
Linux驱动:输入子系统(input-subsystem) 分析
Linux驱动:输入子系统 分析
参考:
- https://www.cnblogs.com/lifexy/p/7542989.html
- https://blog.csdn.net/myselfzhangji/article/details/102313094
- https://www.cnblogs.com/linux-37ge/articles/10212377.html
- http://blog.chinaunix.net/uid-31087949-id-5788752.html
- https://www.jianshu.com/p/e9cfae59e3df
- https://www.cnblogs.com/lcw/p/3294356.html
- https://www.cnblogs.com/lknlfy/p/3275875.html
介绍
设计背景
以前我们写一些输入设备(键盘、鼠标等)的驱动都是采用字符设备、混杂设备处理的。问题由此而来,Linux开源社区的大神们看到了这大量输入设备如此分散不堪,实现了一种机制,可以对分散的、不同类别的输入设备进行统一的驱动,这也就是输入子系统。
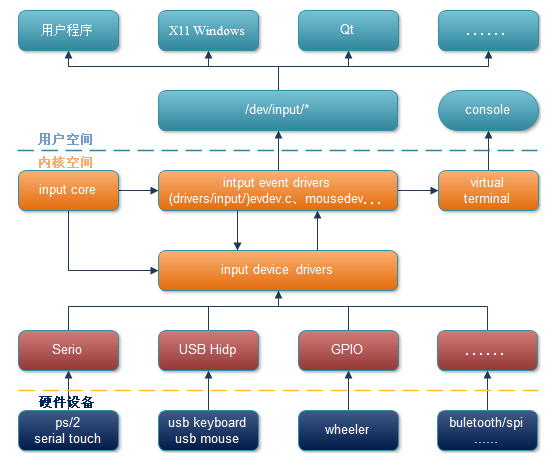
Linux内核为了能够处理各种不同类型的输入设备,(比如 触摸屏 ,鼠标 , 键盘 , 操纵杆 ),设计并实现了为驱动层程序的实现提供统一接口函数;为上层应用提供试图统一的抽象层 , 即是Linux 输入子系统 。
例如,在终端系统中,我们不需要去管有多少个键盘,多少个鼠标。应用程序只要从输入子系统中去取对应的事件(按键,鼠标移位等)就可以了。而底层设备也不需要直接对接应用程序,只要处理并处理对应的事件即可。
引入输入子系统的好处:
- 统一了物理形态各异的相似的输入设备的处理功能。例如,各种鼠标,不论PS/2、USB、还是蓝牙,都被同样处理。
- 提供了用于分发输入报告给用户应用程序的简单的事件(event)接口。你的驱动不必创建、管理/dev节点以及相关的访问方法。因此它能够很方便的调用输入API以发送鼠标移动、键盘按键,或触摸事件给用户空间。X windows这样的应用程序能够无缝地运行于输入子系统提供的event接口之上。
- 抽取出了输入驱动的通用部分,简化了驱动,并提供了一致性。例如,输入子系统提供了一个底层驱动(成为serio)的集合,支持对串口和键盘控制器等硬件输入的访问。
一句话概括,输入子系统是所有I/O设备驱动与应用程序之间的中间层。
框架
linux输入子系统(linux input subsystem)由三层实现,分别为:
- 输入子系统 设备驱动层(Driver):
对于输入子系统设备驱动层而言,主要实现对硬件设备的读写访问,中断设置,并把硬件产生的事件转换为核心层定义的规范提交给事件处理层。
将底层的硬件输入转化为统一事件形式,向输入核心(Input Core)汇报。
- 输入子系统 核心层(Input Core):
对于核心层而言,为设备驱动层提供了规范和接口。设备驱动层只要关心如何驱动硬件并获得硬件数据(例如按下的按键数据),然后调用核心层提供的接口,核心层会自动把数据提交给事件处理层。
它承上启下:
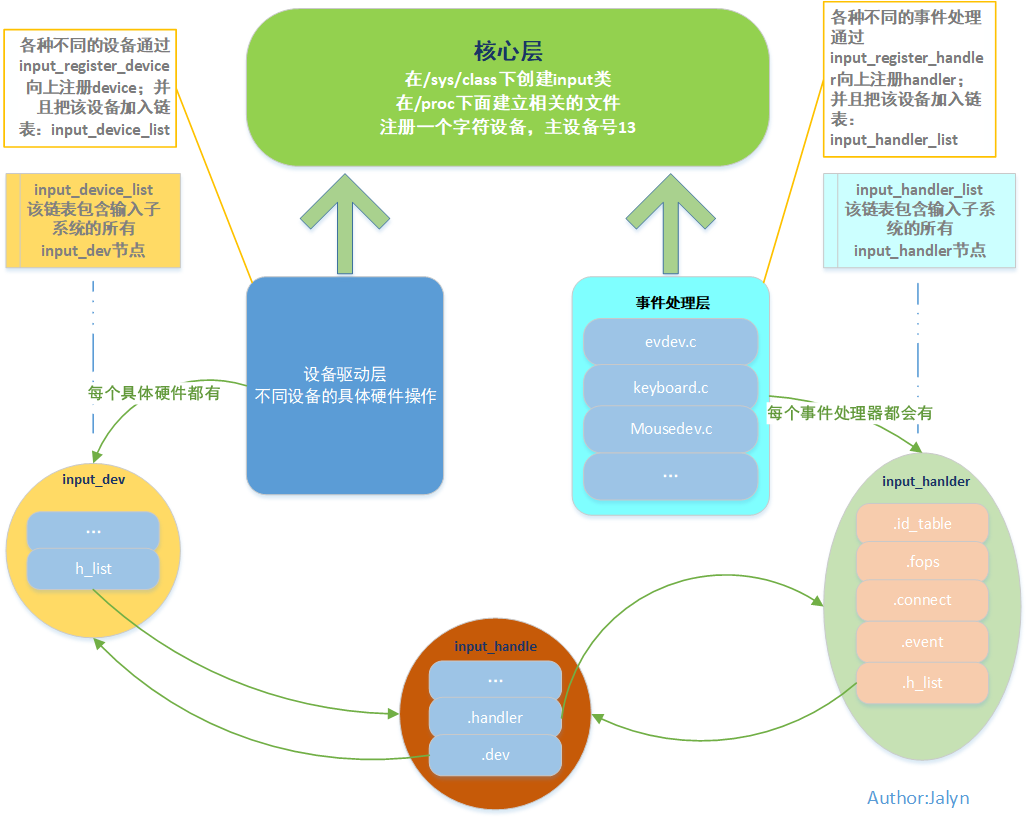
- 为驱动层提供输入设备注册与操作接口,如:input_register_device;
- 通知事件处理层对事件进行处理;在/proc下产生相应的设备信息。
- 输入子系统 事件处理层(Event Handler)。
对于事件处理层而言,则是用户编程的接口(设备节点),并处理驱动层提交的数据处理。
主要是和用户空间交互(Linux中在用户空间将所有的设备都当作文件来处理,由于在一般的驱动程序中都有提供fops接口,以及在/dev下生成相应的设备文件nod,这些操作在输入子系统中由事件处理层完成)。
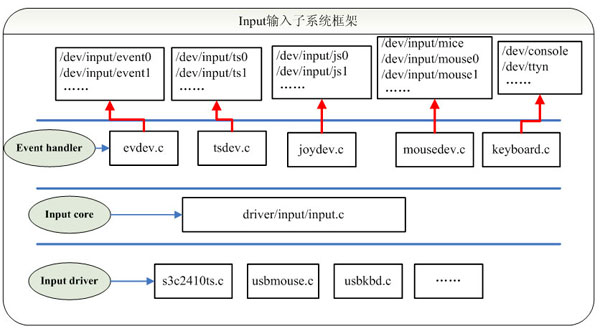
/dev/input/下显示的是已经注册在内核中的设备编程接口,用户通过open这些设备文件来打开不同的输入设备进行硬件操作。
事件处理层为不同硬件类型提供了用户访问及处理接口。例如当我们打开设备/dev/input/mice时,会调用到事件处理层的Mouse Handler来处理输入事件,这也使得设备驱动层无需关心设备文件的操作,因为Mouse Handler已经有了对应事件处理的方法。
输入子系统由内核代码drivers/input/input.c构成,它的存在屏蔽了用户到设备驱动的交互细节,为设备驱动层和事件处理层提供了相互通信的统一界面。
由上图可知输入子系统核心层提供的支持以及如何上报事件到input event drivers。
内核:v3.10
核心层Input Core
路径:deivers/input/input.c
核心层 实现了:
- 在入口函数中申请主设备号,注册进内核
- 提供
input_register_device用于注册device;input_register_handler函数注册handler处理器; - 提供
input_register_handle函数用于注册一个事件处理,代表一个成功配对的input_dev和input_handler;
入口函数
申请主设备号的事情就是input_init完成的;毕竟,输入子系统是作为一个驱动模块存在。
// include/uapi/linux/major.h:29:#define INPUT_MAJOR 13
static int __init input_init(void)
{
int err;
err = class_register(&input_class); //(1)注册类,放在/sys/class
if (err) {
pr_err("unable to register input_dev class\n");
return err;
}
err = input_proc_init(); //在/proc下面建立相关的文件
if (err)
goto fail1;
err = register_chrdev_region(MKDEV(INPUT_MAJOR, 0),
INPUT_MAX_CHAR_DEVICES, "input"); // //(2)注册驱动,主设备号为13
if (err) {
pr_err("unable to register char major %d", INPUT_MAJOR);
goto fail2;
}
return 0;
fail2: input_proc_exit();
fail1: class_unregister(&input_class);
return err;
}
// ... ...
subsys_initcall(input_init);
module_exit(input_exit);
注册class
class_register时用到了这个类,最终会在/sys/class/input中出现。
struct class input_class = {
.name = "input",
.devnode = input_devnode,
};
至于input core只注册了一个类,而没有继续注册对应的设备;是因为:
核心层作为一个中转层存在,不涉及具体硬件设备的注册,倒是更符合他存在的逻辑。
设备的注册到底会在Input driver 还是Event hanlder呢?
注册proc
这里用到了proc注册的接口
static const struct file_operations input_handlers_fileops = {
.owner = THIS_MODULE,
.open = input_proc_handlers_open,
.read = seq_read,
.llseek = seq_lseek,
.release = seq_release,
};
static int __init input_proc_init(void)
{
struct proc_dir_entry *entry;
proc_bus_input_dir = proc_mkdir("bus/input", NULL);
if (!proc_bus_input_dir)
return -ENOMEM;
entry = proc_create("devices", 0, proc_bus_input_dir,
&input_devices_fileops);
if (!entry)
goto fail1;
