二分图与匹配 I :二分图的最大匹配
引入:什么是二分图,什么是匹配
口头语言描述:一个图,你把他的点集划为两个集合,让每个集合之间的点没有连边,就是一个二分图。
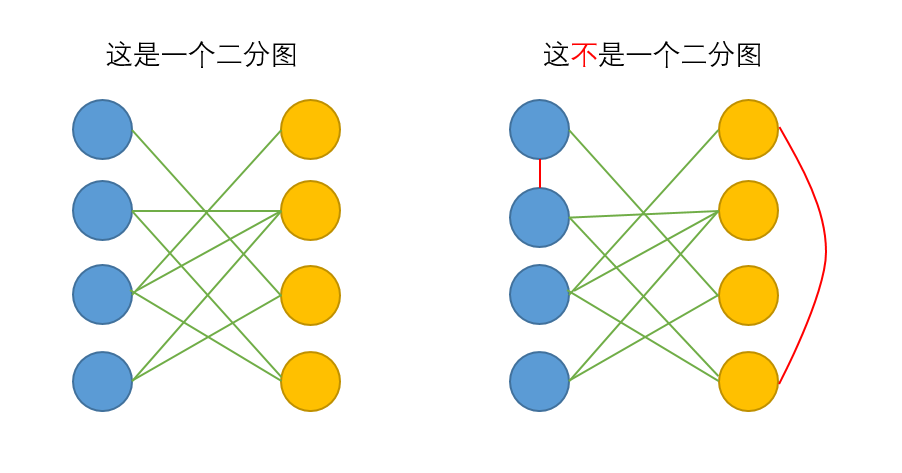
二分图的一个等价定义是:不含有奇数条边的环的图就是一个二分图。
证明:显然,观察每一条路径,都是从一个点集走向另外一个点集,则一个环必定得走偶数次。
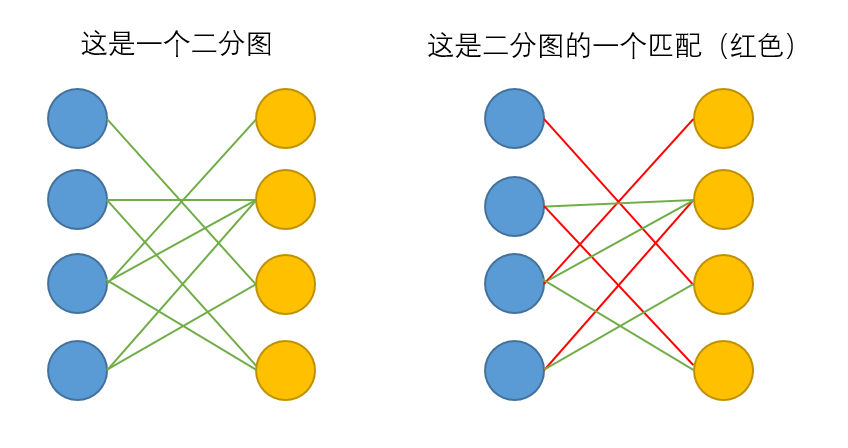
匹配,则是一个边集。在二分图中选择一些边玩连连看游戏,如果选择的边两两没有公共点,这个边集就是原图的一个匹配。
为了方便后面的描述,我们再引入一些概念:
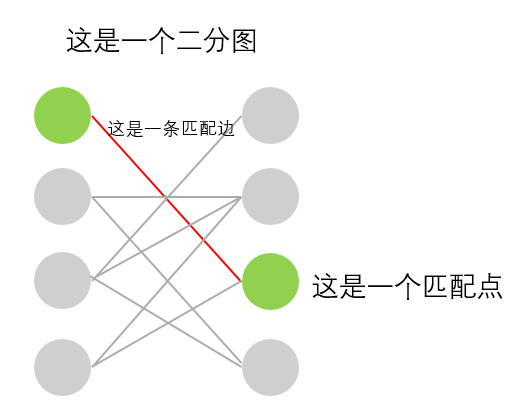
- 匹配点:被匹配边连接的点;
- 匹配边:匹配里的边;
- 非匹配点:没被匹配边连接的点;
- 非匹配边:不在匹配里的边;
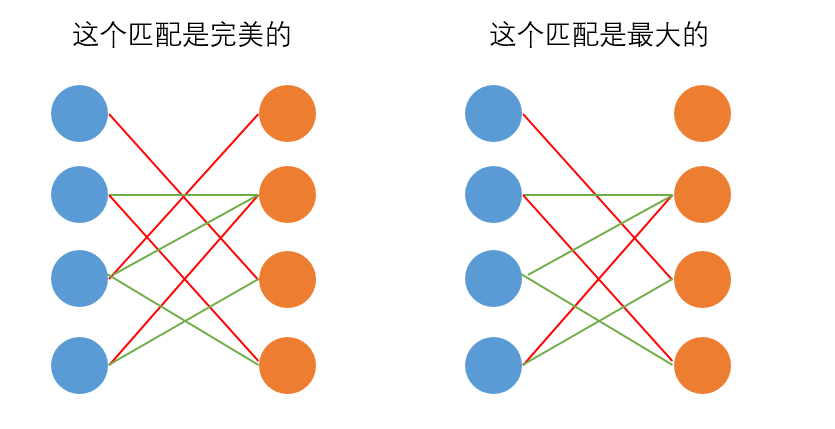
- 最大匹配:一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。
- 完美匹配:如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。
显然,完美匹配一定是最大匹配,但并非每个图都存在完美匹配。
我们有时候希望匹配最大,那该怎么办呢?
