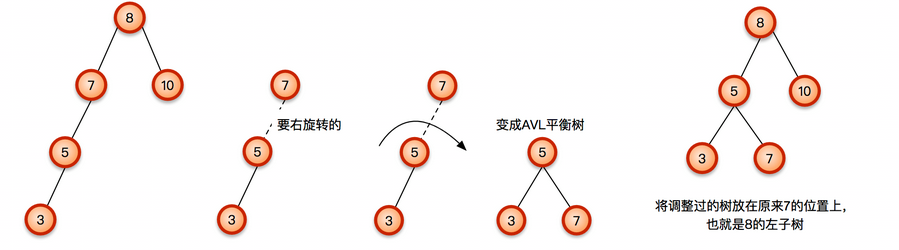
这样子就失衡了,所谓右旋操作,就是将这棵AVL树,从最靠近插入结点的失衡结点处,通过往右子树调整,使整棵树的每个结点的平衡因子变为正常,不如上图的树,离插入节点3最近的失衡结点是7,
则可以通过下图所示的操作,来平衡二叉树,即调整整棵树平衡因子:
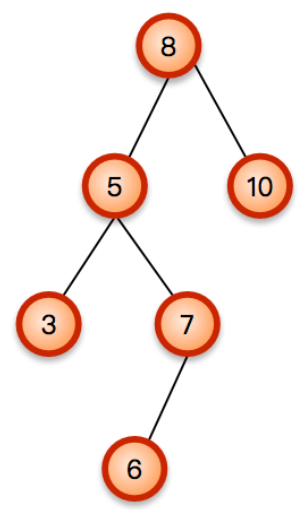
同样,左旋也与此类似。但是,如果5结点本身就有右结点,即如下所示:
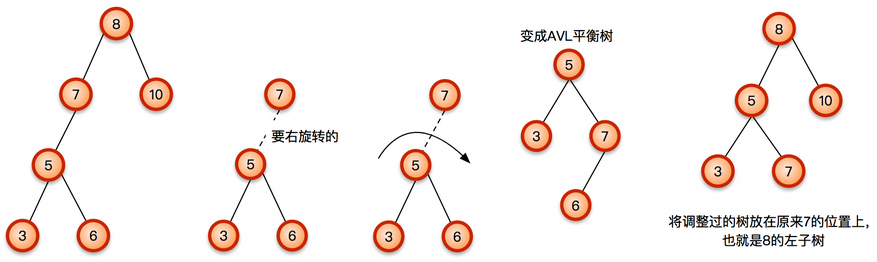
这样,在经过右旋操作以后,这棵树还是不平衡的,旋转后这棵树如下所示:
因此,还需要进行一次旋转,显然,继续右旋已经无法满足我们的需求,那么要如何进行操作,才能使这棵树回复平衡呢?(在后续中,会进行讲解)
左旋操作
左旋操作与右旋操作是类似的,都属于对子树的单旋转。
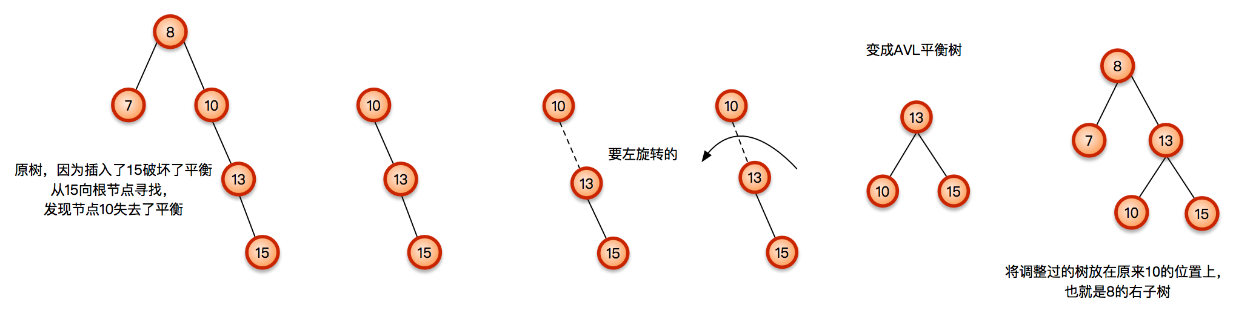
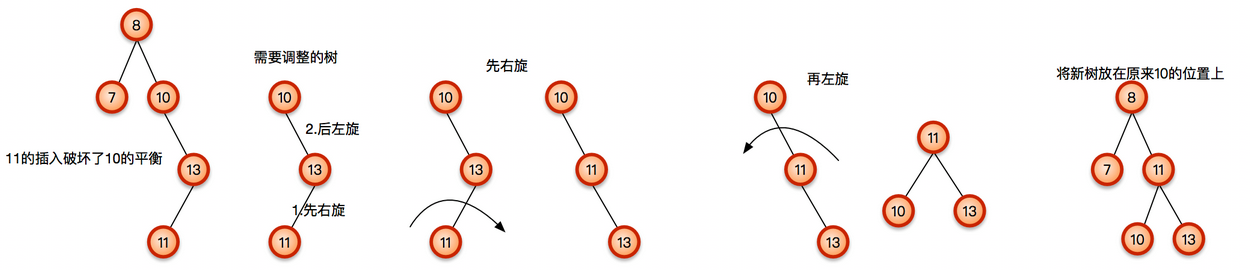
左旋与右旋一样,同样也存在这样的问题,如果该树的右子树的左结点存在,则单一通过左旋是做不到的,那么应该如何处理呢?
