ssd原理及代码实现详解
通过https://github.com/amdegroot/ssd.pytorch,结合论文https://arxiv.org/abs/1512.02325来理解ssd.
ssd由三部分组成:
- base
- extra
- predict
base原论文里用的是vgg16去掉全连接层.
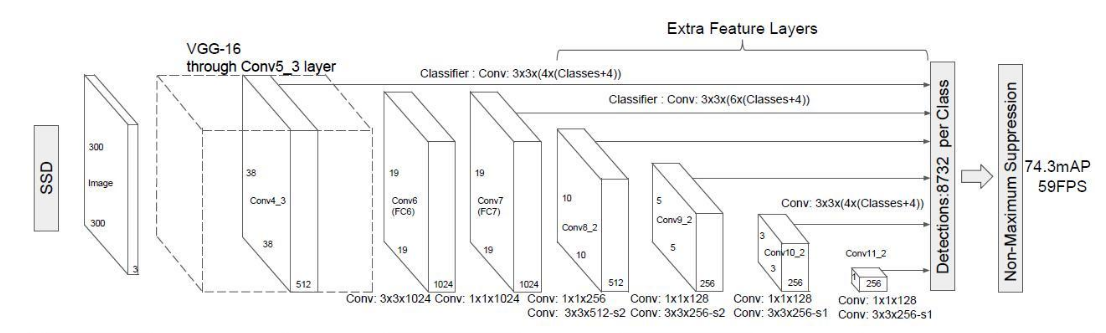
base + extra完成特征提取的功能.得到不同size的feature map,基于这些feature maps,我们再用不同的卷积核去卷积,分别完成类别预测和坐标预测.
基础特征提取网络
特征提取网络由两部分组成
- vgg16
- extra layer
vgg16变种
vgg16结构:
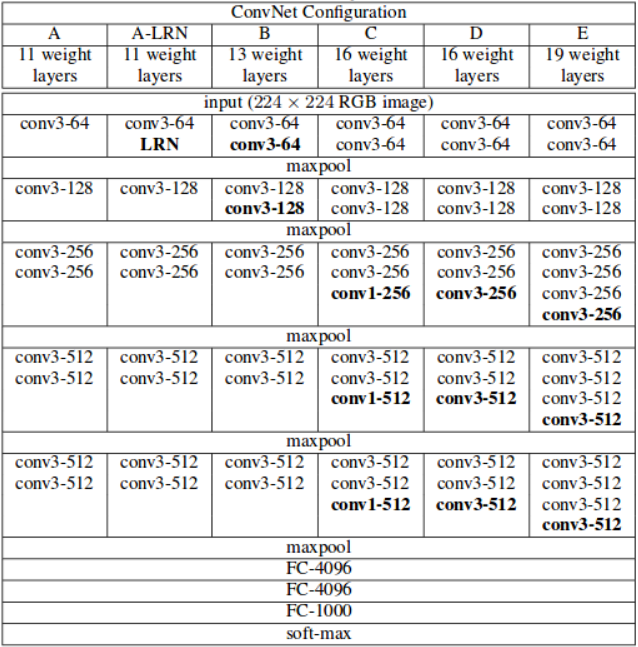
将vgg16的全连接层用卷积层换掉.
代码实现
ssd.py中
base = {
'300': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'C', 512, 512, 512, 'M',
512, 512, 512],
'512': [],
}
extras = {
'300': [256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256],
'512': [],
}
}
定义了每一层的卷积核的数量.其中'M','C'均代表maxpool池化层.只是'C'会使用 ceil instead of floor to compute the output shape.
参见https://pytorch.org/docs/stable/nn.html#maxpool2d
def vgg(cfg, i, batch_norm=False):
layers = []
in_channels = i
for v in cfg:
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
elif v == 'C':
layers += [nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm:
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else:
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v
pool5 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
conv6 = nn.Conv2d(512, 1024, kernel_size=3, padding=6, dilation=6)
conv7 = nn.Conv2d(1024, 1024, kernel_size=1)
layers += [pool5, conv6,
nn.ReLU(inplace=True), conv7, nn.ReLU(inplace=True)]
return layers
这样就形成了一个基础的特征提取网络.前面的部分和vgg16一样的,全连接层换成了conv6+relu+conv7+relu.
extra layer
在前面得到的输出的基础上,继续做卷积,以得到更多不同尺寸的feature map.
代码实现
extras = {
'300': [256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256],
'512': [],
}
def add_extras(cfg, i, batch_norm=False):
# Extra layers added to VGG for feature scaling
layers = []
in_channels = i
flag = False
for k, v in enumerate(cfg):
if in_channels != 'S':
if v == 'S':
layers += [nn.Conv2d(in_channels, cfg[k + 1],
kernel_size=(1, 3)[flag], stride=2, padding=1)]
else:
layers += [nn.Conv2d(in_channels, v, kernel_size=(1, 3)[flag])]
flag = not flag
in_channels = v
return layers
add_extras(extras[str(size)], 1024)
[256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256]用以创建layer.
如果是'S'的话,代表用的卷积核为3 x 3,否则为1 x 1,卷积核的数量为'S'下一个的数字.
这样的话,我们就构建出了extra layers.
