
相机外参和内参矩阵
相机与变换
一、内参与外参概念
在计算机视觉中,特别是在相机标定和立体视觉领域,内参(Intrinsic Parameters)和外参(Extrinsic Parameters)是非常重要的概念。它们与相机的几何属性和姿态有关。
- 内参(Intrinsic Parameters): 内参是描述相机内部属性的参数,包括焦距、主点(光学中心)坐标、畸变系数等。内参通常在相机标定时确定,因为它们通常对于特定相机型号是固定的,不随时间变化。一旦相机内参被确定,它们在相机的使用过程中通常是保持不变的。
- 外参(Extrinsic Parameters): 外参是描述相机在世界坐标系中的位置和姿态的参数,通常包括旋转矩阵和平移向量。外参在不同的相机位置或拍摄时刻可能会发生变化。例如,在立体视觉中,如果有两个相机,那么它们的相对位置和方向会在每次移动相机时发生变化,从而导致外参的变化。如果相机不发生位置和方向的变化,比如相机固定在一个固定位置,那么外参在很长一段时间内可能保持不变。然而,如果相机的位置或方向发生变化,例如移动相机或更改拍摄角度,外参会随之变化。
二、四个坐标系
四个坐标系的意义,世界坐标系(参考坐标系)、摄像机坐标系 、图像物理坐标系和像素坐标系。
- 世界坐标系就是物体在真实世界中的坐标,比如黑白棋盘格的世界坐标系原点定在第一个棋盘格的顶点,
- 相机坐标系以光心为原点,以平行于图像的
- 图像物理坐标系以主光轴和图像平面交点为坐标原点(一般为图像中心),