entry = proc_create("handlers", 0, proc_bus_input_dir,
&input_handlers_fileops);
if (!entry)
goto fail2;
return 0;
fail2: remove_proc_entry("devices", proc_bus_input_dir);
fail1: remove_proc_entry("bus/input", NULL);
return -ENOMEM;
}
只是纯粹的打印信息,之前的一些操作已经没有在proc子系统中进行处理了。
接口函数
| 层 | 功能 | 接口 |
|---|---|---|
| 设备驱动层 | 向核心层注册一个输入设备input device | input_register_device |
| 事件处理层 | 注册一个输入事件处理器 input handler | input_register_handler |
| 事件处理层 | 向内核注册一个handle结构 | input_register_handle |
device与handler匹配
input core 层在中间,承上启下完成了 device 与 handler的匹配。
我们看看是怎么实现的。
驱动层注册device
input_dev对象
struct input_dev {
void *private; //输入设备私有指针,一般指向用于描述设备驱动层的设备结构
const char *name; // 提供给用户的输入设备的名称
const char *phys; // 提供给编程者的设备节点的名称 文件路径,比如 input/buttons
const char *uniq; // 指定唯一的ID号,就像MAC地址一样
struct input_id id;//输入设备标识ID,用于和事件处理层进行匹配
unsigned long evbit[NBITS(EV_MAX)]; //位图,记录设备支持的事件类型(可以多选)
/*
* #define EV_SYN 0x00 //同步事件
* #define EV_KEY 0x01 //按键事件
* #define EV_REL 0x02 //相对坐标
* #define EV_ABS 0x03 //绝对坐标
* #define EV_MSC 0x04 //其它
* #define EV_SW 0x05 //开关事件
* #define EV_LED 0x11 //LED事件
* #define EV_SND 0x12
* #define EV_REP 0x14 //重复上报
* #define EV_FF 0x15
* #define EV_PWR 0x16
* #define EV_FF_STATUS 0x17
* #define EV_MAX 0x1f
*/
unsigned long keybit[NBITS(KEY_MAX)]; //位图,记录设备支持的按键类型
unsigned long relbit[NBITS(REL_MAX)]; //位图,记录设备支持的相对坐标
unsigned long absbit[NBITS(ABS_MAX)]; //位图,记录设备支持的绝对坐标
unsigned long mscbit[NBITS(MSC_MAX)]; //位图,记录设备支持的其他功能
unsigned long ledbit[NBITS(LED_MAX)]; //位图,记录设备支持的指示灯
unsigned long sndbit[NBITS(SND_MAX)]; //位图,记录设备支持的声音或警报
unsigned long ffbit[NBITS(FF_MAX)]; //位图,记录设备支持的作用力功能
unsigned long swbit[NBITS(SW_MAX)]; //位图,记录设备支持的开关功能
unsigned int keycodemax; //设备支持的最大按键值个数
unsigned int keycodesize; //每个按键的字节大小
void *keycode; //指向按键池,即指向按键值数组首地址
int (*setkeycode)(struct input_dev *dev, int scancode, int keycode); //修改按键值
int (*getkeycode)(struct input_dev *dev, int scancode, int *keycode); //获取按键值
struct ff_device *ff;
unsigned int repeat_key; //支持重复按键
struct timer_list timer; //设置当有连击时的延时定时器
int state;
int sync; //同步事件完成标识,为1说明事件同步完成
int abs[ABS_MAX + 1]; //记录坐标的值
int rep[REP_MAX + 1]; //记录重复按键的参数值
unsigned long key[NBITS(KEY_MAX)]; //位图,按键的状态
unsigned long led[NBITS(LED_MAX)]; //位图,led的状态
unsigned long snd[NBITS(SND_MAX)]; //位图,声音的状态
unsigned long sw[NBITS(SW_MAX)]; //位图,开关的状态
int absmax[ABS_MAX + 1]; //位图,记录坐标的最大值
int absmin[ABS_MAX + 1]; //位图,记录坐标的最小值
int absfuzz[ABS_MAX + 1]; //位图,记录坐标的分辨率
int absflat[ABS_MAX + 1]; //位图,记录坐标的基准值
int (*open)(struct input_dev *dev); //输入设备打开函数
void (*close)(struct input_dev *dev); //输入设备关闭函数
int (*flush)(struct input_dev *dev, struct file *file); //输入设备断开后刷新函数
int (*event)(struct input_dev *dev, unsigned int type, unsigned int code, int value); //事件处理
struct input_handle *grab;
struct mutex mutex; //用于open、close函数的连续访问互斥
unsigned int users;
struct class_device cdev; //输入设备的类信息
union { //设备结构体
struct device *parent;
} dev;
struct list_head h_list; //handle链表
struct list_head node; //input_dev链表
};
input_register_device
还记得之前提到过的:在Linux驱动中使用input子系统,一般的驱动使用输入子系统只需要使用以下的接口。
struct input_dev *input_allocate_device(void);
// 分配输入设备函数
int input_register_device(struct input_dev *dev);
// 注册输入设备函数
void input_unregister_device(struct input_dev *dev);
// 注销输入设备函数
void __set_bit();
// 事件支持(初始化),告诉input输入子系统支持哪些事件,哪些按键
void input_event(struct input_dev *dev, unsigned int type, unsigned int code, int value);
// 在发生输入事件时,向子系统报告事件。
void input_sync();
// 同步用于告诉input core子系统报告结束
其中,涉及到匹配的有关函数就是input_register_device。
/**
* input_register_device - register device with input core
* @dev: device to be registered
*
* This function registers device with input core. The device must be
* allocated with input_allocate_device() and all it's capabilities
* set up before registering.