多尺度检测multibox
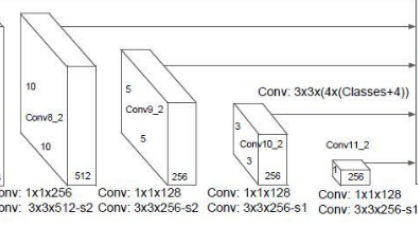
我们已经得到了很多layer的输出(称其为feature map).size有大有小. 那么现在我们就对某些层(conv4_3,conv7,conv8_2,conv9_2,conv10_2,conv11_2)的feature map再做卷积,得到类别和位置信息.
分别用2组3 x 3的卷积核去做卷积,一个负责预测类别,一个负责预测位置.卷积核的个数分别为boxnum x clasess_num,boxnum x 4(坐标由4个参数,中心坐标,box宽高即可确定).
即在m x m的feature map上做卷积我们会得到一个m x m x (boxnum x clasess_num) 和一个m x m x (boxnum x 4)的tensor.分别用以计算概率和框的位置.
代码实现
def multibox(vgg, extra_layers, cfg, num_classes):
loc_layers = []
conf_layers = []
vgg_source = [21, -2]
for k, v in enumerate(vgg_source):
loc_layers += [nn.Conv2d(vgg[v].out_channels,
cfg[k] * 4, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(vgg[v].out_channels,
cfg[k] * num_classes, kernel_size=3, padding=1)]
for k, v in enumerate(extra_layers[1::2], 2):
loc_layers += [nn.Conv2d(v.out_channels, cfg[k]
* 4, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(v.out_channels, cfg[k]
* num_classes, kernel_size=3, padding=1)]
return vgg, extra_layers, (loc_layers, conf_layers)
其中每一个feature map预测几个box由下面变量给出.
mbox = {
'300': [4, 6, 6, 6, 4, 4], # number of boxes per feature map location
'512': [],
}
在哪些layer的feature map上做预测,根据论文里是固定的,参见开头的ssd结构图.反映到代码里则为
vgg_source = [21, -2]
extra_layers[1::2]
即
中的conv4_3,conv7,conv8_2,conv9_2,conv10_2,conv11_2这六个layer的feature map.
先验框生成
你可以称之为priorbox/default box/anchor box都是一个意思.
我们先来讲先验框的原理.这个其实类似yolov3中的anchor box,我们基于这些shape的box去做预测.
priorbox和不同的feature map上做预测都是为了解决对不同尺寸的物体的检测问题.不同的feature map负责不同尺寸的目标.同时每一个feature map cell又负责该尺寸的不同宽高比的目标.

首先,不同的feature_map负责不同的尺寸.
对smin=0.2,smax=0.9.m=6(我们在6个layer的feature map上做检测), 因此就有 s={0.2,0.34,0.48,0.62,0.76,0.9}.
假设宽高比分别为,则对第二个feature map(19 x 19的这个,conv7),那么,我们计算宽高比为1的box,则得到的box为(0.2,0.2).模型的输入图像尺寸是(300,300),那么相应的box为(60,60).依次类推,可以得到其余的deafult box的shape共6个.(对宽高比为1的box,额外多计算一个的box出来). 从而我们得到了这一个feature map负责预测的不同形状的box
如图:
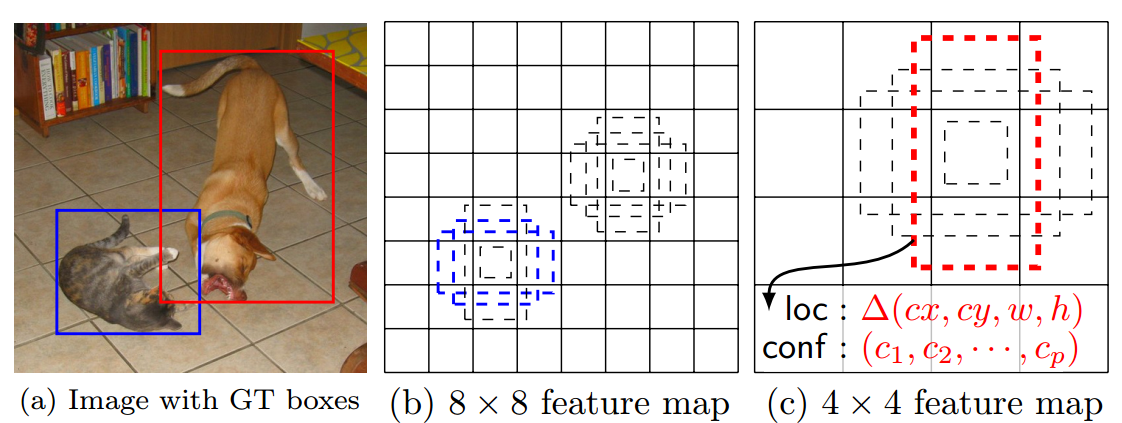
那么对于conv4_3这个layer而言的话,我们设定的deafault box数量是4,于是我们最终就有38 x 38 x 4个box.我们在这些box的基础上去预测我们的box.
我们对不同层的default box的数量设定是(4, 6, 6, 6, 4, 4),所以我们最终总共预测出个box.
那实际调参的重点也就是这些default box的调整,要尽量使其贴合你自己要检测的目标.,类似于yolov3中调参调整anchor的大小.