其实,以L和R来表示,插入结点的位置,有以下四种情况:

从上表可以看出,左旋和右旋两种情况中,左右结点若存在的话,就是上表中的RL和LR情况。则,只需要对两种情况分别按照上表采取相应的操作就可以解决,如下图所示:
LR型

RL型
由此,就能实现AVL树的平衡,下面给出代码:
AVLTree.h
1 #ifndef _AVLTREE_H_ 2 #define _AVLTREE_H_ 3 #include "C.h" 4 #include "AVLNode.h" 5 #include "Function.h" 6 7 typedef int T; 8 9 using namespace std; 10 11 template<typename T> 12 class AVLTree{ 13 private: 14 AVLNode<T> *root; 15 Destroy(AVLNode<T> *t){ 16 if(t!=NULL){ 17 Destroy(t->lchild); 18 Destroy(t->rchild); 19 delete t; 20 t = NULL; 21 } 22 return 0; 23 } 24 public: 25 AVLTree(){ 26 root = NULL; 27 } 28 ~AVLTree(){ 29 Destroy(root); 30 } 31 32 AVLNode<T>* newAVLNode(T x); //创建新结点 33 void Insert(AVLNode<T>* &t, T x); 34 void createAVLTreeFromFile(ifstream &f); 35 AVLNode<T>* Root()const; 36 int AVLTreeDepth(AVLNode<T> *t)const; 37 int getAVLTreeHeight(AVLNode<T>* t)const; //获取当前结点的高度 38 int getBalanceFactor(AVLNode<T>* t)const; //计算当前结点的高度 39 void updateAVLNodeHeight(AVLNode<T>* &t); 40 T getElem(AVLNode<T>* t)const; 41 bool getElemExist(AVLNode<T>* &t)const; 42 void LeftRotation(AVLNode<T>* &t); 43 void RightRotation(AVLNode<T>* &t); 44 void PreOrderTraverse(AVLNode<T>* t, void(*visit)(AVLNode<T>&))const; 45 void PostOrderTraverse(AVLNode<T>* t, void(*visit)(AVLNode<T>&))const; 46 }; 47 48 template<typename T> 49 AVLNode<T>* AVLTree<T>::newAVLNode(T x){ 50 AVLNode<T>* avlnode = new AVLNode<T>; 51 avlnode->data = x; 52 avlnode->height = 1; 53 avlnode->lchild = avlnode->rchild = NULL; 54 return avlnode; 55 } 56 57 template<typename T> 58 void AVLTree<T>::Insert(AVLNode<T>* &t, T x){ 59 if(t==NULL){ 60 t = newAVLNode(x); 61 return; 62 } 63 if(x==t->data){//结点已经存在,直接返回 64 return; 65 } 66 if(x < t->data){ 67 Insert(t->lchild, x); 68 updateAVLNodeHeight(t); 69 if(getBalanceFactor(t)==2){ 70 if(getBalanceFactor(t->lchild)==1){ 71 RightRotation(t); 72 } 73 else if(getBalanceFactor(t->lchild)==-1){ 74 LeftRotation(t->lchild); 75 RightRotation(t); 76 } 77 } 78 } 79 else{ 80 Insert(t->rchild, x); //值比当前结点大,往右子树插入 81 updateAVLNodeHeight(t); //更新树高 82 if(getBalanceFactor(t)==-2){ 83 if(getBalanceFactor(t->rchild)==-1){ //RR型 84 LeftRotation(t); 85 } 86 else if(getBalanceFactor(t->rchild)==1){ 87 RightRotation(t->rchild); 88 LeftRotation(t); 89 } 90 } 91 } 92 } 93 94 template<typename T> 95 void AVLTree<T>::createAVLTreeFromFile(ifstream &f){ 96 T e; 97 while(!f.eof()){ 98 InputFromFile(f, e); 99 Insert(root, e); 100 } 101 } 102 103 template<typename T> 104 AVLNode<T>* AVLTree<T>::Root()const{ 105 return root; 106 } 107 108 template<typename T> 109 int AVLTree<T>::AVLTreeDepth(AVLNode<T> *t)const{ 110 int i,j; 111 if(t==NULL){ 112 return 0; 113 } 114 else{ 115 i = AVLTreeDepth(t->lchild); 116 j = AVLTreeDepth(t->rchild); 