* If function fails the device must be freed with input_free_device().
* Once device has been successfully registered it can be unregistered
* with input_unregister_device(); input_free_device() should not be
* called in this case.
*
* Note that this function is also used to register managed input devices
* (ones allocated with devm_input_allocate_device()). Such managed input
* devices need not be explicitly unregistered or freed, their tear down
* is controlled by the devres infrastructure. It is also worth noting
* that tear down of managed input devices is internally a 2-step process:
* registered managed input device is first unregistered, but stays in
* memory and can still handle input_event() calls (although events will
* not be delivered anywhere). The freeing of managed input device will
* happen later, when devres stack is unwound to the point where device
* allocation was made.
*/
int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(0);
struct input_devres *devres = NULL;
struct input_handler *handler;
unsigned int packet_size;
const char *path;
int error;
if (dev->devres_managed) {
devres = devres_alloc(devm_input_device_unregister,
sizeof(struct input_devres), GFP_KERNEL);
if (!devres)
return -ENOMEM;
devres->input = dev;
}
/* 默认所有的输入设备都支持EV_SYN同步事件 */
__set_bit(EV_SYN, dev->evbit);
/* 阻止 KEY_RESERVED 事件传递到用户空间 */
__clear_bit(KEY_RESERVED, dev->keybit);
/* 确保 没有用到的掩码 是空的 */
input_cleanse_bitmasks(dev);
packet_size = input_estimate_events_per_packet(dev);
if (dev->hint_events_per_packet < packet_size)
dev->hint_events_per_packet = packet_size;
dev->max_vals = max(dev->hint_events_per_packet, packet_size) + 2;
dev->vals = kcalloc(dev->max_vals, sizeof(*dev->vals), GFP_KERNEL);
if (!dev->vals) {
error = -ENOMEM;
goto err_devres_free;
}
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = 250;
dev->rep[REP_PERIOD] = 33;
}
/* 没有定义设备的getkeycode函数,则使用默认的获取键值函数 */
if (!dev->getkeycode)
dev->getkeycode = input_default_getkeycode;
/*没有定义设备的setkeycode函数,则使用默认的设定键值函数*/
if (!dev->setkeycode)
dev->setkeycode = input_default_setkeycode;
dev_set_name(&dev->dev, "input%ld",
(unsigned long) atomic_inc_return(&input_no) - 1);
/* 重点1:添加设备 */
error = device_add(&dev->dev);
if (error)
goto err_free_vals;
/* 获取并打印设备的绝对路径名称 */
path = kobject_get_path(&dev->dev.kobj, GFP_KERNEL);
pr_info("%s as %s\n",
dev->name ? dev->name : "Unspecified device",
path ? path : "N/A");
kfree(path);
error = mutex_lock_interruptible(&input_mutex);
if (error)
goto err_device_del;
/* 重点2: 把设备挂到全局的input子系统设备链表 input_dev_list 上 */
list_add_tail(&dev->node, &input_dev_list);
/* 重点3: nput设备在增加到input_dev_list链表上之后,会查找
* input_handler_list事件处理链表上的handler进行匹配,这里的匹配
* 方式与设备模型的device和driver匹配过程很相似,所有的input devicel
* 都挂在input_dev_list上,所有类型的事件都挂在input_handler_list
* 上,进行“匹配相亲”
*/
list_for_each_entry(handler, &input_handler_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
mutex_unlock(&input_mutex);
if (dev->devres_managed) {
dev_dbg(dev->dev.parent, "%s: registering %s with devres.\n",
__func__, dev_name(&dev->dev));
devres_add(dev->dev.parent, devres);
}
return 0;
err_device_del:
device_del(&dev->dev);
err_free_vals:
kfree(dev->vals);
dev->vals = NULL;
err_devres_free:
devres_free(devres);
return error;
}
EXPORT_SYMBOL(input_register_device);
上面的函数实现了:
- 添加设备
- 把输入设备挂到输入设备链表
input_dev_list中 - 遍历
input_handler_list链表,查找并匹配输入设备对应的事件处理层,如果匹配上了,就调用handler的connnect函数进行连接。
设备就是在此时注册的,下面分析handler就清晰了。 (input_attach_handler放到分析handler时再做讲解,更容易理解。)
事件层注册handler
事件层通过input_register_handler来完成注册。
不同的事件处理层主要是用来支持输入设备并与用户空间交互,这部分代码一般由供应商编写,不需要我们自己去编写。
因为Linux内核已经自带有一些事件处理器,可以支持大部分输入设备,比如Evdev.c、mousedev.c、joydev.c等。
对于Event handler:根据事件注册一个handler,将handler挂到链表input_handler_list下,然后遍历input_dev_list链表。查找并匹配输入设备对应的事件处理层,如果匹配上了,就调用connect函数进行连接,并创建input_handle结构。
Linux中默认的事件层不多;默认地,有evdev.c(事件设备),tsdev.c(触摸屏设备),joydev.c(joystick操作杆设备),keyboard.c(键盘设备),mousedev.c(鼠标设备) 这5个内核自带的设备处理函数注册(input_register_handler)到input子系统中。
$ cd drivers/input
$ grep -w -nR "input_register_handler"
misc/keychord.c:301: ret = input_register_handler(&kdev->input_handler);
keycombo.c:225: ret = input_register_handler(&state->input_handler);
apm-power.c:113: return input_register_handler(&apmpower_handler);
evbug.c:110: return input_register_handler(&evbug_handler);
evdev.c:1117: return input_register_handler(&evdev_handler);
joydev.c:947: return input_register_handler(&joydev_handler);
input.c:2155: * input_register_handler - register a new input handler
input.c:2162:int input_register_handler(struct input_handler *handler)
input.c:2183:EXPORT_SYMBOL(input_register_handler);
mousedev.c:1107: error = input_register_handler(&mousedev_handler);
下面,我们以evdev.c(事件驱动)为例子进行讲解。
evdev.c实现了对evdev的管理,根据Docuentation/input/input.txt的描述,evdev is the generic input event interface. It passes the events generated in the kernel straight to the program, with timestamps.