解决:匈牙利算法
为了理解这个算法,我们给出几个概念:
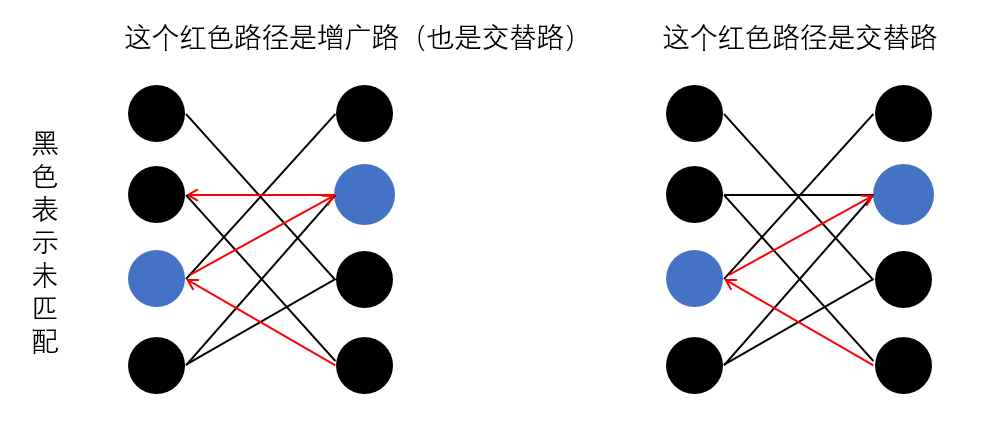
- 交替路:从一个未匹配点出发,依次经过非匹配边,匹配边,非匹配边……的路径;
- 增广路:从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路。
增广路有一个重要特点:非匹配边比匹配边多一条,我们可以通过不停地找增广路来增加匹配中的匹配边和匹配点。找不到增广路时,达到最大匹配(这是增广路定理)。这就是匈牙利算法。
- 从左边第 1 个顶点开始,挑选未匹配点进行搜索,寻找增广路;
- 如果经过一个未匹配点,说明寻找成功。更新路径信息,匹配边数 +1,停止搜索;
- 如果一直没有找到增广路,则不再从这个点开始搜索。事实上,我们可以永久性地把它从图中删去,而不影响结果。
- 由于找到增广路之后需要沿着路径更新匹配,所以我们需要一个结构来记录路径上的点。
代码使用 BFS 探路,复杂度为 \(O(|V||E|)\)。
int Hungarian() {
int ans = 0;
memset(matching, -1, sizeof matching), memset(check, -1, sizeof check);
for (int i = 1; i <= leftnode; ++ i) {
if (matching[i] == -1) { // 点 i 还未被匹配过
// 清空队列,开始对 i 进行探路
while (!q.empty()) q.pop();
q.push(i);
prev[i] = -1;
bool flag = false;
// 开始探路
while(!q.empty() && !flag) {
auto u = Q.front();
for(int i = head[u] ; i; i = G[u].nxt) {
int v = G[i].to;
if(check[v] != i) {
check[v] = i;
Q.push(matching[v]);
if(matching[v] >= 0) prev[matching[v]] = u; // 找到匹配点
else { // 找到未匹配点,交替路变为增广路
flag = true;
int d = u, e = v;
while(d != -1) {
// 一些存边操作
int t = matching[d];
matching[d] = e, matching[e] = d;
d = prev[d], e = t;
}
}
}
}
q.pop();
}
if (matching[i] != -1) ++ ans; // 如果到最后 匹配成功,那么ans ++
}
}
return ans;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号