
病态矩阵与条件数
条件数
本文的阅读等级:高级
当一线性系统受到极微小的扰动即可引发方程解剧烈变化时,我们将无从信任计算结果,便称它是病态系统(见“ 病态系统 ”)。 条件数(condition number) 是矩阵运算误差分析的基本工具,它可以度量矩阵对于数值计算的敏感性和稳定性,也可以用来检定病态系统。 本文通过一个简单的线性方程扰动问题介绍条件数的推导过程,基本推演工具是矩阵范数 


问题一 :考虑线性方程 







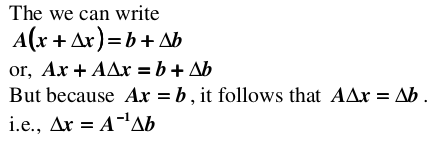
考虑包含扰动及误差的线性方程:
=\mathbf{b}+\delta\mathbf{b}")
与原方程式 =\delta\mathbf{b}")
")
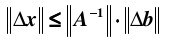
\Vert\le\Vert A^{-1}\Vert\cdot\Vert\delta\ mathbf{b}\Vert")

\ Vert}{\Vert\mathbf{x}\Vert}\le\frac{\Vert A^{-1}\Vert\cdot\Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{x} \Vert}\le\left(\Vert A\Vert\cdot\Vert A^{-1}\Vert\right)\frac{ \Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{b }\Vert}")
另一方面,我们考虑不等式 \Vert\le\Vert A\Vert\cdot\Vert\delta\mathbf{x}\Vert")

^{-1}\frac{\Vert\delta \mathbf{b}\Vert}{\Vert\mathbf{b}\Vert}")
上面二式指出相对误差 
=\Vert A\Vert\cdot\Vert A^{-1}\Vert")
也就是说, 
")

^{-1}\frac{\Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{b}\Vert}\le\frac{\Vert\delta\mathbf{ x}\Vert}{\Vert\mathbf{x}\Vert}\le\kappa(A)\frac{\Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{b}\Vert}")
接着讨论条件数的计算方法。 设 
")








以2-范数(2-norm) 计算的条件数也就为
=\Vert A\Vert_2\cdot\Vert A^{-1}\Vert_2=\frac{\sigma_1}{\sigma_n}\ge 1")
若
(V\Sigma U^T)=U\Sigma^2U^T")
因此 

=\left|\frac{\lambda_1}{\lambda_n}\right|")
又若 

=1")
下面我们进一步讨论奇异值分解与条件数上下界的关系。 奇异值分解的 


考虑 

=\frac{\alpha}{\sigma_1}\mathbf{ v}_1")
=A^{-1}(\beta\mathbf{u}_n)=\frac{\beta}{ \sigma_n}\mathbf{v}_n")
计算向量长度并相除,
\frac{\vert \beta\vert}{\vert\alpha\vert}=\kappa(A)\frac{\Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{b}\Vert}")
得知 

\frac{\vert \beta\vert}{\vert\alpha\vert}=\kappa(A)^{-1}\frac{\Vert\delta\mathbf{b}\Vert}{\Vert\mathbf{b}\Vert}")
考虑下面两个取自“ 病态系统 ”一文的例子:

计算奇异值后代入条件数公式:
&=.978920/.077605=12.614\\ \kappa(B)&=.981991/.000001=981,991\approx 10^{6}\end{aligned}")
此例中, 

")


问题二 :如果线性方程
考虑 
为简化问题,以下假设 

")
}")
性质一 : 
已知
\Vert\le\Vert A^{-1}\Vert\cdot\Vert\delta A\Vert\le\epsilon\Vert A^{-1}\Vert \cdot\Vert A\Vert=k<1")
根据Neumann 无穷级数性质可知 ")
)^{-1}\Vert\le\frac{1}{1-k}")
)= A+\delta A")
性质二 :

将 (\mathbf{x}+\delta\mathbf{x})=\mathbf{b}+\delta\mathbf{b}")

)(\mathbf{x}+\delta\mathbf{x})=\mathbf{x}+A^{-1}(\delta\mathbf{b })")
性质一指出
)^{-1}(\mathbf{x}+A^{-1}(\delta \mathbf{b}))")
利用性质一的不等式,可得
)^{-1}\Vert\cdot(\Vert \mathbf{x}\Vert+\epsilon\Vert A^{-1}\Vert\cdot\Vert\mathbf{b}\Vert)\le\frac{1}{1-k}\left(\Vert\mathbf {x}\Vert+k\frac{\Vert\mathbf{b}\Vert}{\Vert A\Vert}\right)")
但
=\frac{1+k}{1-k}\Vert\mathbf{x}\Vert")
性质三 :
")
性质二的关系式可写为 -A^{-1}(\delta A)(\mathbf{x}+\delta\mathbf{x})")
(\mathbf{x}+\delta\ mathbf{x})\Vert")
利用已知条件与三角不等式,可得

将上式除以 
\frac{\Vert\mathbf{b}\Vert} {\Vert A\Vert\cdot\Vert\mathbf{x}\Vert}+\epsilon\kappa(A)\frac{\Vert\mathbf{x}+\delta\mathbf{x}\Vert}{\Vert \mathbf{x}\Vert}\le\epsilon\kappa(A)\left(1+\frac{1+k}{1-k}\right)=\frac{2\epsilon}{1-k} \kappa(A)")
方程解的相对误差来自 



