
MAS:Multi-Agent Systems

MAS 中的每个代理都具有各自的属性,但所有代理都会协同工作以实现所需的全局属性。1多 代理系统在完成可能涉及数百甚至数千个代理的大规模复杂任务方面很有价值。2
这一理念的核心是人工智能 (AI) 代理。AI 代理是指通过设计其工作流程和使用可用工具,能够代表用户或其他系统自主执行任务的系统或程序。AI 代理的核心是 大型语言模型 (LLM)。这些智能代理利用 LLM 的高级自然语言处理技术来理解和响应用户输入。代理逐步解决问题并确定何时调用外部工具。AI 代理与传统 LLM 的区别在于使用工具和设计行动计划的能力。代理可用的工具可以包括外部数据集、网络搜索和应用程序编程接口 (API)。与人类决策类似,AI 代理也可以在获取新信息时更新其记忆。信息共享、工具使用和自适应学习使 AI 代理比传统 LLM 更具通用性。
有关单代理系统的更多信息,请参阅我们详细的AI 代理内容。
单智能体智能系统与其环境互动,自主规划、调用工具并产生响应。提供给智能体的工具提供了智能体无法获得的信息。如前所述,此信息可以是通过 API 或其他智能体获取的数据库。这里单智能体系统和多智能体系统是有区别的。当调用另一个智能体作为工具时,该次级智能体是原始智能体环境刺激的一部分。该信息被获取,不再进行进一步的合作。而多智能体系统的不同之处在于它涉及环境中的所有智能体,以模拟彼此的目标、记忆和行动计划。4智能体之间的通信可以是直接的,也可以是通过改变共享环境间接进行的。
多智能体系统中的每个实体在某种程度上都是一个自主智能体。这种自主性通常体现在智能体的规划、工具调用和一般推理上。在多智能体系统中,智能体保持自主性,但也在智能体结构中进行合作和协调。3要解决复杂问题,智能体通信和分布式问题解决是关键。这种智能体交互可以描述为多智能体 强化学习。通过这种学习形式共享的信息可以包括通过传感器或动作获得的瞬时信息。此外,智能体的经验可以以情景信息的形式共享。这些情景可以是感觉、动作和学习到的策略的序列。最后,智能体可以实时分享他们的经验,以防止其他智能体重复学习相同的策略。5
单个代理本身就很强大。它们可以创建子任务、使用工具并通过交互进行学习。多代理系统的集体行为增加了准确性、适应性和可扩展性的潜力。由于共享资源、优化和自动化的池更大,多代理系统往往比单代理系统表现更好。多个代理不必学习相同的策略,而是可以共享学习到的经验以优化时间复杂性和效率。5
集中式网络
多代理系统可以在各种架构下运行。在集中式网络中,中央单元包含全局知识库,连接代理并监督其信息。这种结构的优势在于代理之间易于沟通且知识统一。集中式的弱点在于对中央单元的依赖;如果中央单元发生故障,整个代理系统就会发生故障。6
去中心化网络
分散式网络中的代理与其相邻的代理共享信息,而不是全局知识库。分散式网络的一些优点是稳健性和模块化。由于没有中央单元,一个代理的故障不会导致整个系统故障。分散式代理面临的一个挑战是协调其行为以造福其他合作代理。7

在多智能体系统中组织智能体的方法还有很多,包括:
层次结构
层次结构呈树状,包含具有不同自主性级别的代理。在简单的层次结构中,一个代理可以拥有决策权。在统一的层次结构中,责任可以分配给多个代理。8
全子结构
在这种架构类型中,代理被分组为全子层级。全子层级是指没有其组件就无法运作的实体。例如,人体就是全子层级,因为如果没有功能正常的器官,人体就无法运作。9同样 ,在全子多代理系统中,主导代理可以拥有多个子代理,同时看起来像是一个单一实体。8这些 子代理也可以在其他全子层级中发挥作用。这些层级结构是自组织的,通过子代理的协作来实现目标。
联盟结构
