pytorch实现yolov3(1) yolov3基本原理
理解一个算法最好的就是实现它,对深度学习也一样,准备跟着https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/一点点地实现yolov3.达到熟悉yolov3和pytorch的目的.
这篇作为第一篇,讲yolov3基本原理.
卷积后的输出
经过basenet(darknet-53)不断的卷积以后得到一个feature map. 我们就用这个feature map来做预测.
比方说原始输入是416*416*3,一通卷积以后得到一个13*13*depth的feature map.
这个feature map的每一个cell都有其对应的感受野.(简单滴说:即当前cell的值受到原始图像的哪些pixel的影响).所以现在我们假设每个cell可以预测出一个boundingbox.boudingbox所框出的object的正中心落于当前cell.
You expect each cell of the feature map to predict an object through one of it's bounding boxes if the center of the object falls in the receptive field of that cell. (Receptive field is the region of the input image visible to the cell. Refer to the link on convolutional neural networks for further clarification).
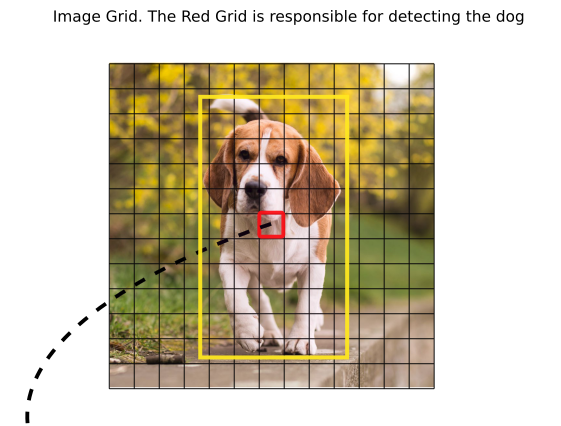
比如上图的红色cell负责预测狗这个object.
feature map的size为N*N*Depth,其中Depth=(B x (5 + C))

B指每个cell预测几个boundingbox. 5=4+1. 4代表用于预测boudingbox的四个值,1代表object score,代表这个boundingbox包含目标的概率,C代表要预测的类别个数.
如何计算predicted box的坐标
Anchor Boxes
anchor box是事先聚类出来的一组值.可以理解为最接近现实的object的宽,高.
yolov3中feature map的每一个cell都预测出3个bounding box.但是只选用与ground truth box的IOU最大的做预测.
预测

bx, by, bw, bh are the x,y center co-ordinates, width and height of our prediction. tx, ty, tw, th is what the network outputs. cx and cy are the top-left co-ordinates of the grid. pw and ph are anchors dimensions for the box.
- bx by bw bh是预测值 代表预测的bouding box的中心点坐标 宽 高
- tx, ty, tw, th 是卷积得到的feature map在depth方向的值
- cx,cy是当前cell左上角坐标
- pw,ph是事先聚类得到的anchors值
上图中的σ(tx)是sigmoid函数,以确保它的值在0-1之间.这样才能确保预测出来的坐标坐落在当前cell内.比如cell左上角是(6,6),center算出来是(0.4,0.7),那么预测的boudingbox的中心就是(6.4,6.7),如果算出来center是(1.2,0.7),那boundingbox的中心就落到了(7.2,6.7)了,就不再是当前cell了,这与我们的假设是相悖的.(我们假设当前cell是它负责预测的object的中心).

objectness score
这个也是由sigmoid限制到0-1之间,表示包含一个object的概率.
Class Confidences
表示当前object属于某一个class的概率. yolov3不再使用softmax得到.因为softmax默认是排他的.即一个object属于class1,就不可能属于class2. 但实际上一个object可能既属于women又属于person.
多尺度检测
yolov3借鉴了特征金字塔的概念,引入了多尺度检测,使得对小目标检测效果更好.
以416*416为例,一系列卷积以后得到13*13的feature map.这个feature map有比较丰富的语义信息,但是分辨率不行.所以通过upsample生成26*26,52*52的feature map,语义信息损失不大,分辨率又提高了,从而对小目标检测效果更好.
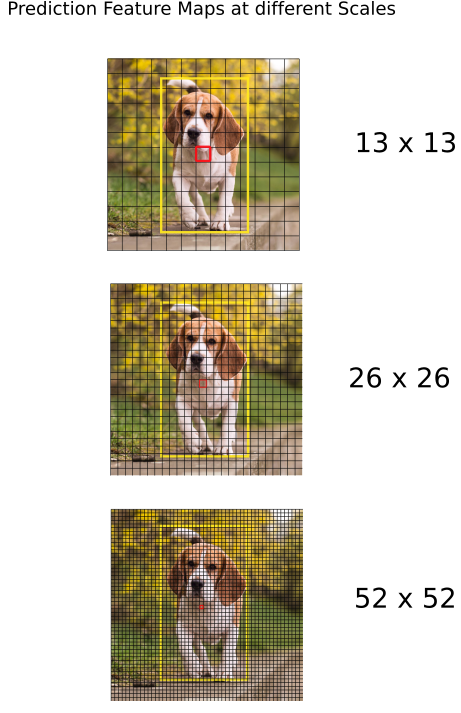
对416 x 416, 预测出((52 x 52) + (26 x 26) + 13 x 13)) x 3 = 10647个bounding boxes.通过object score排序,滤掉score过低的,再通过nms逐步确定最终的bounding box.
nms解释看下这个https://blog.csdn.net/zchang81/article/details/70211851.
简单滴说就是每一轮都标记出一个score最高的,把和最高的这个box类似的box去掉,循环反复,最终就得到了最终的box.
refrence:https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/

