

我们接着学习LFM波形的相关知识,本篇文章可能有点多,请大家静下心来慢慢看看。
2.5、线性三角FMCW
信号处理的初始阶段与锯齿波相同波形。与锯齿波形的情况类似(见图2.10)差拍信号如下所示(具体可参考锯锯齿波的推导):

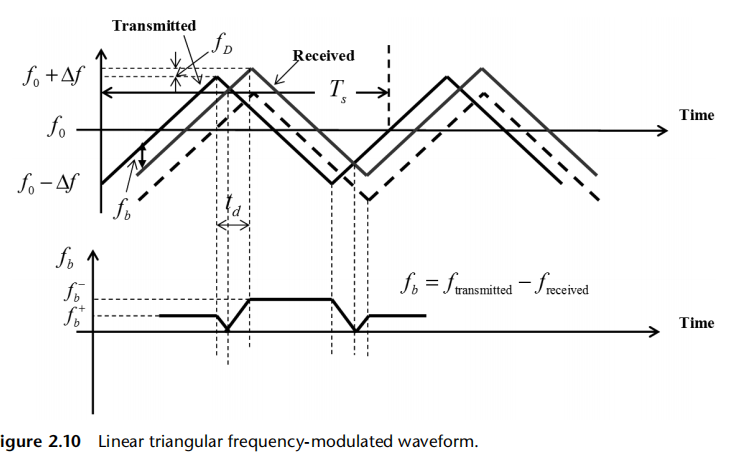
我们回过头来再看看在锯齿波中目标的距离和多普勒是怎么定义的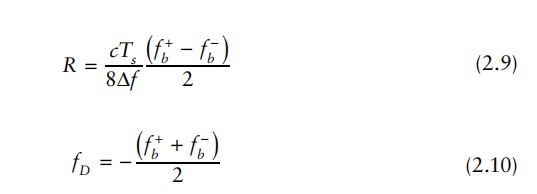
在三角波中也有与之相似的目标的距离和多普勒定义,正是这种相似性,导致三角波在测试多个目标时,会出现一些问题。至于这些问题我们后面再说。现在像锯齿波一样我们先讨论单个目标时三角波的情况。
2.5.1一个目标
当我们对正斜率执行FFT时,我们得到fb+,而不是我们得到的斜率fb−. 如图2.11所示。在这种情况下,R和fD为由(2.9)和(2.10)定义。然而,对于两个目标,这是另一回事。
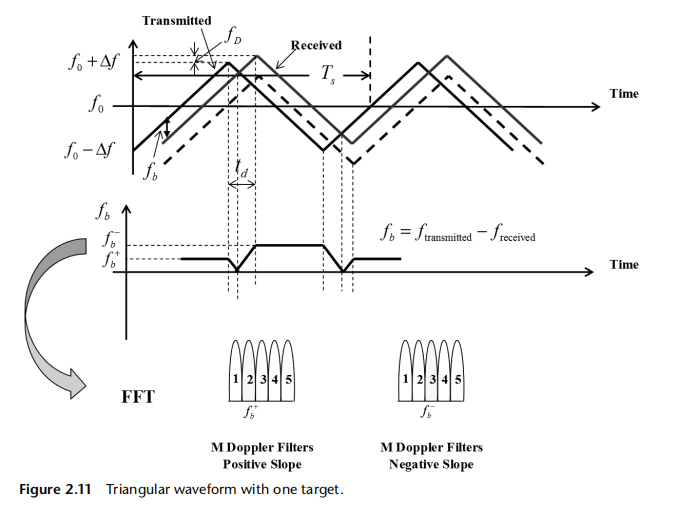
2.5.2两个目标
在这种情况下,如图2.12所示,当我们对正斜率和负斜率中的每一个都执行FFT时,我们在每个多普勒窗口中获得两个拍,并且我们无法关联哪个拍与哪个目标。通过添加未调制段来解决这个问题。
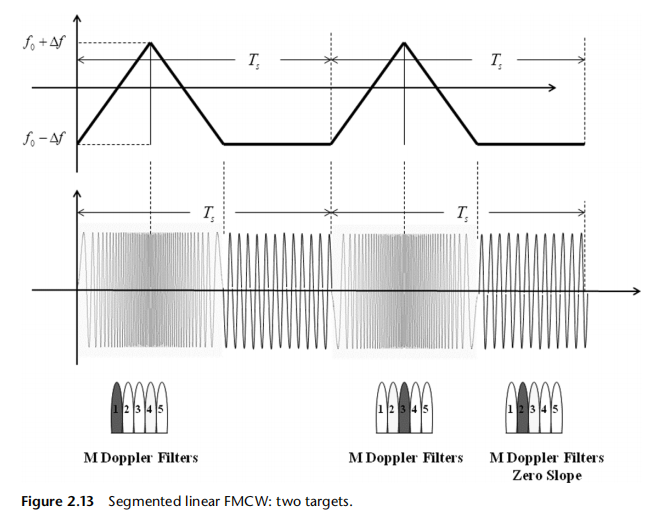
2.6分段线性FMCW
在图2.13中,正斜率产生两个回波。同样,负斜率产生两个回波。然而,为了解决模糊性,我们使用具有零斜率的未调制部分。这产生了每个目标的精确多普勒。
已知多普勒值,我们将fb+和fb-代入(2.10),直到满足该方程。这意味着关联是正确的。我们现在可以使用(2.9)来计算距离。另一种可以解决距离和多普勒模糊的解决方案是使用多个调制斜率(Δf和Ts)。我们现在计算FMCW雷达的两个主要参数:扫频带宽和目标距离。
2.7扫描带宽的推导
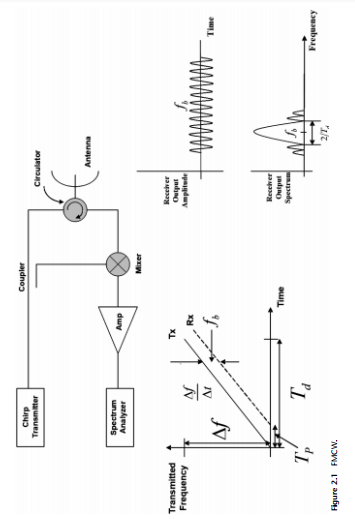
载波频率随时间线性增加。斜坡斜率由Δf/Δt给出。在往返时间Tr=2R/c之后接收回波,其中R是到目标的距离。
回波与发射信号的一部分混频(零差混频)以产生输出拍频fb。