本文参考:
Gene H. Golub, Charles F. Van Loan,Matrix Computations,2 nd ed.,1989。
____________________________________________________________
1. 病态系统
现在有线性系统: Ax = b, 解方程
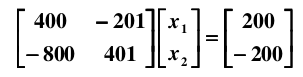
很容易得到解为: x1 = -100, x2 = -200. 如果在样本采集时存在一个微小的误差,比如,将 A 矩阵的系数 400 改变成 401:

则得到一个截然不同的解: x1 = 40000, x2 = 79800.
当解集 x 对 A 和 b 的系数高度敏感,那么这样的方程组就是病态的 (ill-conditioned).
2. 条件数
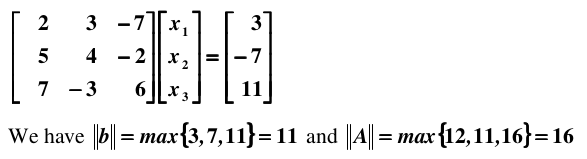
那么,如何评价一个方程组是病态还是非病态的呢?在此之前,需要了解矩阵和向量的 norm, 这里具体是计算很简单的 infinity norm, 即找行绝对值之和最大,举个例子:
infinity norm 具有三角性质:||x+y|| <= ||x|| + ||y||. 理解了这些概念,下面讨论一下衡量方程组病态程度的条件数,首先假设向量 b 受到扰动,导致解集 x 产生偏差:
即有:
同时,由于
综合上面两个不等式:
即得到最终的关系:
如果是矩阵 A 产生误差,同样可以得到:
其中, 条件数定义为:
一般来说,方程组解集的精度大概是  个十进制的位的误差。 比如,IEEE 标准表示的双精度浮点数的有效位是 16 位,如果条件数是 1e+10, 那么得到的结果中只有 6 位是精确的。所以,只有当方程组是良态时,残差 R = Ax - b 才能准确指示解的精度。
个十进制的位的误差。 比如,IEEE 标准表示的双精度浮点数的有效位是 16 位,如果条件数是 1e+10, 那么得到的结果中只有 6 位是精确的。所以,只有当方程组是良态时,残差 R = Ax - b 才能准确指示解的精度。
3. 病态的由来
自己的看法:
线性系统 Ax = b 为什么会病态?归根到底是由于 A 矩阵列向量线性相关性过大,表示的特征太过于相似以至于容易混淆所产生的。举个例子, 现有一个两个十分相似的列向量组成的矩阵 A:
在二维空间上,这两个列向量夹角非常小。假设第一次检测得到数据 b = [1000, 0]^T, 这个点正好在第一个列向量所在的直线上,解集是 [1, 0]^T。现在再次检测,由于有轻微的误差,得到的检测数据是 b = [1000, 0.001], 这个点正好在第二个列向量所在的直线上,解集是 [0, 1]^T。两次求得到了差别迥异的的解集。
4. 与特征值和 SVD 的关系
- 特征值
假设 A 的两个单位特征向量是 x1, x2, 根据特征向量的性质:
上述矩阵 A 的特征值和特征向量分别为:

对于平面上的某一个向量 b,可以分解为两个特征向量的线性组合:
如果 远远大于
, 当 b 点在 x1 方向发生移动, m 值改变, 解集 x 变化不明显, 反之, 如果在 x2 方向移动, n 值改变,解集 x 变化非常大 !可以看到,特征值对解集起到了一个 scaling 的作用。反过来说,如果一个特征值比其它特征值在数量级上小很多,x在对应特征向量 (x2) 方向上很大的移动才能产生b微小的变化.
2. SVD

联系上次学到的 SVD 知识,将 A 分解成三个矩阵的乘积,中间的对角线矩阵也起到了 scaling 的作用。我们按照正向思维来考虑这个问题,现在来了一个解集 x 向量,左乘 A 矩阵等价与左乘 USV^T, x 向量正好等于 V^T 最后一行向量,经过 S 矩阵的 scaling 缩小之后对 b 的影响非常小。也就是说, 解集 x 在 V^T 最后一行的行向量方向自由度最大!自由度越大,越不稳定,极端情况是该方向奇异值为 0, 解集可以在该方向取任意值,这也正好对应了矩阵 A 有零特征值, Ax 在对应特征向量的方向上移动不改变 Ax 的值。
在不同的 norm 下,条件数又可以由最大奇异值与最小奇异值之间的比值,或者最大特征值和最小特征值之间比值的绝对值来表示,详情请参考维基百科
最后, A 的条件数究竟等于多少呢? cond(A) = 2e+06
5. 病态矩阵处理方法
真正的自由是建立在规范的基础上的。病态矩阵解集的不稳定性是由于解集空间包含了自由度过大的方向,解决这个问题的关键就是将这些方向去掉,而保留 scaling 较大的方向,从而把解集局限在一个较小的区域内。在上面的讨论中, A 矩阵的特征向量不一定正交,不适合做新基, SVD 分解正好分解出了正交基,可以选前 k 个 v^T 向量作为正交基。
比如,现在只选取前一个 (0.707, 0.707) 方向作为基,解集局限咋 y = x 这条直线上。直观的解释就是, A 矩阵的两个列向量过于类似,我们就可以将它们等同看待,第一次 b = (1000, 0), 解集是(0.5, 0.5), 第二次 b = (1000, 0.001), 解集还是 (0.5, 0.5).
总结起来,解决 A 病态就是将解集限定在一组正交基空间内,即对于坐标 y, 选择 k 个正交基 Zk,解决问题:
这个就是 reduce-rank model. 具体方法有 truncated SVD 和 Krylov subspace method。
参考资料:
标签: matrix

如果这篇文章帮助到了你,你可以请作者喝一杯咖啡


 浙公网安备 33010602011771号
浙公网安备 33010602011771号