代码实现
prior_box.py中定义了PriorBox类,forward函数实现default box的计算.
配置文件定义域config.py
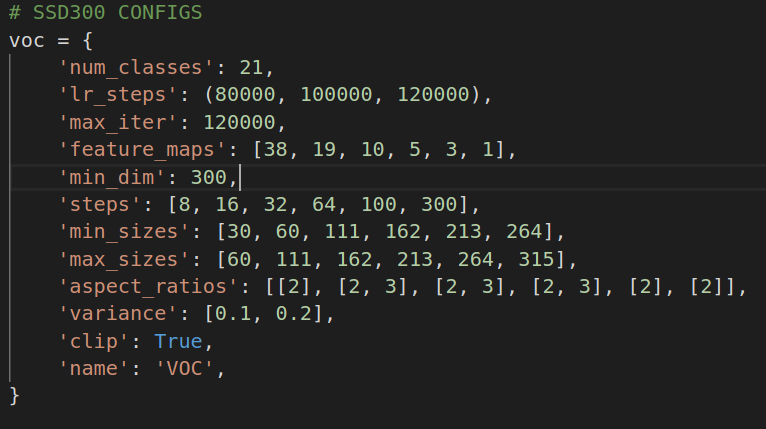
其中
'min_sizes': [30, 60, 111, 162, 213, 264],
'max_sizes': [60, 111, 162, 213, 264, 315],
'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
用以计算每一个feature map的default box. 这里配置文件的定义让人稍微有点糊涂. min_size/max_size都是用于宽高比为1的box的预测.[2]用于预测宽高比为2:1和1:2的box.
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps): #config.py中'feature_maps': [38, 19, 10, 5, 3, 1]
for i, j in product(range(f), repeat=2):
f_k = self.image_size / self.steps[k] #基本上除下来和feature_map size类似. 这里直接用f替代f_k区别不大
# unit center x,y # 每个feature_map cell的中心
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = self.min_sizes[k]/self.image_size #min_sizes预测一个宽高比为1的shape
mean += [cx, cy, s_k, s_k]
# aspect_ratio: 1
# rel size: sqrt(s_k * s_(k+1))
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size)) #max_size负责预测一个宽高比为1的shape
mean += [cx, cy, s_k_prime, s_k_prime]
# rest of aspect ratios #
for ar in self.aspect_ratios[k]: #比如对[2,3]则预测4个shape,1;2,2:1,1:3,3:1
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
比如对38 x 38这个feature map的第一个cell,共计算出4个default box.前两个参数是box中点,后面是宽,高.都是相对原图的比例.
tensor([[0.0133, 0.0133, 0.1000, 0.1000],
[0.0133, 0.0133, 0.1414, 0.1414],
[0.0133, 0.0133, 0.1414, 0.0707],
[0.0133, 0.0133, 0.0707, 0.1414]])
预测框生成
feature_map卷积后的tensor含义
每一个feature_map卷积后可得一个m x m x 4的tensor.其中4是(t_x,t_y,t_w,t_h),这时候我们需要用这些数在default box的基础上去得到我们的预测框的坐标.可以认为神经网络预测得到的是相对参考框的偏移. 这也是所谓的把坐标预测当做回归问题的含义.box=anchor_box x 形变矩阵,我们回归的就是这个形变矩阵的参数,即(t_x,t_y,t_w,t_h)
即
b_center_x = t_x *prior_variance[0]* p_width + p_center_x
b_center_y = t_y *prior_variance[1] * p_height + p_center_y
b_width = exp(prior_variance[2] * t_w) * p_width
b_height = exp(prior_variance[3] * t_h) * p_height
或者
b_center_x = t_x * p_width + p_center_x
b_center_y = t_y * p_height + p_center_y
b_width = exp(t_w) * p_width
b_height = exp(t_h) * p_height
其中p_*代表的是default box. b_*才是我们最终预测的box的坐标.
这时候我们得到了很多很多(8732)个box.我们要从这些box中筛选出我们最终给出的box.
伪代码为
for every conv box:
for every class :
if class_prob < theshold:
continue
predict_box = decode(convbox)
nms(predict_box) #去除非常接近的框
代码实现
detection.py
class Detect(Function):
def forward(self, loc_data, conf_data, prior_data):
##loc_data [batch,8732,4]
##conf_data [batch,8732,1+class]
##prior_data [8732,4]
num = loc_data.size(0) # batch size
num_priors = prior_data.size(0)
output = torch.zeros(num, self.num_classes, self.top_k, 5)
conf_preds = conf_data.view(num, num_priors,
self.num_classes).transpose(2, 1)