当团队中单个智能体表现不佳时,联盟会有所帮助。在这种情况下,智能体会暂时联合起来以提高效用或绩效。一旦达到预期绩效,联盟就会解散。在动态环境中维持这些联盟可能会变得困难。重组通常是提高绩效的必要条件。9
团队
团队的结构与联盟相似。在团队中,代理会合作以提高团队的绩效。与联盟不同,团队中的代理不会独立工作。团队中的代理彼此依赖性更强,其结构比联盟更具层次性。8
多智能体系统中的智能体行为通常反映自然界中发生的行为。以下智能体行为可适用于多软件和多机器人智能体。
植绒
多智能体系统中的集体行为可能类似于鸟类、鱼类和人类的行为。在这些系统中,智能体共享一个目标,需要某种组织来协调其行为。群体行为属于定向同步,这些群体的结构可以用以下启发式方法描述: 10
- 分离:尝试避免与附近的代理发生碰撞。
- 对齐:尝试匹配附近代理的速度。
- 凝聚力:尝试保持与其他代理的密切联系。
在软件代理的背景下,这种协调对于管理铁路系统等交通网络的多代理系统至关重要。
蜂拥而至
多智能体系统中智能体的空间定位可以与自然界中发生的群体运动相比较。例如,鸟类通过适应邻近的鸟类来同步飞行。从技术角度来看,群体运动是软件智能体之间出现的具有分散控制的自组织和聚合。11群体 运动的一个好处是可以训练一个操作员来管理一群智能体。与为每个智能体训练一个操作员相比,这种方法的计算成本更低,而且更可靠。12
多智能体系统的用例
多智能体系统可以解决许多复杂的现实任务。适用领域的一些示例包括:
多智能体系统可用于管理交通系统。多智能体系统的特点是能够协调复杂的交通系统,包括通信、协作、规划和实时信息访问。可能受益于 MAS 的分布式系统包括铁路系统、卡车分配和访问同一港口的船舶。13
多智能体系统可用于医疗保健领域的各种特定任务。这些基于智能体的系统可以通过基因分析帮助预测和预防疾病。癌症医学研究可能就是其中一种应用。14此外,多智能体系统可以作为预防和模拟流行病传播的工具。这种预测是通过使用流行病学信息神经网络和机器学习 (ML)技术来管理大型数据 集来实现的 。这些发现可能会影响公共卫生和公共政策。15
多智能体系统有助于加强国防系统。潜在威胁既包括物理国家安全问题,也包括网络攻击。多智能体系统可以使用其工具来模拟潜在攻击。海上攻击模拟就是一个例子。这种场景需要智能体以团队形式工作,以捕捉入侵的恐怖分子船只和国防船只之间的互动。17此外 ,通过以合作团队的形式工作,智能体可以监控网络的不同区域,以检测传入的威胁,例如 分布式拒绝服务 (DDoS) 泛洪攻击。18
多智能体系统有几个特点,可以提供以下优势:
灵活性
多智能体系统可以通过添加、删除或调整智能体来适应不同的环境。
可扩展性
多个代理之间的合作可以形成更大的共享信息池。这种合作使多代理系统能够解决比单代理系统更复杂的问题和任务。
领域专业化
单代理系统需要一个代理在各个领域执行任务,而多代理系统中的每个代理可以拥有特定领域的专业知识。
更出色的性能
多智能体框架往往比单一智能体表现更好。19这 是因为智能体可用的行动计划越多,学习和反思就越多。人工智能智能体结合了其他具有相关领域专长的人工智能智能体的知识和反馈,可用于信息合成。人工智能智能体的这种后端协作和填补信息空白的能力是智能体框架所独有的,这使它们成为人工智能领域的强大工具和有意义的进步。
设计和实施多智能体系统面临着几个挑战,包括:
代理故障
建立在相同 基础模型上的多智能体系统 可能会遇到相同的缺陷。这些弱点可能会导致所有相关智能体出现系统范围的故障,或暴露出易受攻击的弱点。20这凸显了数据治理在构建基础模型中的重要性,以及全面培训和测试流程的必要性。
协调复杂性
构建多智能体系统的最大挑战之一是开发能够相互协调和协商的智能体。这种合作对于多智能体系统的正常运行至关重要。
不可预测的行为
在分散式网络中自主独立地执行任务的代理可能会遇到冲突或不可预测的行为。在这些情况下,检测和管理大型系统内的问题可能会很困难。