因此,evdev只是对输入设备这一类设备的管理,并不涉及具体如鼠标、键盘以及游戏摇杆等设备的管理,但是驱动中完全可以使用关于evdev的API直接给用户空间程序上报事件。
input_handler对象
// include/linux/input.h
struct input_handler {
void *private;
void (*event)(struct input_handle *handle, unsigned int type, unsigned int code, int value);
void (*events)(struct input_handle *handle,
const struct input_value *vals, unsigned int count);
bool (*filter)(struct input_handle *handle, unsigned int type, unsigned int code, int value);
bool (*match)(struct input_handler *handler, struct input_dev *dev);
int (*connect)(struct input_handler *handler, struct input_dev *dev, const struct input_device_id *id);
void (*disconnect)(struct input_handle *handle);
void (*start)(struct input_handle *handle);
bool legacy_minors;
int minor;
const char *name;
const struct input_device_id *id_table;
struct list_head h_list;
struct list_head node;
};
input_register_handler
事件处理层的处理器会调用input_register_handler来注册。
// drivers/input/evdev.c
static struct input_handler evdev_handler = {
.event = evdev_event,
.events = evdev_events,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.legacy_minors = true,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
static int __init evdev_init(void)
{
return input_register_handler(&evdev_handler);
}
static void __exit evdev_exit(void)
{
input_unregister_handler(&evdev_handler);
}
module_init(evdev_init);
module_exit(evdev_exit);
evdev_init直接调用input_register_handler 注册一个evdev_handler的input_handler对象。
/**
* input_register_handler - register a new input handler
* @handler: handler to be registered
*
* This function registers a new input handler (interface) for input
* devices in the system and attaches it to all input devices that
* are compatible with the handler.
*/
int input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
int error;
error = mutex_lock_interruptible(&input_mutex);
if (error)
return error;
INIT_LIST_HEAD(&handler->h_list);
/* 重点1 : 把设备处理器挂到全局的input子系统设备链表input_handler_list上 */
list_add_tail(&handler->node, &input_handler_list);
/* 重点2 : 遍历input_dev_list,试图与每一个input_dev进行匹配 */
list_for_each_entry(dev, &input_dev_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
mutex_unlock(&input_mutex);
return 0;
}
EXPORT_SYMBOL(input_register_handler);
这个注册过程和上面驱动层注册device(input_register_device)的过程非常相识。
注册过程中的匹配判断
你注意到了吗,无论是驱动层还是事件层,它们各自在向core注册的时候,都会调用到一个input_attach_handler。
我们看看input_attach_handler是如何匹配dev与handler的。
全局变量
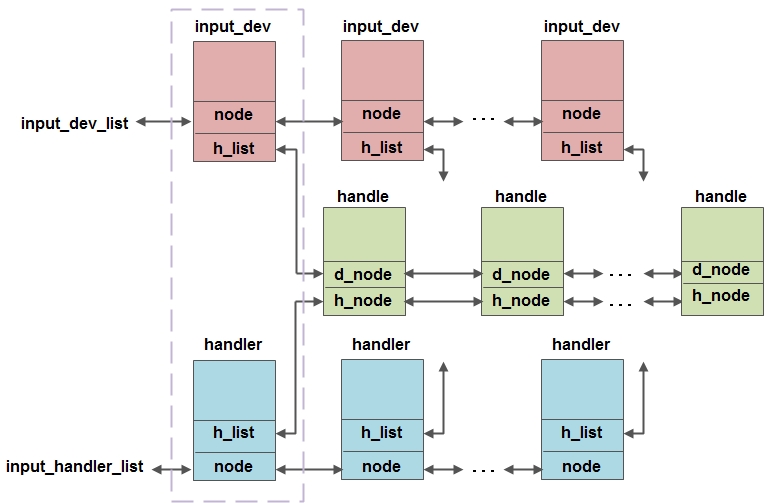
在device与handler注册的时候,都用到了下面的两个链表,其实这两个链表是用来俩俩匹配的。
static LIST_HEAD(input_dev_list);
static LIST_HEAD(input_handler_list);
对于handler和device,分别用链表input_handler_list和input_dev_list进行维护。当handler或者device增加或减少的时候,分别往这两链表增加或删除节点,这两条都是全局链表。
input_attach_handler
实际上就做2个事情,先match(匹配),再connect(连接)
static int input_attach_handler(struct input_dev *dev, struct input_handler *handler)
{
const struct input_device_id *id;
int error;
/* 利用handler->id_table和dev进行匹配 */
id = input_match_device(handler, dev);
if (!id)
return -ENODEV;
/*匹配成功,则调用handler->connect函数进行连接*/
error = handler->connect(handler, dev, id);
if (error && error != -ENODEV)
pr_err("failed to attach handler %s to device %s, error: %d\n",
handler->name, kobject_name(&dev->dev.kobj), error);
return error;
}
input_match_device
还记得吗,struct input_dev中也有一个struct input_id id。只是我们当时没有提到。 id用于匹配条件中,对于属性的要求。
设备和handler的匹配条件:只要handler的id中evbit、keybit等等中的某一位设置了,input设备也得具备这个条件。
简单来说,必须具有相同ID属性的devive和handler才能匹配在一起。
//kernel/include/linux/mod_devicetable.h
struct input_device_id {
kernel_ulong_t flags;
__u16 bustype;
// ...