# Decode predictions into bboxes.
for i in range(num):
decoded_boxes = decode(loc_data[i], prior_data, self.variance)
# For each class, perform nms
conf_scores = conf_preds[i].clone()
for cl in range(1, self.num_classes):
c_mask = conf_scores[cl].gt(self.conf_thresh)
scores = conf_scores[cl][c_mask]
if scores.size(0) == 0:
continue
l_mask = c_mask.unsqueeze(1).expand_as(decoded_boxes)
boxes = decoded_boxes[l_mask].view(-1, 4)
# idx of highest scoring and non-overlapping boxes per class
ids, count = nms(boxes, scores, self.nms_thresh, self.top_k)
output[i, cl, :count] = \
torch.cat((scores[ids[:count]].unsqueeze(1),
boxes[ids[:count]]), 1)
flt = output.contiguous().view(num, -1, 5)
_, idx = flt[:, :, 0].sort(1, descending=True)
_, rank = idx.sort(1)
flt[(rank < self.top_k).unsqueeze(-1).expand_as(flt)].fill_(0)
return output
具体的核心逻辑在box_utils.py
- decode 用于根据卷积结果计算box坐标
def decode(loc, priors, variances):
boxes = torch.cat((
priors[:, :2] + loc[:, :2] * variances[0] * priors[:, 2:],
priors[:, 2:] * torch.exp(loc[:, 2:] * variances[1])), 1)
boxes[:, :2] -= boxes[:, 2:] / 2
boxes[:, 2:] += boxes[:, :2]
return boxes
这里做了一个center_x,center_y, w, h -> xmin, ymin, xmax, ymax的转换.
boxes[:, :2] -= boxes[:, 2:] / 2
boxes[:, 2:] += boxes[:, :2]
返回的已经是(xmin, ymin, xmax, ymax)的形式来表示box了.
- nms 如果两个框的overlap超过0.5,则认为框的是同一个物体,只保留概率更高的框
def nms(boxes, scores, overlap=0.5, top_k=200):
"""Apply non-maximum suppression at test time to avoid detecting too many
overlapping bounding boxes for a given object.
Args:
boxes: (tensor) The location preds for the img, Shape: [num_priors,4].
scores: (tensor) The class predscores for the img, Shape:[num_priors].
overlap: (float) The overlap thresh for suppressing unnecessary boxes.
top_k: (int) The Maximum number of box preds to consider.
Return:
The indices of the kept boxes with respect to num_priors.
"""
keep = scores.new(scores.size(0)).zero_().long()
if boxes.numel() == 0:
return keep
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
area = torch.mul(x2 - x1, y2 - y1)
v, idx = scores.sort(0) # sort in ascending order
# I = I[v >= 0.01]
idx = idx[-top_k:] # indices of the top-k largest vals
xx1 = boxes.new()
yy1 = boxes.new()
xx2 = boxes.new()
yy2 = boxes.new()
w = boxes.new()
h = boxes.new()
# keep = torch.Tensor()
count = 0
while idx.numel() > 0:
i = idx[-1] # index of current largest val
# keep.append(i)
keep[count] = i
count += 1
if idx.size(0) == 1:
break
idx = idx[:-1] # remove kept element from view
# load bboxes of next highest vals
torch.index_select(x1, 0, idx, out=xx1)
torch.index_select(y1, 0, idx, out=yy1)
torch.index_select(x2, 0, idx, out=xx2)
torch.index_select(y2, 0, idx, out=yy2)
# store element-wise max with next highest score
xx1 = torch.clamp(xx1, min=x1[i])
yy1 = torch.clamp(yy1, min=y1[i])
xx2 = torch.clamp(xx2, max=x2[i])
yy2 = torch.clamp(yy2, max=y2[i])
w.resize_as_(xx2)
h.resize_as_(yy2)
w = xx2 - xx1
h = yy2 - yy1
# check sizes of xx1 and xx2.. after each iteration
w = torch.clamp(w, min=0.0)
h = torch.clamp(h, min=0.0)
inter = w*h
# IoU = i / (area(a) + area(b) - i)
rem_areas = torch.index_select(area, 0, idx) # load remaining areas)
union = (rem_areas - inter) + area[i]
IoU = inter/union # store result in iou
# keep only elements with an IoU <= overlap
idx = idx[IoU.le(overlap)]
return keep, count
以上就是有关ssd网络结构以及每一层的输出的含义.这些已经足够我们了解推理过程了.即给定一个图,模型如何预测出box的位置.后面我们将继续关注训练的过程.
