
【凸优化】3 多面体,单纯形,半正定锥
1 多面体 Polyhedra
定义:多面体为一系列的(有限个)线性等式和不等式的解集:
根据上式可看出,多面体是\(m\)个半空间和\(p\)个超平面的交集,其中\(m,n\)为非无穷的正数。
仿射集(直线、子空间、超平面)、射线、线段、半空间都是多面体,多面体是凸集。
多面体的另一种表示:
其中
其中符号\(\preceq\)表示\(\mathbb{R}^m\)空间内的向量号不等或分量不等号,例如\(u\preceq v\)表示\(u_i \leq v_i\),\(i = 1,...,m\)。
2 单纯形 Simplexes
1)定义
定义:在\(\mathbb{R}^n\)空间中选取\(k+1\)个仿射独立(affinely independent)的点,即\(v_1 - v_0,...,v_k-v_0\)是线性无关的,则与上述点相关的单纯形为:
其中\({\rm conv}\)表示凸包,\(\mathbf{1}\)表示所有元素均为\(1\)的向量。该单纯形的仿射维数为\(k\),称为\(k\)维单纯形。
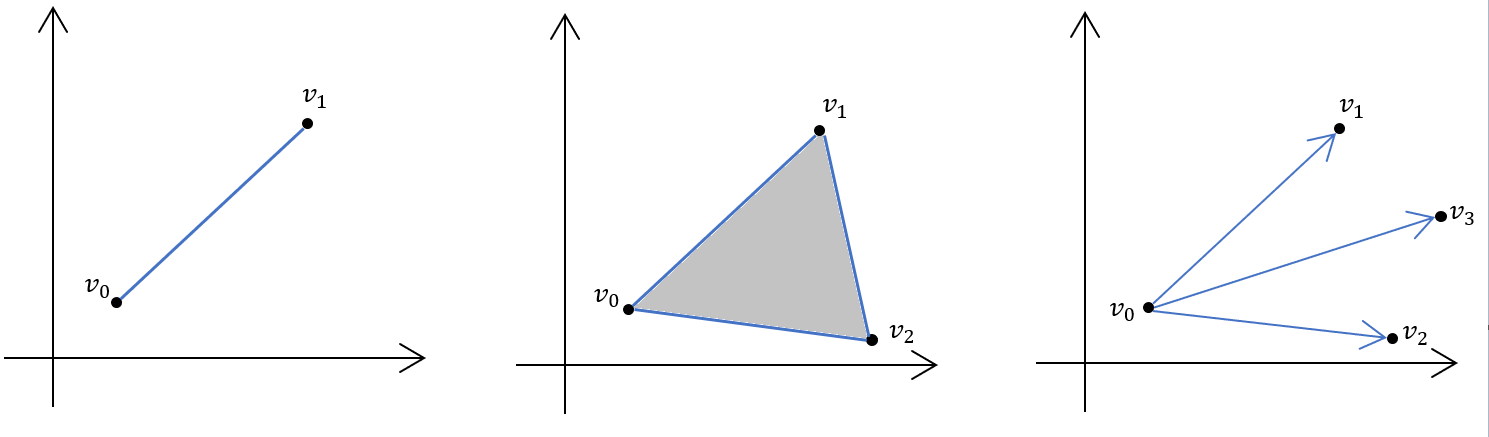
图1. \(\mathbb{R}^2\)空间中,左:\(k=1\),选取两个点得到的单纯形为一个线段;中:\(k=2\),选三个点,相关的单纯形为一个三角形(包括边和阴影部分);右:\(k=3\),选取四个点,但是在二维空间中无法找到三个线性无关的向量(图中的任一向量可由另两个向量的线性组合得到),故在二维空间中,无法找到四个或以上的点来构成一个单纯形。
如图1,同样的可以得出:一维空间中的单纯形是线段;二维空间中的单纯形是三角形;三维空间中的单纯形为四面体。
2)证明:单纯形是多面体的一种
\(C\in\mathbb{R}^n\)为单纯形,则根据单纯形的定义可得:
为方便表示,我们定义\(y\) 和 \(B\):
则公式(1)可以表示为:
\(v_0, ..., v_k\)为仿射独立的,即\(v_1-v_0,...,v_k-v_0\)为线性无关的,可得\({\rm rank}(B)=k\),\((k\leq n)\),因此存在一个非奇异矩阵\(A=\begin{bmatrix}A_1 \\A_2\end{bmatrix}\in\mathbb{R}^{n\times n}\)使得
