

摘要: 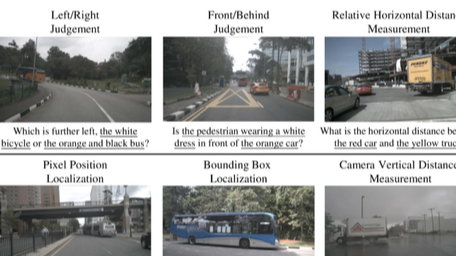 2024-11-20, 由武汉大学、中国科学院自动化研究所、悉尼科技大学、牛津大学等合创建了DriveMLLM数据集,该数据集是自动驾驶领域首个专为评估多模态大型语言模型(MLLMs)空间理解能力而设计的基准,对于推动自动驾驶技术的发展具有重要意义。 阅读全文
2024-11-20, 由武汉大学、中国科学院自动化研究所、悉尼科技大学、牛津大学等合创建了DriveMLLM数据集,该数据集是自动驾驶领域首个专为评估多模态大型语言模型(MLLMs)空间理解能力而设计的基准,对于推动自动驾驶技术的发展具有重要意义。 阅读全文
2024-11-20, 由武汉大学、中国科学院自动化研究所、悉尼科技大学、牛津大学等合创建了DriveMLLM数据集,该数据集是自动驾驶领域首个专为评估多模态大型语言模型(MLLMs)空间理解能力而设计的基准,对于推动自动驾驶技术的发展具有重要意义。 阅读全文
摘要: 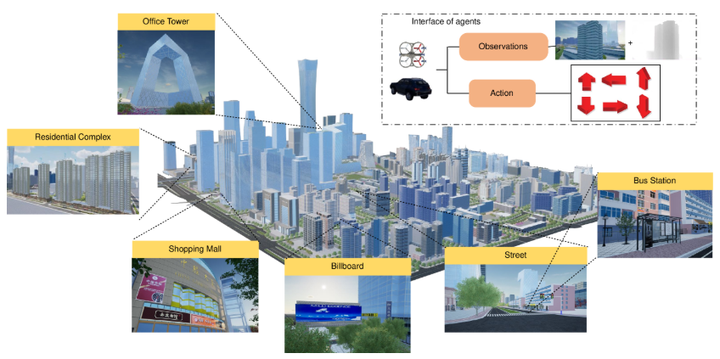 2024-10-13,由清华大学创建的EmbodiedCity数据集,标志着Embodied AI研究从室内走向户外,为人工智能提供了一个更接近现实世界的测试环境。 阅读全文
2024-10-13,由清华大学创建的EmbodiedCity数据集,标志着Embodied AI研究从室内走向户外,为人工智能提供了一个更接近现实世界的测试环境。 阅读全文
2024-10-13,由清华大学创建的EmbodiedCity数据集,标志着Embodied AI研究从室内走向户外,为人工智能提供了一个更接近现实世界的测试环境。 阅读全文
摘要:  2024-11-28,由NVIDIA、上海大学和新加坡科技学院联合创建的AdaR2R数据集,旨在通过在连续室内环境中引入移动的人类障碍物,提升机器人导航任务的复杂性和现实世界适应性。 阅读全文
2024-11-28,由NVIDIA、上海大学和新加坡科技学院联合创建的AdaR2R数据集,旨在通过在连续室内环境中引入移动的人类障碍物,提升机器人导航任务的复杂性和现实世界适应性。 阅读全文
2024-11-28,由NVIDIA、上海大学和新加坡科技学院联合创建的AdaR2R数据集,旨在通过在连续室内环境中引入移动的人类障碍物,提升机器人导航任务的复杂性和现实世界适应性。 阅读全文
摘要: 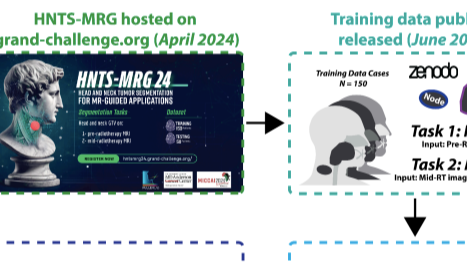 2024-11-28,由德克萨斯大学MD安德森癌症中心创建HNTS-MRG 2024 Challenge数据集,目的通过公开数据集推动自动分割算法的发展,这对于提高放射治疗的精确性和效率具有重要意义。 阅读全文
2024-11-28,由德克萨斯大学MD安德森癌症中心创建HNTS-MRG 2024 Challenge数据集,目的通过公开数据集推动自动分割算法的发展,这对于提高放射治疗的精确性和效率具有重要意义。 阅读全文
2024-11-28,由德克萨斯大学MD安德森癌症中心创建HNTS-MRG 2024 Challenge数据集,目的通过公开数据集推动自动分割算法的发展,这对于提高放射治疗的精确性和效率具有重要意义。 阅读全文