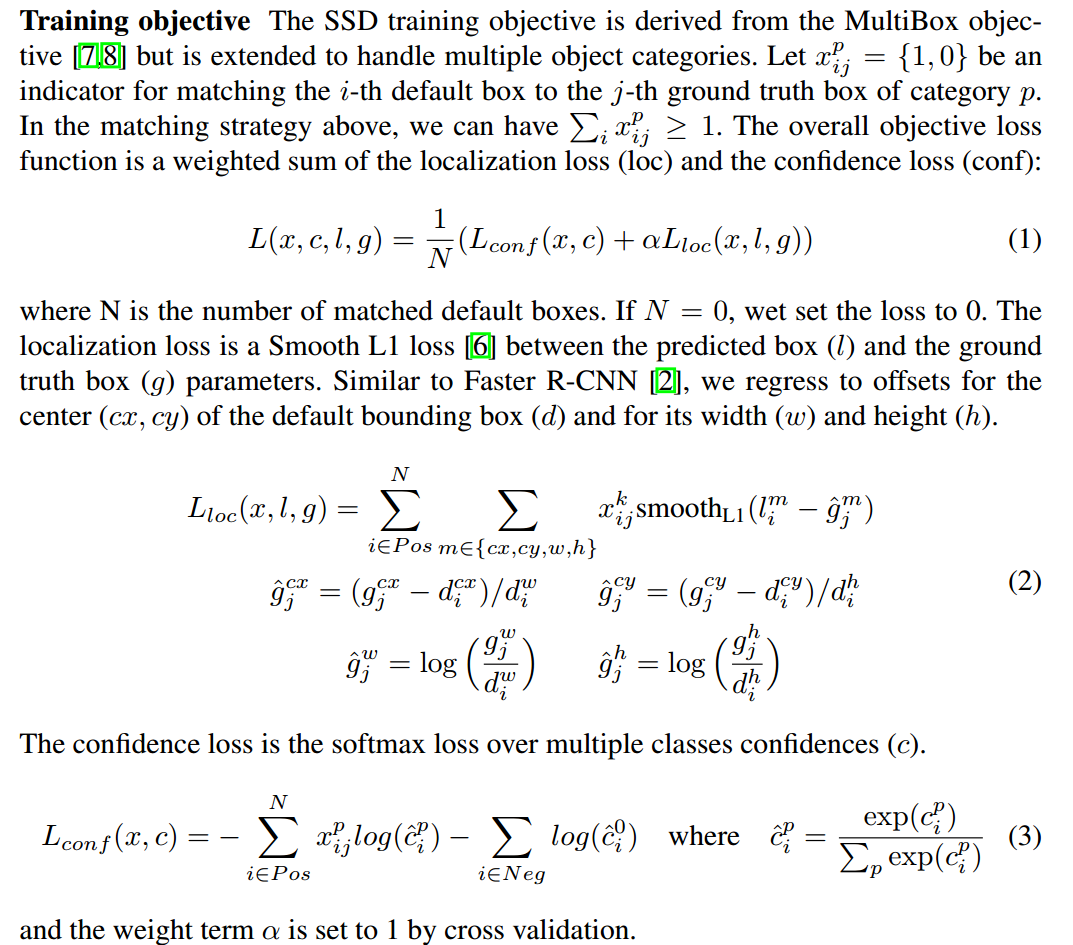
loss计算
第一个要解决的问题就是box匹配的问题.即每一次训练,怎样的预测框算是预测对了?我们需要计算这些模型认为的预测对了的box和真正的ground truth box之间的差异.
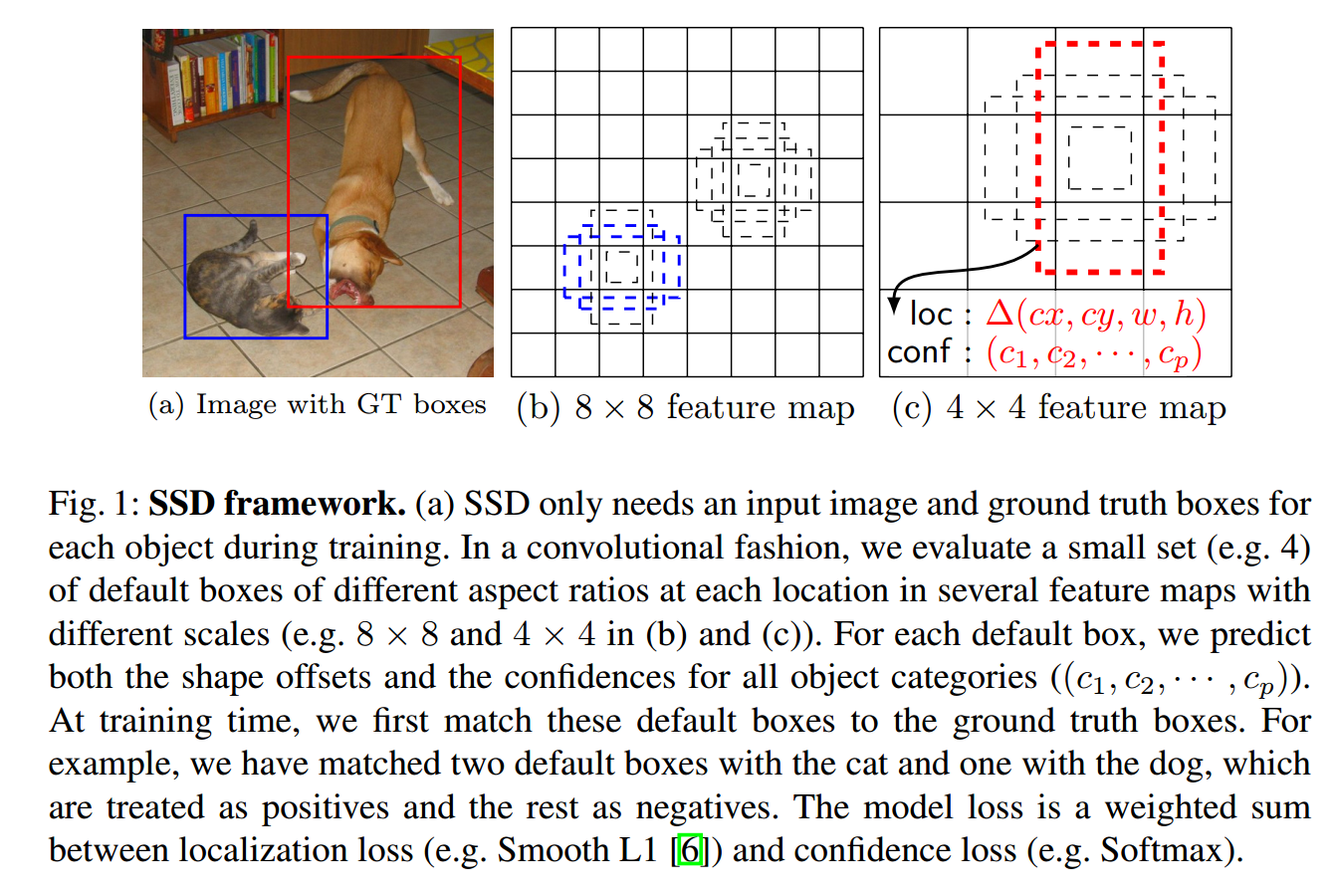
如上所示,猫的ground truth box匹配了2个default box,狗的ground truth box匹配了1个default box.