117 } 118 return i>j ? i+1 : j+1; 119 } 120 121 template<typename T> 122 int AVLTree<T>::getAVLTreeHeight(AVLNode<T>* t)const{ 123 if(t==NULL){ 124 return 0; 125 } 126 return t->height; 127 } 128 129 template<typename T> 130 int AVLTree<T>::getBalanceFactor(AVLNode<T>* t)const{ 131 if(t==NULL){ 132 return 0; 133 } 134 return getAVLTreeHeight(t->lchild) - getAVLTreeHeight(t->rchild); 135 } 136 137 template<typename T> 138 void AVLTree<T>::updateAVLNodeHeight(AVLNode<T>* &t){ 139 t->height = max(getAVLTreeHeight(t->lchild), getAVLTreeHeight(t->rchild)) + 1; 140 } 141 142 template<typename T> 143 T AVLTree<T>::getElem(AVLNode<T>* t)const{ 144 return t->data; 145 } 146 147 template<typename T> 148 bool AVLTree<T>::getElemExist(AVLNode<T>* &t)const{//判断当前结点是否为空 149 if(t!=NULL){ 150 return true; 151 } 152 return false; 153 } 154 155 template<typename T> 156 void AVLTree<T>::LeftRotation(AVLNode<T>* &t){ 157 AVLNode<T> *temp = t->rchild; 158 t->rchild = temp->lchild; 159 temp->lchild = t; 160 updateAVLNodeHeight(t); 161 updateAVLNodeHeight(temp); 162 t = temp; 163 } 164 165 template<typename T> 166 void AVLTree<T>::RightRotation(AVLNode<T>* &t){ 167 AVLNode<T> *temp = t->lchild; 168 t->lchild = temp->rchild; 169 temp->rchild = t; 170 updateAVLNodeHeight(t); 171 updateAVLNodeHeight(temp); 172 t = temp; 173 } 174 175 template<typename T> 176 void AVLTree<T>::PreOrderTraverse(AVLNode<T>* t, void(*visit)(AVLNode<T>&))const{ 177 if(t!=NULL){ 178 visit(*t); 179 PreOrderTraverse(t->lchild, visit); 180 PreOrderTraverse(t->rchild, visit); 181 } 182 } 183 184 template<typename T> 185 void AVLTree<T>::PostOrderTraverse(AVLNode<T>* t, void(*visit)(AVLNode<T>&))const{ 186 if(t!=NULL){ 187 PostOrderTraverse(t->lchild, visit); 188 PostOrderTraverse(t->rchild, visit); 189 visit(*t); 190 } 191 } 192 #endif // _AVLTREE_H_
Function.h
1 #ifndef _FUNCTION_H_ 2 #define _FUNCTION_H_ 3 #include "C.h" 4 #include "AVLNode.h" 5 #include "AVLTree.h" 6 7 typedef int T; 8 9 using namespace std; 10 11 bool InputFromFile(ifstream &f, T &e){ 12 f>>e; 13 return f.good(); 14 } 15 16 void visit(AVLNode<T> &t){ 17 cout<<t.data<<" "; 18 } 19 20 #endif // _FUNCTION_H_
C.h
1 #ifndef _C_H_ 2 #define _C_H_ 3 #include<iostream> 4 #include<string> 5 #include<stdio.h> 6 #include<algorithm> 7 #include<map> 8 #include<math.h> 9 #include<queue> 10 #include<stack> 11 #include<vector> 12 #include<fstream> 13 #include<assert.h> 14 #endif // _C_H_
AVLNode.h
1 #ifndef _AVLNODE_H_ 2 #define _AVLNODE_H_ 3 4 typedef int T; 5 6 template<typename T> 7 struct AVLNode{ 8 int height; //平衡因子 9 T data; //数据域 10 AVLNode<T> *lchild, *rchild; //指针域 11 }; 12 #endif // _AVLNODE_H_

 浙公网安备 33010602011771号
浙公网安备 33010602011771号