__u16 version;
kernel_ulong_t evbit[INPUT_DEVICE_ID_EV_MAX / BITS_PER_LONG + 1];
kernel_ulong_t keybit[INPUT_DEVICE_ID_KEY_MAX / BITS_PER_LONG + 1];
// ...
kernel_ulong_t swbit[INPUT_DEVICE_ID_SW_MAX / BITS_PER_LONG + 1];
kernel_ulong_t driver_info;
}; // 与设备匹配的要求。
static const struct input_device_id *input_match_device(struct input_handler *handler,
struct input_dev *dev)
{
const struct input_device_id *id;
for (id = handler->id_table; id->flags || id->driver_info; id++) {
if (id->flags & INPUT_DEVICE_ID_MATCH_BUS)
if (id->bustype != dev->id.bustype)
continue;
// ...
if (id->flags & INPUT_DEVICE_ID_MATCH_VERSION)
if (id->version != dev->id.version)
continue;
if (!bitmap_subset(id->evbit, dev->evbit, EV_MAX))
continue;
if (!bitmap_subset(id->keybit, dev->keybit, KEY_MAX))
continue;
// ...
if (!handler->match || handler->match(handler, dev))
return id;
}
return NULL;
}
evdev_ids
由于 evdev.c 中的evdev_ids只有一个成员初始化,其他都为0(NULL):
// drivers/input/evdev.c
static const struct input_device_id evdev_ids[] = {
{ .driver_info = 1 }, /* Matches all devices */
{ }, /* Terminating zero entry */
};
因此,上面的if中,只有最后一个if满足条件,所以最后会以!handler->match而返回这个id。
这也就是为什么注释中说的,evdev.c 中的 handler 可以适用于任何的 devices(Matches all devices);因为evdev对device的要求很低。
handler->connect
对于evdev.c中的handler所对应的connect接口是evdev_connect。
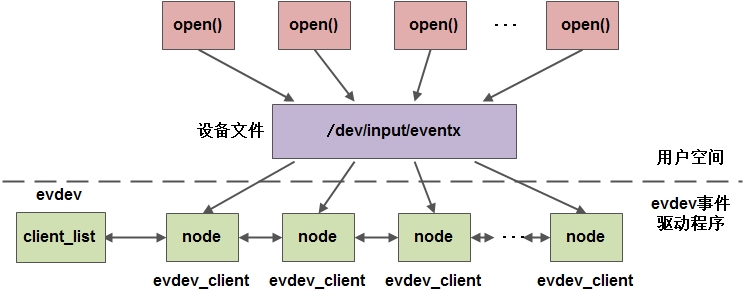
evdev_connect()主要是创建一个新的event设备,相应的设备节点文件是/dev/input/eventX。
1、要注册一个新的evdev设备,首先要获取一个次设备号(之前说过,主设备号是13),失败便不再往下执行。
成功以后,这个次设备号还会作为一个相对值dev_no,用于决定
/dev/input/eventX中的X的值。
2、一个evdev可以有多个client,所以初始化client_list。
3、而操作client的时候需要互斥,所以初始化client_lock,等待队列用于实现用户空间读取时的阻塞等待,exist成员置为true表示新的evdev已经存在,minor是新的evdev在evdev_table中的索引,而设备节点文件/dev/input/eventx中的x就是这里minor决定的。
4、另外一项重要工作就是用handle绑定一组匹配成功的input_dev和input_handler。
只要是input_dev和input_handler匹配了,handle中的handler成员指向了配对成功的handler:dev成员指向了配对成功的device,而private成员则指向了evdev设备本身。
struct input_handle {
void *private;
int open;
const char *name;
struct input_dev *dev; // 匹配成功的 一对 dev-handler中的 dev
struct input_handler *handler; // 匹配成功的 一对 dev-handler中的 handler
struct list_head d_node;
struct list_head h_node;
};
通过上文我们知道,链表input_handler_list和input_dev_list保存了handler与device,这两条链表都是全局链表。
那么input_hande 保存在哪里?实际上,而input_hande 没有一个全局的链表。它注册的时候将自己分别挂在了input_dev_list和 input_handler_list的h_list上了;
从此,建立好了三者的铁三角关系,通过input_handler_list和input_dev_list以及input_hande 中任何一方,都可以找到彼此。
最终:设备(/dev/input/eventX)被创建,我们最终就能够通过基于struct file_operations的open、read等方式在应用层获取数据。
evdev_connect
对于connect函数,每种事件处理器的实现都有差异,但原理都相同。
我们结合evdev.c中的connect看看是不是这样子的:
static struct input_handler evdev_handler = {
// ...
.connect = evdev_connect,
// ...
};
/*
* Create new evdev device. Note that input core serializes calls
* to connect and disconnect.
*/
static int evdev_connect(struct input_handler *handler, struct input_dev *dev,
const struct input_device_id *id)
{
struct evdev *evdev;
int minor;
int dev_no;
int error;
/* 申请一个新的次设备号 */
minor = input_get_new_minor(EVDEV_MINOR_BASE, EVDEV_MINORS, true);
evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL);
/* 初始化client_list列表和evdev_wait队列 */
INIT_LIST_HEAD(&evdev->client_list);
spin_lock_init(&evdev->client_lock);
mutex_init(&evdev->mutex);
init_waitqueue_head(&evdev->wait);
evdev->exist = true;
dev_no = minor;
/* Normalize device number if it falls into legacy range */
if (dev_no < EVDEV_MINOR_BASE + EVDEV_MINORS)
dev_no -= EVDEV_MINOR_BASE;
/*设置设备节点名称,eventX 就是在此时设置 */
dev_set_name(&evdev->dev, "event%d", dev_no);
/* 重点:初始化evdev结构体,其中handle为输入设备和事件处理的关联接口 */
evdev->handle.dev = input_get_device(dev);
evdev->handle.name = dev_name(&evdev->dev);
evdev->handle.handler = handler;
evdev->handle.private = evdev;
/*设置设备号,应用层就是通过设备号,找到该设备的*/
evdev->dev.devt = MKDEV(INPUT_MAJOR, minor);
evdev->dev.class = &input_class;
evdev->dev.parent = &dev->dev;
evdev->dev.release = evdev_free;
device_initialize(&evdev->dev);
/* input_dev设备驱动和handler事件处理层的关联,就在这时由handle完成 */
error = input_register_handle(&evdev->handle);
cdev_init(&evdev->cdev, &evdev_fops);
evdev->cdev.kobj.parent = &evdev->dev.kobj;
error = cdev_add(&evdev->cdev, evdev->dev.devt, 1);
/* 将设备加入到Linux设备模型,它的内部将找到它的bus,然后让它的bus
给它找到它的driver,在驱动或者总线的probe函数中,一般会在/dev/目录
先创建相应的设备节点,这样应用程序就可以通过该设备节点来使用设备了,
/dev/eventX 设备节点就是在此时生成
*/
error = device_add(&evdev->dev);
return 0;
}
事件层fops代码解析
fops接口在输入子系统中由事件处理层完成。
当应用程序执行open("/dev/input/eventX", O_RDWR)时等调用的时候,系统调用经过文件系统一系列操作后就会执行file_operations中的成员函数。
这些函数会从事件处理层到input core层再到驱动程序的input_dev对应的方法(例如open)依次执行下去。
以evdev.c为例:
static const struct file_operations evdev_fops = {
.owner = THIS_MODULE,
.read = evdev_read,
.write = evdev_write,
.poll = evdev_poll,
.open = evdev_open,
.release = evdev_release,
.unlocked_ioctl = evdev_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = evdev_ioctl_compat,
#endif
.fasync = evdev_fasync,
.flush = evdev_flush,
.llseek = no_llseek,
};
这些file_operations对于子系统都比较重要。
evdev_open
evdev_open函数代表注册一个client,此后准备接收数据。
static int evdev_open(struct inode *inode, struct file *file)
{
// 首先,是找到 evdev设备
struct evdev *evdev = container_of(inode->i_cdev, struct evdev, cdev);
unsigned int bufsize = evdev_compute_buffer_size(evdev->handle.dev);
unsigned int size = sizeof(struct evdev_client) +
bufsize * sizeof(struct input_event);
struct evdev_client *client;
int error;
// 第二,给evdev_client结构分配内存空间。
client = kzalloc(size, GFP_KERNEL | __GFP_NOWARN);
if (!client)
client = vzalloc(size);
client->clkid = CLOCK_MONOTONIC;