匹配策略
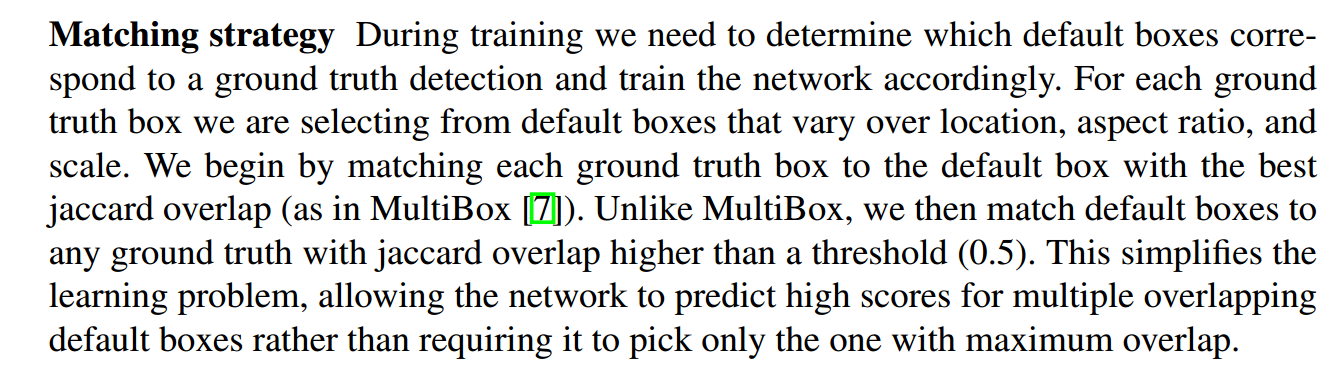
匹配策略是
- 把gt box朝着prior box做匹配,和gt box的IOU最高的prior box被选为正样本
- 任意和gt box的IOU大于0.5的也被选为正样本
有一个问题困扰了我好久,第二步不是包含第一步吗,直到某天豁然开朗,可能所有的prior box与gt box的iou都<阈值,第一步就是为了保证至少有一个prior box与gt box对应
box_utils.py
def match(threshold, truths, priors, variances, labels, loc_t, conf_t, idx):
# jaccard index #[objects_num,priorbox_num]
overlaps = jaccard(
truths,
point_form(priors)
)
# (Bipartite Matching)
# [num_objects,1] best prior for each ground truth
best_prior_overlap, best_prior_idx = overlaps.max(1, keepdim=True) #返回每行的最大值,即哪个priorbox与当前obj gt box的IOU最大
# [1,num_priors] best ground truth for each prior
best_truth_overlap, best_truth_idx = overlaps.max(0, keepdim=True) #返回每列的最大值,即哪个obj gt box与当前prior box的IOU最大
best_truth_idx.squeeze_(0) #best_truth_idx的shape是[1,num_priors],去掉第0维度将shape变为[num_priors]
best_truth_overlap.squeeze_(0) #同上
best_prior_idx.squeeze_(1) #best_prior_idx的shape是[num_objects,1],去掉第一维度变为[num_objects]
best_prior_overlap.squeeze_(1)
best_truth_overlap.index_fill_(0, best_prior_idx, 2) # ensure best prior #把best_truth_overlap第0维度best_prior_idx位置的值的替换为2,以使其肯定>theshold
# TODO refactor: index best_prior_idx with long tensor
# ensure every gt matches with its prior of max overlap
for j in range(best_prior_idx.size(0)):
best_truth_idx[best_prior_idx[j]] = j
matches = truths[best_truth_idx] # Shape: [num_priors,4]
conf = labels[best_truth_idx] + 1 # Shape: [num_priors]
conf[best_truth_overlap < threshold] = 0 # label as background
loc = encode(matches, priors, variances)
loc_t[idx] = loc # [num_priors,4] encoded offsets to learn
conf_t[idx] = conf # [num_priors] top class label for each prior
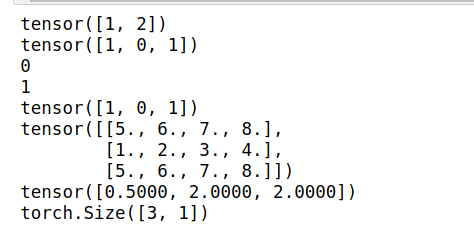
这里的逻辑实际上是有点绕的.给个具体的例子会更好滴帮助你理解.
