autoware杂记
查看版本
https://answers.ros.org/question/330033/is-there-a-way-to-know-which-version-of-autoware-is-running/
cd autoware_dir/src/autoware/common
git describe --tags
pcl库安装
sudo apt-get install ros-kinetic-pcl-ros
[lidar_point_pillars.launch] is neither a launch file in package

编译问题,需要cuda=9.0 cudnn=7.3.1 tensorrt=5.0.2
在安装tensorrt时会出现

解决方法:
sudo apt-get install -y --no-install-recommends libnvinfer5=5.0.2-1+cuda9.0
sudo apt-get install -y --no-install-recommends libnvinfer-dev=5.0.2-1+cuda9.0
sudo apt-get install -y --no-install-recommends libnvinfer-samples=5.0.2-1+cuda9.0
单独编一个包
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release -packages-select lidar_point_pillars
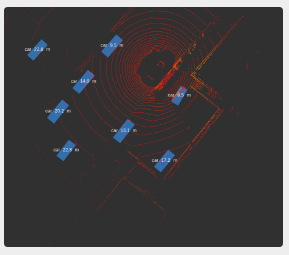
roslaunch lidar_point_pillars lidar_point_pillars.launch pfe_onnx_file:=/home/autoware/sc_sync/pfe.onnx rpn_onnx_file:=/home/autoware/sc_sync/rpn.onnx input_topic:=/points_raw
docker内的cuda版本与主机的cuda版本也必须保持一致!
colocn
打开详细编译
colcon build --cmake-args -DCMAKE_VERBOSE_MAKEFILE:BOOL=ON --packages-select autoware_health_checker
作者:sdu20112013
如果您觉得阅读本文对您有帮助,请点一下“推荐”按钮,您的“推荐”将是我最大的写作动力!欢迎转载,转载请注明出处.