什么是多智能体系统 (MAS)
多智能体规划将传统的人工智能规划范式扩展到多个智能体(每个智能体都拥有不同的能力、知识和目标)相互作用和协作以实现共同或相互关联的目标的场景。这些智能体可以以各种形式体现,包括软件智能体、机器人或人机混合系统。
多智能体系统 (MAS) 由环境中的多个交互智能体组成。MAS 中的每个智能体都是独立的,因此它可以自行行动并根据其观察结果和目标做出决策。这些智能体之间的交互可以是合作的、竞争的或中立的,具体取决于系统的设计和目标。MAS 的主要目标是处理由于复杂性、规模或对专业知识的需求而难以甚至无法由单个智能体解决的问题。
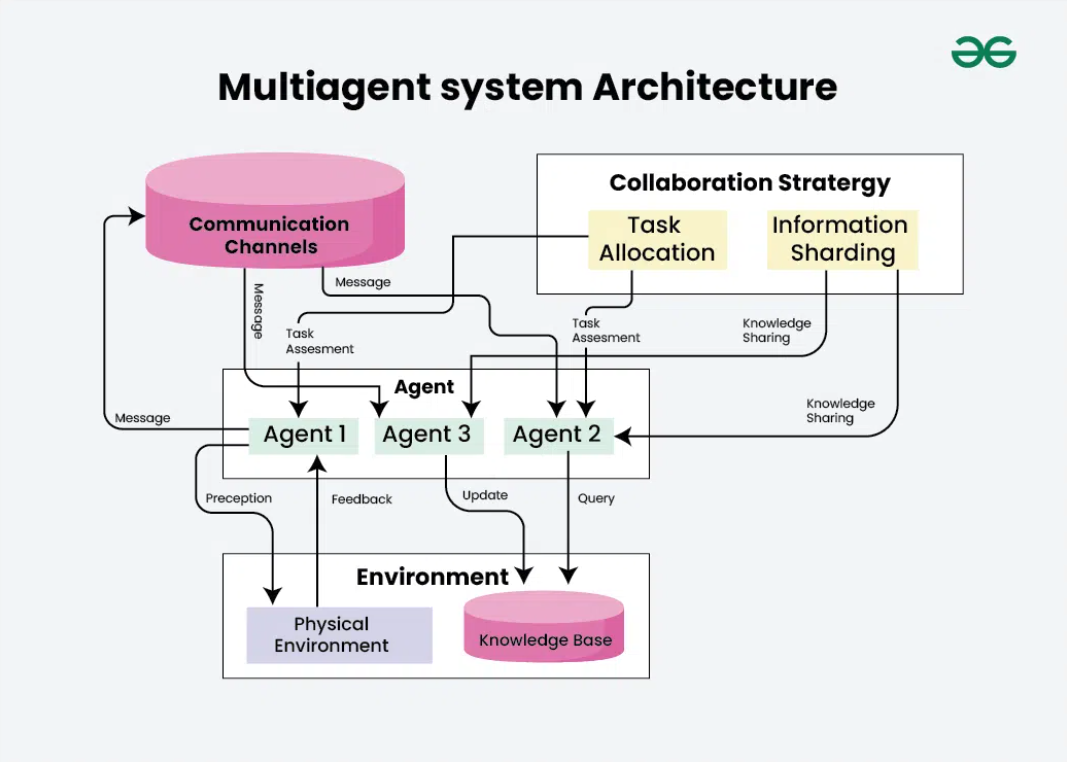
多智能体规划组件
多智能体规划的组成部分大致可以分为四个部分。
多智能体规划的组成部分
- 代理:代理在多代理系统中是自主管理的。此类传感器可以感知环境,执行器可以处理动作。代理可以设计为具有内部流程(例如算法或学习机制)以便采取行动。
- 环境:多智能体规划中的环境是智能体工作的环境。环境的特征会随着时间的变化而变化。复杂性来自于环境的规模、连接性和不可预测性。
- 通信:多智能体规划的一个重要方面是智能体通过通信传递信息和同步其动作的能力。它由诸如消息传递或共享内存等技术组成。充分的通信是智能体进行团队工作、同步和解决冲突的先决条件。
- 协作:协作策略旨在鼓励个人之间的互动和联合表现。这包括任务共享、信息交换、冲突管理和团队建设。共同努力可以提高集体智慧和整体系统效率。
多智能体规划系统架构
多智能体规划系统的核心包括:
- 目标规范:代理分组/协调,为一个目标或目标付出努力。
- 知识共享:例如,各特派团可以交换重要的情报,这些情报可以成为决策不可或缺的一部分。
- 行动协调:在避免冲突和协同作用的情况下,代理之间一致地采取细致的行动。
- 适应:策略包括计划克服可能不断出现的不断变化的挑战或目标并具有适应能力
多智能体规划的类型
- 集中规划:在集中规划的情况下,一个单元或中央控制器根据整个系统的状态决定所有代理该做什么。这种处理协调问题的方法使协调变得更容易,但同时,它可能变成瓶颈和单点故障。
- 分散规划:分散规划是指每个代理根据本地可用信息和与其他代理有限的通信做出自己的决策的过程。这种方法应该更加稳健和可扩展,但很难进行适当的协调。
- 分布式规划:所谓的分布式规划是一种混合方法,其中代理必须共享一些信息并调整其计划以实现共同的世界目标。这种集中式和分散式方法的优点的结合,试图从这两种系统中发挥出最佳效果,并创造出对协调和自主都必不可少的因素。
多智能体规划技术
- 分布式问题解决算法:这些算法中的代理将复杂的问题分解为易于处理的子任务,然后代理将这些子任务分配给它们自己。每个代理都处理自己的任务,然后与其他代理交互,以保证一致性和连贯性。
- 博弈论:博弈论为研究智能体之间的战略关系提供了工具。它是理解智能体竞争和合作行为的关键,有助于智能体在多智能体环境中做出最佳决策。
- 多智能体学习:多智能体学习过程基于智能体通过其经验和与其他智能体交互来提高其性能。以下方法(例如强化学习)使智能体能够适应不断变化的环境和不断变化的目标。
- 通信协议:结构化的代理之间的通信和协调,具有明确的信息交换和同步协议,是代理之间交换信息和保持同步的工具。协议是保证以相同方式交换和感知消息的规范,因此它们使协作成为可能。
多智能体规划问题:协调多个机器人进行仓库管理
想象一下一个仓库,其中多个机器人负责挑选和放置物品以满足客户订单。
.webp)
机器人系统是一个复杂的框架,旨在通过机器人代理的协调努力来优化仓库运营。让我们分解一下它的组件和功能:
机器人:
- 属性:
- id:每个机器人的唯一标识符。
- currentLocation:机器人在仓库内的当前位置。
- task:分配给机器人的具体任务。
- 方法:
- pickItem(item,location):机器人从指定位置挑选物品。
- placeItem(item, location):将物品放置到指定位置。
- AvoidCollision():确保机器人避免与其他机器人或障碍物发生碰撞。
- updatePlan():根据新数据或环境变化更新任务计划。
目标规范:
主要目的是确保快速完成客户订单。子目标包括减少行程时间和防止车辆相撞。
- definePrimaryGoal():设置机器人操作的主要目标。
- defineSubGoals():将主要目标细化为子目标以指导机器人动作。
行动协调:
机器人将通过使用分布式算法来确定要拾取哪些物品以及它们将采取的路径。协调可确保两个机器人不会发生碰撞或同时玩同一个物品。
- deliverTasks():根据机器人的状态和位置为其分配任务。
- calculatePaths():计算机器人的有效路线,以最大限度地减少行程时间并避免冲突。
- synchronizeActions():协调机器人之间的动作时间,以确保顺利运行。
知识共享:
机器人通过中央数据库传递有关其位置、物品位置和订单状态的信息。
- shareRobotLocations():分享机器人位置以防止碰撞并优化路线。
- shareItemLocations():分发有关仓库内物品位置的信息。
- shareOrderStatus():传达订单状态以方便更新和客户服务。
仓库:
包含有关订单、物品和机器人操作的信息。
- updateOrderStatus(order, status):更新系统中的订单状态。
- updateItemLocation(item, location):移动后更新物品位置。
- updateRobotLocation(robot, location):跟踪并更新机器人位置。
集中式数据库:
充当操作数据的存储库,提供数据访问和更新的中心点。
- storeRobotLocation(机器人:机器人,位置:位置)
- storeItemLocation(项目:项目,位置:位置)
- storeOrderStatus(订单:订单,状态:状态)
- 获取项目位置()
- 获取机器人位置()
- 获取订单状态()
适应性:
机器人根据仓库环境的实时信息(例如新订单或物品位置的变化)不断调整计划。
- 更新计划实时()
- 处理新订单()
- 调整环境变化()
机器人与集中式数据库交互以检索和更新信息。知识共享和行动协调机制可确保高效运作并防止冲突/错误。本质上,C Robot 系统在仓库环境中协调机器人代理的同步舞蹈,利用数据驱动的决策和智能协调来优化效率和生产力。
人工智能中多智能体规划的优势
采用多智能体规划具有以下几个优点:
- 效率:在所有代理之间划分任务可以加速已经运行的解决问题和做出决策的方法和流程。
- 稳健性:共享智能提高了系统可靠性,即使一个或几个代理出现故障和/或环境发生变化,仍能实现无缝运行。
- 可扩展性:多代理系统的分散式设计带来了可扩展性优势,因为可以轻松添加更多代理或组件而不会遇到集成问题。
- 灵活性:代理的智能和通信系统特性有助于立即做出改变以对不断变化的条件做出适当的反应。
多智能体规划在人工智能中的应用
多智能体规划在众多领域有着广泛的应用,其中包括:
- 机器人技术:协调多个机器人
多智能体规划是机器人技术中的一个限定词,因为它可以帮助机器人达成一致并共同工作以完成不同的工作。例如,这包括对未知地形的探索任务、监控和监视任务,以及机器人协同组装的协作制造流程。通过使用多智能体规划,机器人能够轻松完成任务、防止碰撞并进行团队合作以达成妥协。 - 交通管理:交通流优化