我们假设一张图片里有2个object.那就有2个gt box,假设计算出3个(实际是8732个)prior box.计算每个gt box和每个prior box的iou即得到一个两行三列的overlaps.
import torch
#假设一幅图里有2个obj,预测出3个box,其iou如overlaps所示
truths = torch.Tensor([[1,2,3,4],[5,6,7,8]]) #2个gtbox 每个box坐标由四个值确定
labels = torch.Tensor([[5],[6]])#2个obj分别属于类别5,类别6
overlaps = torch.Tensor([[0.1,0.4,0.3],[0.5,0.2,0.6]])
#overlaps = torch.Tensor([[0.9,0.9,0.9],[0.8,0.8,0.8]])
best_prior_overlap, best_prior_idx = overlaps.max(1, keepdim=True) #[2,1]
#print(best_prior_overlap)
#print(best_prior_idx) #与目标gt box iou最大的prior box 下标
best_truth_overlap, best_truth_idx = overlaps.max(0, keepdim=True) #返回每列的最大值,即哪个obj gt box与当前prior box的IOU最大
#print(best_truth_overlap) #[1,3]
#print(best_truth_idx) #与prior box iou最大的gt box 下标
best_truth_idx.squeeze_(0) #best_truth_idx的shape是[1,num_priors],去掉第0维度将shape变为[num_priors]
best_truth_overlap.squeeze_(0) #同上
best_prior_idx.squeeze_(1) #best_prior_idx的shape是[num_objects,1],去掉第一维度变为[num_objects]
best_prior_overlap.squeeze_(1)
print(best_prior_idx)
print(best_truth_idx)
#把和gt box的iou最大的prior box的iou设置为2(只要大于阈值就可以了),以确保这个prior box一定会被保留下来.
best_truth_overlap.index_fill_(0, best_prior_idx, 2)
#比如所有的prior box都和gt box1的iou=0.9,prior box2和gt box2的iou=0.8. 我们要确保prior box2被匹配到gt box2而不是gt box1.
#把overlaps = torch.Tensor([[0.9,0.9,0.9],[0.8,0.8,0.8]])试试就知道了
for j in range(best_prior_idx.size(0)):
print(j)
best_truth_idx[best_prior_idx[j]] = j
print(best_truth_idx)
matches = truths[best_truth_idx] #[3,4] 列代表每一个对应的gt box的坐标
print(matches)
print(best_truth_overlap)
conf = labels[best_truth_idx] + 1 #[3,1]每一列代表当前prior box对应的gt box的类别
print(conf.shape)
#conf[best_truth_overlap < threshold] = 0 #过滤掉iou太低的,标记为background
至此,我们得到了matches,即对每一个prior box都找到了其对应的gt box.也得到了conf.即prior box归属的类别.如果iou过低的,类别就被标记为background.
接下来
def encode(matched, priors, variances):
# dist b/t match center and prior's center
g_cxcy = (matched[:, :2] + matched[:, 2:])/2 - priors[:, :2]
# encode variance
g_cxcy /= (variances[0] * priors[:, 2:])
# match wh / prior wh
g_wh = (matched[:, 2:] - matched[:, :2]) / priors[:, 2:]
g_wh = torch.log(g_wh) / variances[1]
# return target for smooth_l1_loss
return torch.cat([g_cxcy, g_wh], 1) # [num_priors,4]
我们比较prior box和其对应的gt box的差异.注意这里的matched的格式是(lefttop_x,lefttop_y,rightbottom_x,rightbottom_y).
所以这里得到的其实是gt box和prior box之间的偏移.
计算loss
对于所有的prior box而言,一共可以分为三种类型
- 正样本
- loss排名靠前的xx个负样本
- 其余负样本
其中正样本即:与ground truth box的iou超过阈值或者iou最大的prior box.
负样本:正样本之外的prior box.
损失函数分为2部分,一部分是坐标偏移的损失,一部分是类别信息的损失.
在计算loc损失的时候,只考虑正样本. 在计算conf损失的时候,即考虑正样本又考虑负样本.并且保持负样本:正样本=3:1.
代码实现在:
multibox_loss.py
class MultiBoxLoss(nn.Module):
def forward(self, predictions, targets):
伪代码可以表述为
#根据匹配策略得到每个prior box对应的gt box
#根据iou筛选出positive prior box
#计算conf loss
#筛选出loss靠前的xx个negative prior box.保证neg:pos=3:1
#计算交叉熵
#归一化处理
- 坐标偏移的loss
pos_idx = pos.unsqueeze(pos.dim()).expand_as(loc_data)
loc_p = loc_data[pos_idx].view(-1, 4) #预测得到的偏移量
loc_t = loc_t[pos_idx].view(-1, 4) #真实的偏移量
loss_l = F.smooth_l1_loss(loc_p, loc_t, size_average=False) #我们回归的就是相对default box的偏移
用smooth_l1_loss. 代码比较简单,不多讲了.
Hard negative mining
在匹配default box和gt box以后,必然是有大量的default box是没有匹配上的.即只有少量正样本,有大量负样本.对每个default box,我们按照confidence loss从高到低排序.我们只取排在前列的一些default box去计算loss,使得负样本:正样本在3:1. 这样可以使得模型更加快地优化,训练更稳定.
关于目标检测中的样本不平衡可以参考https://zhuanlan.zhihu.com/p/60612064
简单滴说就是,负样本使得我们学到背景信息,正样本使得我们学到目标信息.所以二者都需要,并且保持一个合适比例.论文里用的是3:1.