从图2.1中可以看出,输出将是一个恒定频率,但在周转时间扫描的极端情况除外。
如果所需的距离分辨率为ΔR,则所需的频率分辨率为Δfb。

对于Δfb的光谱分辨率,必须至少观察信号Td的停留时间=1/Δfb。

在Δf/Δt的斜坡速率下,总扫描频率Δf是扫描速率和停留时间的乘积:

方程(2.27)意味着所需要的距离分辨率越高,所需的信号带宽就越宽。这一推论与脉冲雷达的推论相同。
2.8距离计算
通常,使用以下关系从测量的拍频计算距离

注意,Td是到目标的传播时间(范围),也是期望光谱分辨率的最小停留时间[参见(2.26)]。扫描时间Ts是FMCW波形的总扫描时间,远大于Td。其原因将在第2.16节稍后讨论。
2.9匹配过滤器
匹配滤波器是一种滤波器,其脉冲响应由特殊信号,从而在滤波器处产生最大可达到的SNR当信号和白噪声都通过时输出。这样的滤波器是广泛应用于雷达。
考虑具有加性高斯白噪声的信号s(t)光谱密度N0/2,其通过频率为传递函数H(ω)。我们面临的问题如下:
在给定的观测时间tM,在输出端产生最高SNR的滤波器响应是什么?
因此,我们需要搜索这样一个传递函数H(ω),它将为我们完成这项工作,并使SNR最大化:

如果s(t)的傅里叶变换是s(ω),则tM处的输出信号由下式给出

噪声与t无关,其均方值为:

将(2.30)和(2.31)代入(2.29),我们得到

我们现在使用Schwartz不等式,它表示对于任意两个复信号A(ω)和B(ω),以下不等式成立:

等式成立iff

其中*表示复共轭,K是任意常数。将Schwartz不等式应用于(2.32),我们得到:

其中E是信号的能量。这意味着最大SNR在以下情况下成立:

方程(2.35)表明2E/N0是可达到的最高峰值SNR。H(ω)的傅里叶逆变换将产生所需滤波器的脉冲响应

对(2.37)告诉我们H(ω)=K⎪S(ω)],这意味着滤波器根据信号的频谱来衡量其频率响应。脉冲响应表明它是信号共轭的延迟镜像。
对于匹配滤波器,当t<0时,h(t)必须为零。只有当tM等于或大于信号s(t)的持续时间时,才会发生这种情况:

如果我们现在将t=tM:

这表示在tM处,输出信号与输入信号的能量成比例。这适用于通过其匹配滤波器的所有信号。
因此,总结,在存在白噪声的情况下,匹配滤波器的输出SNR是可达到的最高SNR:2E/N0。该输出SNR是信号能量E的函数,而不是信号形式的函数。当噪声为非白色或其他考虑因素(如分辨率、精度和检测)很重要时,信号形式将很重要。
实例
线性滤波器输出端的最大瞬时SNR是多少?脉冲响应与信号s(t)=exp(−t2/2T)匹配?
解决方案
信号能量为:

因此,最大瞬时SNR为:
其中N0/2是输入噪声功率谱密度
2.10存储副本
可以根据雷达之间的互相关来计算匹配的滤波器输出接收信号和发送波形的延迟副本。数学上这与(2.37)中给出的表达式所定义的相同。如果输入信号与传输信号相同,匹配滤波器的输出将是接收(或发送)信号的自相关函数。这是实现此类过滤器的一种非常流行的方法,在实践中
传输的波形通常被计算并存储在存储器中以供使用当需要时由雷达信号处理器执行。
2.11时宽带宽积
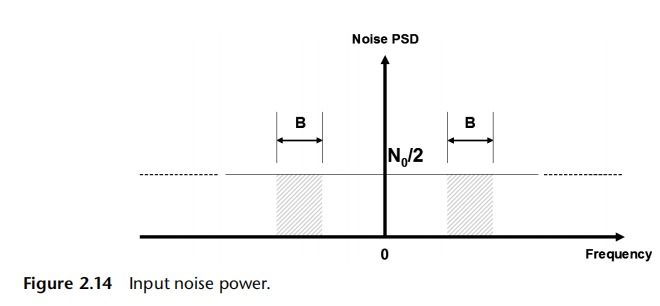
我们现在检查匹配滤波雷达接收机。如前所述,滤波器具有具有双边频谱的白噪声带宽。该噪声功率由下式给出

其中B是匹配的滤波器带宽,系数2用于说明负和正频带,如图2.14所示。信号持续时间T上的平均输入信号功率为:

其中E是信号能量。因此,匹配滤波器输入SNR由下式给出:

输出峰值瞬时SNR与输入SNR之比为

量BT被称为给定波形或其对应匹配滤波器的时间带宽乘积。输出SNR比输入SNR增加的因子BT称为匹配滤波器增益或压缩增益。
未调制信号的时间带宽乘积接近1。通过使用频率或相位调制,我们可以将信号的时间带宽乘积增加到大于1的值。如果雷达接收机匹配滤波器与输入波形完全匹配,则压缩增益等于BT。如果匹配的滤波器频谱与输入信号的频谱相偏离,那么压缩增益成比例下降。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号