对公式(2)左乘一个矩阵\(A\):
即
因此\(x\in C\) 当且仅当 \(A_2 x= A_2 v_0\)且向量\(y=A_1x - A_1 v_0\)满足\(y\succeq 0, \; \mathbf{1}^T y \leq 1\)。换句话说,\(x\in C\) 当且仅当:
即单纯形为两个不等式和一个等式描述的集合,这也就是多面体的定义。
3 半正定锥 The Positive Semidefinite Cone
1)定义
对称矩阵的集合 \(\textbf{S}^n\):
这是一个维度为 \(n(n + 1)/2\) 的向量空间。
是凸锥,所以也是凸集。
对称半正定矩阵的集合 \(\textbf{S}^n_+\):
这里的符号\(\succeq\)是针对矩阵的,表示\(X\)的奇异值大于等于0。
是凸锥,所以也是凸集。
对称正定矩阵的集合 \(\textbf{S}^n_{++}\):
是凸集,不是凸锥。
2)证明:\(\textbf{S}^n_+\)是凸锥
即(根据凸锥的定义)任取\(\theta_1, \theta_2 \geq 0\),\(A, B \in \textbf{S}^n_+\),证明\(\theta_1 A+\theta_2 B\in \textbf{S}^n_+\)。
根据半正定矩阵的性质有:
因此:
即\(\theta_1 A+\theta_2 B\in \textbf{S}^n_+\),证明完毕。
3)不同空间中的特征
n=1:即一维空间中,\(\textbf{S}^1 = \textbf{R}\)(实数集);\(\textbf{S}^1_+ = \textbf{R}_+\)(非负实数集);\(\textbf{S}^1_{++} = \textbf{R}_{++}\)(正实数集)。
n=2:即二维空间中,如图2,我们有:
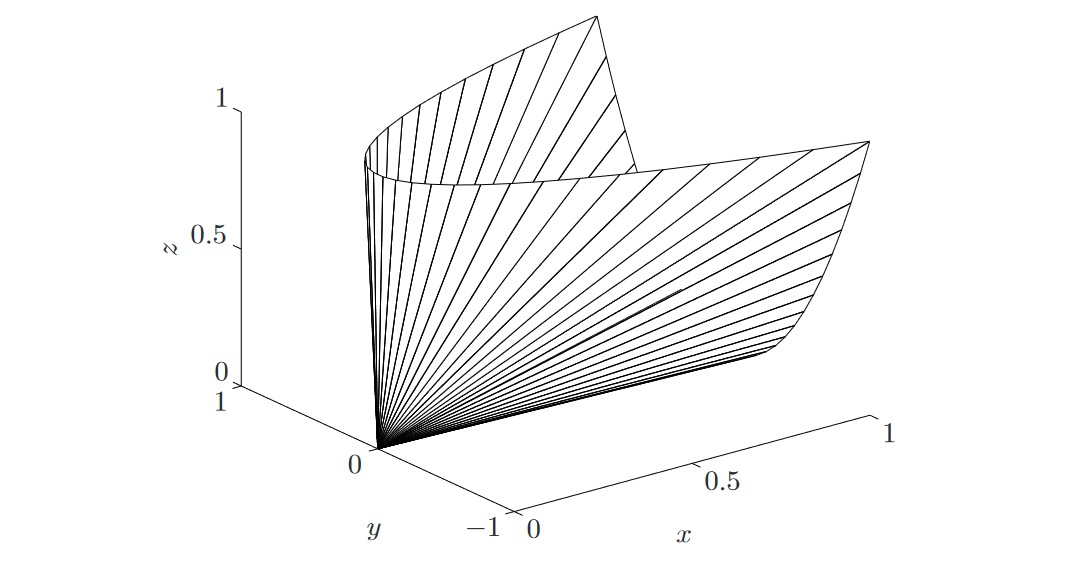
图2. 二维空间中半正定锥的边界,在\(\mathbb{R}^3\)中绘制为 \((x, y, z)\)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号