对应代码即MultiBoxLoss.negpos_ratio
# Compute max conf across batch for hard negative mining
batch_conf = conf_data.view(-1, self.num_classes) #[batch*8732,21]
loss_c = log_sum_exp(batch_conf) - batch_conf.gather(1, conf_t.view(-1, 1)) #conf_t的列方向是类别信息
# Hard Negative Mining
loss_c[pos] = 0 # filter out pos boxes for now
loss_c = loss_c.view(num, -1)
_, loss_idx = loss_c.sort(1, descending=True)
_, idx_rank = loss_idx.sort(1)
num_pos = pos.long().sum(1, keepdim=True)
num_neg = torch.clamp(self.negpos_ratio*num_pos, max=pos.size(1)-1)
#得到负样本的index
neg = idx_rank < num_neg.expand_as(idx_rank)
这时候的loss还不是网络的conf loss,并不是论文里的l_conf.
def log_sum_exp(x):
"""Utility function for computing log_sum_exp while determining
This will be used to determine unaveraged confidence loss across
all examples in a batch.
Args:
x (Variable(tensor)): conf_preds from conf layers
"""
x_max = x.data.max()
return torch.log(torch.sum(torch.exp(x-x_max), 1, keepdim=True)) + x_max
这里用到了一个trick.参考https://github.com/amdegroot/ssd.pytorch/issues/203,https://stackoverflow.com/questions/42599498/numercially-stable-softmax
为了避免e的n次幂太大或者太小而无法计算,常常在计算softmax时使用这个trick.
这个函数严重影响了我对loss_c的理解,实际上,你可以把上述函数中的x_max移除.那这个函数
那么loss_c就变为了
loss_c = torch.log(torch.sum(torch.exp(batch_conf), 1, keepdim=True)) - batch_conf.gather(1, conf_t.view(-1, 1))
就好理解多了.
conf_t的列方向是相应的label的index. batch_conf.gather(1, conf_t.view(-1, 1))得到一个[batch*8732,1]的tensor,即只保留prior box对应的label的概率预测信息.
那总体的loss即为所有类别的loss之和减去这个prior box应该负责的label的loss.
得到loss_c以后,我们去得到正样本/负样本的index
# 选出loss最大的一些负样本 负样本:正样本=3:1
# Hard Negative Mining
loss_c = loss_c.view(num, -1) #[batch,8732]
loss_c[pos] = 0 # filter out pos boxes for now
_, loss_idx = loss_c.sort(1, descending=True) #对每张图的priorbox的conf loss逆序排序
print(_[0,:],loss_idx[0]) #[batch,8732] 每一列的值为prior box的index
_, idx_rank = loss_idx.sort(1)
print(_[0,:],idx_rank[0,:]) #[batch,8732] 每一列的值为prior box在loss_idx的位置.我们要选取前loss_idx中的前xx个.(xx=3倍负样本)
num_pos = pos.long().sum(1, keepdim=True)
print(num_pos) #[batch,1] 列的值为每张图的正样本数量
#求得负样本的数量,3倍正样本,如果3倍正样本>全部prior box,则设置负样本数量为prior box数量
num_neg = torch.clamp(self.negpos_ratio*num_pos, max=pos.size(1)-1)
print(num_neg)
#选出loss排名最靠前的num_neg个负样本
neg = idx_rank < num_neg.expand_as(idx_rank)
print(neg)
至此,我们就得到了正负样本的下标.接下来就可以计算预测值与真值的差异了.
loss_c = F.cross_entropy(conf_p, targets_weighted, size_average=False)
# Sum of losses: L(x,c,l,g) = (Lconf(x, c) + αLloc(x,l,g)) / N
N = num_pos.data.sum()
loss_l /= N
loss_c /= N
return loss_l, loss_c
用交叉熵衡量loss. 最后除以正样本的数量,做归一化处理.
https://pytorch.org/docs/stable/nn.html#torch.nn.CrossEntropyLoss
在计算loss前,不需要手动softmax转换成概率值了.
训练
前面已经实现了网络结构创建,loss计算.接下来就可以实现训练了.
实现在train.py
精简后的主要逻辑如下:
ssd_net = build_ssd('train', cfg['min_dim'], cfg['num_classes'])
net = ssd_net
optimizer = optim.SGD(net.parameters(), lr=args.lr, momentum=args.momentum,
weight_decay=args.weight_decay)
criterion = MultiBoxLoss(cfg['num_classes'], 0.5, True, 0, True, 3, 0.5,
False, args.cuda)
for iteration in range(args.start_iter, cfg['max_iter']):
# load train data
images, targets = next(batch_iterator)
# forward
out = net(images)
# backprop
optimizer.zero_grad()
loss_l, loss_c = criterion(out, targets)
loss = loss_l + loss_c
loss.backward()
optimizer.step()
即
- 定义网络结构
- 定义损失函数及反向传播求梯度方法
- 加载训练集
- 前向传播得到预测值
- 计算loss
- 反向传播,更新网络权重参数
涉及到的部分torch中函数用法参考:https://www.cnblogs.com/sdu20112013/p/11731741.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 周边上新:园子的第一款马克杯温暖上架
2014-10-29 oracle中char,vchar,vchar2的区别与联系