- 图像像素坐标系以图像的左上顶点为坐标原点,
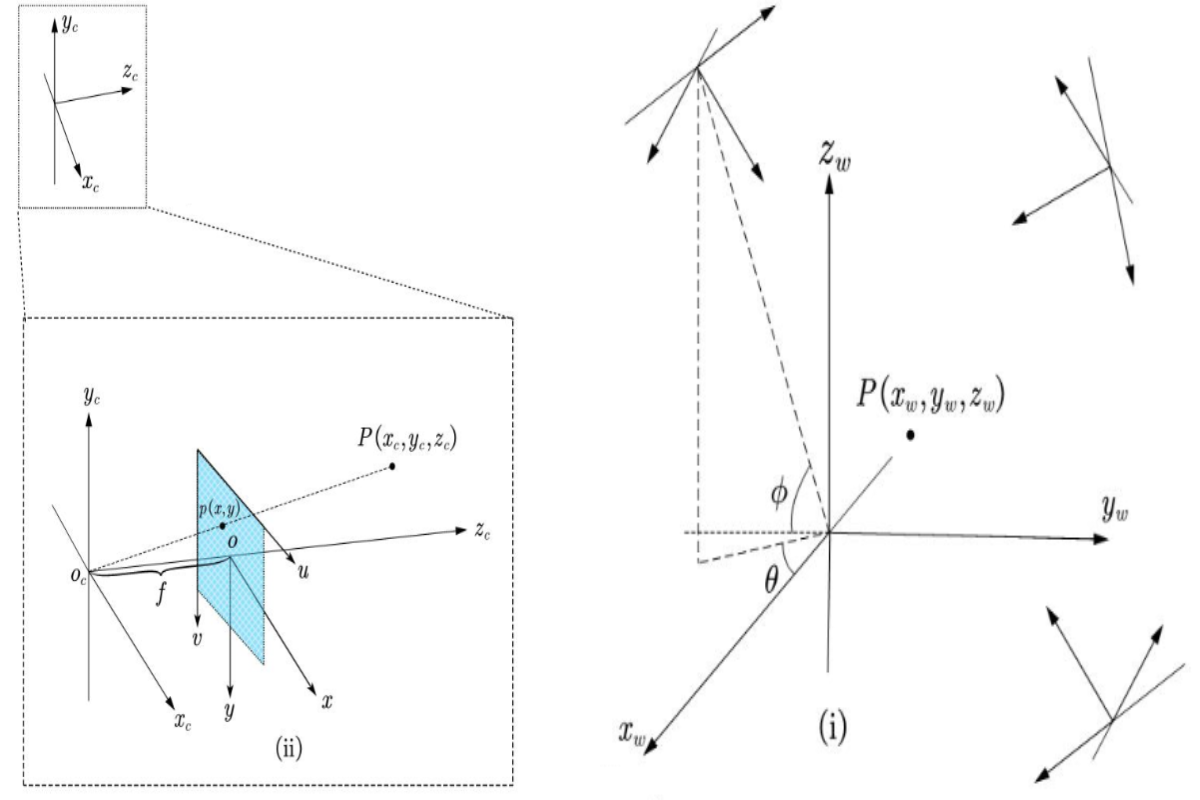
相机成像过程一般涉及到四个坐标系的变换,变换关系为:
我们考虑最简单的小孔成像模型:
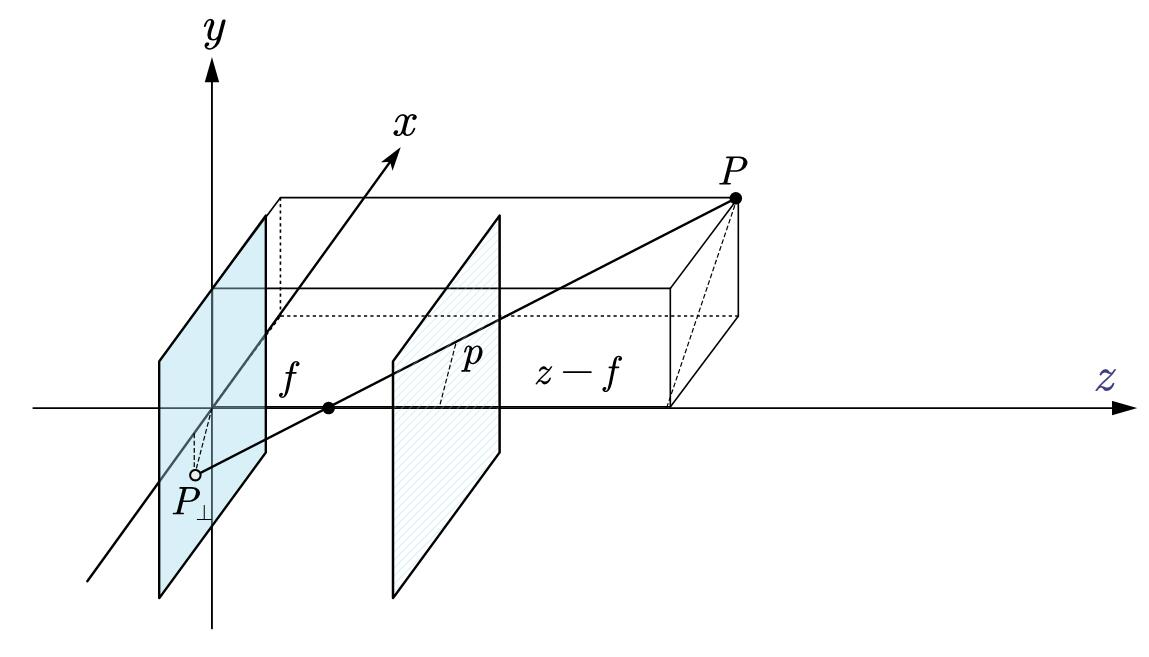
为了分析的方便,经常将成像平面沿小孔(光心)对称处理,使图像不再倒立,如图中蓝色实线所指平面。
三、相机外参
首先,处于真实世界中的物体都有一个默认坐标系,称为世界坐标系
同时,平移向量可以表示为
矩阵
四、相机内参
接着考虑上图ii的下面部分,假设相机坐标下的点
写成矩阵形式为:
最后得到了投影平面上图像的坐标,但要注意,我们此时仍然在物理坐标系下。即如果现在这些字母都有个单位的话,那么它们应该是米或毫米。距离我们熟悉的图片还有一步:从图像坐标系变换至像素坐标系。为了实现这一点,我们进行了水平和竖直方向的伸缩变换以及平移变换,将坐标系的原点从光心转移到(通常时候)图像的左上角:
假设在物理成像表面固定着像素平面
带入
其中,我们用
用齐次坐标,写为矩阵形式:
这里
其中,
本文来自博客园,作者:Serfeliz,转载请注明原文链接:https://www.cnblogs.com/serfeliz/p/18244362


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步