client->bufsize = bufsize;
spin_lock_init(&client->buffer_lock);
snprintf(client->name, sizeof(client->name), "%s-%d",
dev_name(&evdev->dev), task_tgid_vnr(current));
// 第三,将client的evdev指向当前evdev,并且将client挂接到evdev的链表上
client->evdev = evdev;
evdev_attach_client(evdev, client);
// 第四,调用evdev_open_device()
error = evdev_open_device(evdev);
file->private_data = client;
// 第五,设置文件的模式
nonseekable_open(inode, file);
return 0;
}
找到edev
第一件事,是找到 evdev设备,获取的方式很kernel:
struct evdev *evdev = container_of(inode->i_cdev, struct evdev, cdev);
还记得吗,前面evdev_connect中申请了一个evdev对象。并通过cdev_add(&evdev->cdev, evdev->dev.devt, 1);加入到了字符设备中。
因此,在这里能够通过container_of将其取出。取出以后是为了继续操作。
evdev的原型是这样子的:
struct evdev {
int open; // open,当用户open此设备时,open的值加1。
struct input_handle handle; // 包括了匹配的 dev 与 handler
wait_queue_head_t wait; // 等待队列
struct evdev_client __rcu *grab; // 可以为evdev实例指定一个struct evdev_client实例,这样在传递Input消息时就只会传递给这一个struct evdev_client实例,而不会传递给所有的struct evdev_client实例。每open一次就会生成一个struct evdev_client实例。
struct list_head client_list; // 用来把所有的struct client_list实例连接在一起
spinlock_t client_lock; /* protects client_list */
struct mutex mutex; // 同步相关的锁
struct device dev; // dev,用来嵌入到设备模型中。
struct cdev cdev; //
bool exist; // struct evdev被成功实例化后,exist的值就为true
};
新建evdev_client对象
client = kzalloc(size, GFP_KERNEL | __GFP_NOWARN);
if (!client)
client = vzalloc(size);
client->clkid = CLOCK_MONOTONIC;
client->bufsize = bufsize;
spin_lock_init(&client->buffer_lock);
snprintf(client->name, sizeof(client->name), "%s-%d",
dev_name(&evdev->dev), task_tgid_vnr(current));
evdev_client原型
这里非常有必要说一下evdev_client结构,此结构定义如下:
struct evdev_client {
unsigned int head;
unsigned int tail;
unsigned int packet_head; /* [future] position of the first element of next packet */
spinlock_t buffer_lock; /* protects access to buffer, head and tail */
struct wake_lock wake_lock;
bool use_wake_lock;
char name[28];
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
int clkid;
unsigned int bufsize;
struct input_event buffer[];
};
可以看到这个结构中多数成员都是关于buffer的。
这完全可以理解,一个输入设备要上报输入事件,从代码上来说,肯定有存储事件的缓冲区,而且有时候一个设备会上报多个事件,那么我们需要能够存储多个事件的缓冲区。
bufsize
unsigned int bufsize = evdev_compute_buffer_size(evdev->handle.dev);
unsigned int size = sizeof(struct evdev_client) +
bufsize * sizeof(struct input_event);
// ---------------------
static unsigned int evdev_compute_buffer_size(struct input_dev *dev)
{
unsigned int n_events =
max(dev->hint_events_per_packet * EVDEV_BUF_PACKETS,
EVDEV_MIN_BUFFER_SIZE);
return roundup_pow_of_two(n_events);
}
bufsize成员:表示当前输入设备的输入事件缓冲区最多可以存放事件的个数。
值得注意的是,输入事件缓冲区的大小不是静态的,这里采用的是基于柔型数组进行动态申请;
在计算bufsize的时候,进行向上对齐2的幂。这样子在判断的时候可以做一个小的优化,例如:
client->head &= client->bufsize - 1; // 相当于 取模%,但比%快。
将client挂接到evdev的链表上
第三步,将client的evdev指向当前evdev,并且将client挂接到evdev的链表上。
client->evdev = evdev;
evdev_attach_client(evdev, client);
-----------------------------
static void evdev_attach_client(struct evdev *evdev,
struct evdev_client *client)
{
spin_lock(&evdev->client_lock);
list_add_tail_rcu(&client->node, &evdev->client_list);
spin_unlock(&evdev->client_lock);
}
既然这里有挂接链表的操作,说明一个evdev可以对应着多个client,这一点在evdev_disconnect()中已经体现:evdev需要遍历自己的client_list,给所有的client发信号。
static void evdev_disconnect(struct input_handle *handle)
{
struct evdev *evdev = handle->private;
device_del(&evdev->dev);
evdev_cleanup(evdev);
input_free_minor(MINOR(evdev->dev.devt));
input_unregister_handle(handle);
put_device(&evdev->dev);
}
void input_unregister_handle(struct input_handle *handle)
{
struct input_dev *dev = handle->dev;
list_del_rcu(&handle->h_node);
/*
* Take dev->mutex to prevent race with input_release_device().
*/
mutex_lock(&dev->mutex);
list_del_rcu(&handle->d_node);
mutex_unlock(&dev->mutex);
synchronize_rcu();
}
一张简单的描述evdev是怎么把client连接起来的图:
调用evdev_open_device()
第四步,调用evdev_open_device(),并且将file的private_data初始化为client。
error = evdev_open_device(evdev);
file->private_data = client;
evdev_open_device()代码如下:
static int evdev_open_device(struct evdev *evdev)
{
int retval;
retval = mutex_lock_interruptible(&evdev->mutex);
if (!evdev->exist)
retval = -ENODEV;
else if (!evdev->open++) {
retval = input_open_device(&evdev->handle);
if (retval)
evdev->open--;
}
mutex_unlock(&evdev->mutex);
return retval;
}
此函数比较简单,上锁、检查参数后调用input_open_device(),代码如下:
int input_open_device(struct input_handle *handle)
{
struct input_dev *dev = handle->dev; // 找到 对应的dev,还记得吗,3者可以互相找到对方
int retval;
retval = mutex_lock_interruptible(&dev->mutex);
if (dev->going_away) {
retval = -ENODEV;
goto out;
}
handle->open++;
if (!dev->users++ && dev->open)
retval = dev->open(dev);
if (retval) {
dev->users--;
if (!--handle->open) {
/*
* Make sure we are not delivering any more events
* through this handle
*/
synchronize_rcu();
}
}
out:
mutex_unlock(&dev->mutex);
return retval;
}
input_open_device()的核心是对handle->open和dev->users成员自增,调用dev->open()。
将handle的open计数加1,表示此handle已经打开。
但是我没搞懂这里的逻辑,为什么只有dev->users为零的时候才会调用dev->open()?还有,dev->open是在哪里操作的?dev->open就是我们使用input_register_device()之前自己赋值操作的方法。
到这里就分析完了evdev_open(),evdev_poll()就是调用poll_wait(),evdev_fasync()就是调用fasync_helper(),这里不多说了,这两个函数就说明我们可以在应用层使用poll()或者select()实现输入设备的异步阻塞IO以及异步非阻塞IO操作。
设置文件的模式
nonseekable_open函数不说了,就是设置文件的模式。
nonseekable_open(inode, file);
//-------------------
int nonseekable_open(struct inode *inode, struct file *filp)
{
filp->f_mode &= ~(FMODE_LSEEK | FMODE_PREAD | FMODE_PWRITE);
return 0;
}
evdev_read
首先思考个问题,在应用层调用read函数,是如何读取到实际硬件的按键值的?