多代理规划系统领域的交通管理使系统达到最佳交通流量并缓解拥堵。交通信号灯、汽车和控制系统等机构是设计交叉路口流量和交通运动协调过程中的合作伙伴。通过部署协同控制方案(例如自适应信号时间或动态路由方法),多代理系统可以实现更好的交通流量、缩短旅行时间并解决拥堵问题。 - 供应链管理:规划物流
多智能体规划是供应链的支柱,它将各个方面联系在一起,并协调集成生态系统内的物流和运营。负责仓库、配送中心、供应商和运输车辆的智能体共同努力,提高库存管理效率,减少物流流程,并按时成功交付货物。另一方面,多智能体系统通过需求预测、库存优化和路线规划采用协作方法,从而提高供应链的整体效率、降低成本和提高客户满意度。 - 多人游戏:游戏策略智能代理
在有多个参与者的游戏中,多智能体规划用于构建具有高智能水平的机器人,使游戏玩法更具战略性,社区本身更具互动性。游戏角色或实体的代理在游戏环境(也称为游戏星球)中工作和战斗。他们做出战术决策,这些决策旨在为自己的团队确保联盟和合作等优势,并根据游戏的基调和条件进行自我调整。 - 智能电网:最坏情况下的能源供应减少。
智能电网整合了多个规划代理,确保在复杂的电力网络中很好地协调能源的分配和消耗。代表发电单位、消费者、存储单元和电网控制系统的代理协同工作,使供需达到平衡水平,管理电网稳定性,并鼓励节约能源和提高效率。多代理协调机制系统以需求响应程序、分布式能源资源管理和负载平衡算法的形式出现,有助于提高电网可靠性、整合可再生能源和能源技术的可持续性。
人工智能中多智能体规划的挑战与局限性
尽管多智能体规划前景广阔,但它仍面临着一些挑战和限制,包括:
- 沟通开销:许多代理之间的协作在很大程度上涉及数值和资源分配成本的支出。
- 可扩展性问题:将流程超级扩展以涉及大量参与者或复杂环境可能会成为计算能力和物流限制方面的绊脚石。
- 协调复杂性:通过正确的算法和策略,实现知名参与者的参与可能会变得更容易、更高效。
- 隐私和安全:作为流量绑定要素之一的机密信息的存在引起了成员对数据机密性和安全风险的争论。
结论
多智能体规划被称为人工智能的主要前沿领域,它赋予系统集体解决问题和实现共同目标的能力。随着技术的进步和新解决方案的引入,多智能体系统将在面对和解决复杂的现实问题方面占据重要地位。
人工智能中多智能体规划的常见问题解答
问:人工智能中的多智能体规划是什么?
人工智能中的多智能体规划是指协作和利用多个智能体的能力,共同努力实现同一目标或解决复杂的问题。它比传统的人工智能规划更进一步,涵盖了众多智能体在随时间变化的环境中的行为情况。
问:多智能体规划的组成部分是什么?
多智能体规划的因素包括智能体(自主实体)、环境(上下文背景)、通信机制(交换信息)和协作策略(智能体之间的协同工作和协调)。
问:多智能体规划有什么优点?
多学科规划带来了一些好处,例如可以更快地解决问题、具有处理错误的稳健性、可扩展以解决更大的问题以及具有适应变化的灵活性。
问:多智能体规划使用了哪些技术?
多智能体规划所采用的技术包括分布式问题求解算法、博弈论、多智能体学习以及为帮助智能体之间协调和决策而建立的通信协议。
问:多智能体规划有哪些应用?
多智能体规划在机器人(团队机器人)、交通管理(综合交通优化)、物流(物流一体化)、多人游戏(设计智能智能体)、智能电网(电网优化)等领域有着广泛的应用。
问:多智能体规划面临哪些挑战?
多智能体规划的挑战包括克服通信开销、处理可扩展性、解决协调复杂性以及解决在智能体之间共享信息时出现的隐私和安全问题。

如果这篇文章帮助到了你,你可以请作者喝一杯咖啡


 浙公网安备 33010602011771号
浙公网安备 33010602011771号