接下来分析evdev_read(),它的作用是从已经打开的evdev中读取输入事件,如果缓冲区中有事件则传递给用户空间,否则阻塞等待:
1、从file->private_data中获取evdev_client结构,接着根据client获取当前的evdev设备。
2、判断读取长度是否合法。如果用户空间要读取的长度小于一个事件的长度,那么直接返回;如果当前事件缓冲区为空,并且设备存在,同时当前文件的操作为非阻塞IO方式,那么直接返回-EAGAIN即可。
3、将数据拷贝给应用空间。我们在下面再介绍这个。
4、判断当前是否读到了数据,退出或者等待。
- 等待:调用
wait_event_interruptible(),条件为:“输入事件缓冲区非空 或 evdev设备不存在了”,如果是因为设备不存在了,那么直接返回-ENODEV即可,否则读取缓冲区中的事件,传递给用户空间即可。 - 停止:如果已经传递给用户空间的数据长度已经不小于count或者输入事件缓冲区已经空了,就退出。
static ssize_t evdev_read(struct file *file, char __user *buffer,
size_t count, loff_t *ppos)
{
// 1、获取对应的实例,准备操作。
struct evdev_client *client = file->private_data;
struct evdev *evdev = client->evdev;
struct input_event event;
size_t read = 0;
int error;
// 2、判断读取长度是否合法
if (count != 0 && count < input_event_size())
return -EINVAL;
for (;;) {
// 设备不存在
if (!evdev->exist || client->revoked)
return -ENODEV;
// 不允许非阻塞读取
if (client->packet_head == client->tail &&
(file->f_flags & O_NONBLOCK))
return -EAGAIN;
/*
* count == 0 is special - no IO is done but we check
* for error conditions (see above).
*/
if (count == 0)
break;
// 3、将数据拷贝给应用空间。
while (read + input_event_size() <= count &&
evdev_fetch_next_event(client, &event)) {
// 相当于 copy_to_user(),把取出来的事件拷贝给用户空间。
if (input_event_to_user(buffer + read, &event))
return -EFAULT;
read += input_event_size();
}
// 4、判断当前是否读到了数据,读到数据则结束,不能读则等待。
if (read)
break;
if (!(file->f_flags & O_NONBLOCK)) {
error = wait_event_interruptible(evdev->wait,
client->packet_head != client->tail ||
!evdev->exist || client->revoked);
if (error)
return error;
}
}
return read;
}
evdev_fetch_next_event
此函数就是从输入事件缓冲区中取出一个事件。
static int evdev_fetch_next_event(struct evdev_client *client,
struct input_event *event)
{
int have_event;
// 1、加锁
spin_lock_irq(&client->buffer_lock);
// 2、取出事件
have_event = client->packet_head != client->tail;
if (have_event) {
*event = client->buffer[client->tail++];
client->tail &= client->bufsize - 1;
if (client->use_wake_lock &&
client->packet_head == client->tail)
wake_unlock(&client->wake_lock);
}
spin_unlock_irq(&client->buffer_lock);
return have_event;
}
1、对client加锁
2、根据client->head与client->tail判断缓冲区是否有事件,若两者不相等那么有,否则没有。
3、取出事件。由于tail指向将要处理的事件,若要取事件,那么就根据tail就可以得到之。
evdev_event
evdev_read()是读取事件,我们知道read的时候是不能 非阻塞读取的,如果读取时没有数据呢,那么是在哪里来唤醒?换句话说,如果读取操作阻塞在了wait队列上,那么我们在哪里将其唤醒呢?
读取时使用
wait_event_interruptible()实现阻塞IO。
答案在本节揭晓。
当产生了一个输入事件以后,evdev_event会被调用。
谁在调用wake_up_interruptible?
搜索这个evdev->wait这个等待队列变量,找到evdev_event函数里唤醒:
static void evdev_event(struct input_handle *handle,
unsigned int type, unsigned int code, int value)
{
struct input_value vals[] = { { type, code, value } };
evdev_events(handle, vals, 1);
---> evdev_pass_values(client, vals, count, ev_time);
---> wake_up_interruptible(&evdev->wait);
}
其中evdev_event()是evdev.c(事件处理层) 的evdev_handler->event成员,,
static struct input_handler evdev_handler = {
.event = evdev_event,
.events = evdev_events,
// ...
};
调用关系统计
那么是谁调用了evdev_event()(即evdev_handler->event())?
答案:设备中使用input_event进行了事件上报。
input.c中试搜下handler->event 或 handler.event下函数调用:
/*
input_event;
-->input_handle_event;
---->input_pass_values
------>input_to_handler
-------->handler->events(handle, vals, count);
*/
void input_event(struct input_dev *dev,
unsigned int type, unsigned int code, int value)
{
unsigned long flags;
if (is_event_supported(type, dev->evbit, EV_MAX)) {
spin_lock_irqsave(&dev->event_lock, flags);
// 这里
input_handle_event(dev, type, code, value);
spin_unlock_irqrestore(&dev->event_lock, flags);
}
}
static void input_handle_event(struct input_dev *dev,
unsigned int type, unsigned int code, int value)
{
int disposition;
disposition = input_get_disposition(dev, type, code, value);
if ((disposition & INPUT_PASS_TO_DEVICE) && dev->event)
dev->event(dev, type, code, value);
if (!dev->vals)
return;
if (disposition & INPUT_PASS_TO_HANDLERS) {
struct input_value *v;
if (disposition & INPUT_SLOT) {
v = &dev->vals[dev->num_vals++];
v->type = EV_ABS;
v->code = ABS_MT_SLOT;
v->value = dev->mt->slot;
}
v = &dev->vals[dev->num_vals++];
v->type = type;
v->code = code;
v->value = value;
}
if (disposition & INPUT_FLUSH) {
if (dev->num_vals >= 2)
// 这里
input_pass_values(dev, dev->vals, dev->num_vals);
dev->num_vals = 0;
} else if (dev->num_vals >= dev->max_vals - 2) {
dev->vals[dev->num_vals++] = input_value_sync;
// 这里
input_pass_values(dev, dev->vals, dev->num_vals);
dev->num_vals = 0;
}
}
static void input_pass_values(struct input_dev *dev,
struct input_value *vals, unsigned int count)
{
struct input_handle *handle;
struct input_value *v;
if (!count)
return;
rcu_read_lock();
handle = rcu_dereference(dev->grab);
if (handle) {
count = input_to_handler(handle, vals, count);
} else {
// 遍历client_list链表,每找到一个client就调用evdev_pass_event函数
list_for_each_entry_rcu(handle, &dev->h_list, d_node)
if (handle->open)
// 这里,注意,这里开始准备使用handle找到对应的handler。
count = input_to_handler(handle, vals, count);
}
rcu_read_unlock();
add_input_randomness(vals->type, vals->code, vals->value);
/* trigger auto repeat for key events */
for (v = vals; v != vals + count; v++) {
if (v->type == EV_KEY && v->value != 2) {
if (v->value)
input_start_autorepeat(dev, v->code);
else
input_stop_autorepeat(dev);
}
}
}
static unsigned int input_to_handler(struct input_handle *handle,
struct input_value *vals, unsigned int count)
{
struct input_handler *handler = handle->handler;
struct input_value *end = vals;
struct input_value *v;
for (v = vals; v != vals + count; v++) {
if (handler->filter &&
handler->filter(handle, v->type, v->code, v->value))
continue;
if (end != v)
*end = *v;
end++;
}
count = end - vals;
if (!count)
return 0;
if (handler->events)
// 这里
handler->events(handle, vals, count);
else if (handler->event)
for (v = vals; v != end; v++)
// 这里
handler->event(handle, v->type, v->code, v->value);
return count;
}
显然,就是input_dev通过输入核心为驱动层提供统一的接口input_event,来向事件处理层上报数据并唤醒。
分析
现在我们已经知道了通讯的流程,具体看看整个流程都做了什么事情。
传递事件
// linux/input.h
struct input_value {
__u16 type;
__u16 code;
__s32 value;
};
/*
* Pass incoming events to all connected clients.
*/
static void evdev_events(struct input_handle *handle,
const struct input_value *vals, unsigned int count)
{
struct evdev *evdev = handle->private;
struct evdev_client *client;
ktime_t time_mono, time_real;
time_mono = ktime_get();
time_real = ktime_sub(time_mono, ktime_get_monotonic_offset());
rcu_read_lock();
// evdev的grab成员,这个成员代表exclusice access的含义
client = rcu_dereference(evdev->grab);
if (client) // 如果grab不是NULL,那么这个evdev只能被一个client访问使用
evdev_pass_values(client, vals, count, time_mono, time_real);
else // 如果没有grab成员,那么此事件就需要给evdev->client_list上所有成员发消息,发消息的函数是evdev_pass_event(),
{
list_for_each_entry_rcu(client, &evdev->client_list, node)
evdev_pass_values(client, vals, count,
time_mono, time_real);
}
rcu_read_unlock();
}
static void evdev_event(struct input_handle *handle,
unsigned int type, unsigned int code, int value)
{
struct input_value vals[] = { { type, code, value } };
evdev_events(handle, vals, 1);
}
在新的版本中,evdev_event是对evdev_events的简单封装。
evdev_events的作用:把type、code以及value封装进input_value类型的vals中(相当于封装了一个代表的事件),每一个发送给当前evdev对应的client。
准备删除。最后,如果type是EV_SYN且code是SYN_REPORT,那么我们将调用wake_up_interruptible(),实现读取操作的同步,这也意味着,驱动程序中要显式调用report相关的函数才能解锁读取操作。
保存事件
这里重点看evdev_pass_values
// include/uapi/linux/input.h
struct input_event {
struct timeval time;
__u16 type;
__u16 code;
__s32 value;
};
static void evdev_pass_values(struct evdev_client *client,
const struct input_value *vals, unsigned int count,
ktime_t *ev_time)
{
struct evdev *evdev = client->evdev;
const struct input_value *v; // 迭代器
struct input_event event;
bool wakeup = false;
if (client->revoked)
return;
event.time = ktime_to_timeval(ev_time[client->clk_type]);
/* Interrupts are disabled, just acquire the lock. */
spin_lock(&client->buffer_lock);
// 对每一个事件进行处理,并发送到cline
for (v = vals; v != vals + count; v++) {
if (__evdev_is_filtered(client, v->type, v->code))
continue;
if (v->type == EV_SYN && v->code == SYN_REPORT) {
/* drop empty SYN_REPORT */
if (client->packet_head == client->head)
continue;
wakeup = true;
}
event.type = v->type;
event.code = v->code;
event.value = v->value;
// 保存事件
__pass_event(client, &event);
}
spin_unlock(&client->buffer_lock);
// 唤醒
if (wakeup)
wake_up_interruptible(&evdev->wait);
}
保存
struct evdev_client {
unsigned int head;
unsigned int tail;
unsigned int packet_head; /* [future] position of the first element of next packet */
spinlock_t buffer_lock; /* protects access to buffer, head and tail */
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
unsigned int clk_type;
bool revoked;
unsigned long *evmasks[EV_CNT];
unsigned int bufsize;
struct input_event buffer[];
};
static void __pass_event(struct evdev_client *client,
const struct input_event *event)
{
// 1、保存事件
client->buffer[client->head++] = *event;
client->head &= client->bufsize - 1;
// 2、 如果缓冲区满了
if (unlikely(client->head == client->tail)) {
/*
* This effectively "drops" all unconsumed events, leaving
* EV_SYN/SYN_DROPPED plus the newest event in the queue.
*/
client->tail = (client->head - 2) & (client->bufsize - 1);
client->buffer[client->tail].time = event->time;
client->buffer[client->tail].type = EV_SYN;
client->buffer[client->tail].code = SYN_DROPPED;
client->buffer[client->tail].value = 0;
client->packet_head = client->tail;
}
// 3、异步通知。
if (event->type == EV_SYN && event->code == SYN_REPORT) {
client->packet_head = client->head;
kill_fasync(&client->fasync, SIGIO, POLL_IN);
}
}
1、既然每次产生一个输入事件,那么这个函数肯定要将产生的事件存储到事件队列环形缓冲区中。
上面代码对于client->head的操作为:存储了事件队列以后,还要确保head没超过bufsize。如果超过了bufsize,那么应该从零开始。
由于在
evdev_open中,申请buffsize时对2的幂向上取整,因此只需要进行位与就可以完成相当于%的操作(小优化)。
2、如果存储了当前事件后,事件队列缓冲区满了怎么办?内核只留下两个事件:
- 最新的一个事件其实不是事件,它的code为SYN_DROPPED;
- 而另一个就是newest事件,接着把packet_head成员更新为tail,代表一系列事件的头部。
3、如果我们的事件type=EV_SYN,code=SYN_REPORT,那么通过kill_fasync()发送SIGIO。因此,如果我们的输入设备文件支持异步IO操作的话,应用层应该能通过异步通知的方式接收SIGIO,从而在信号回调函数中读取到输入事件。
通常,用
input_sync来完成对输入事件的上报。
若在页首无特别声明,本篇文章由 Schips 经过整理后发布。
博客地址:https://www.cnblogs.com/schips/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号