
1、什么是功率孔径积
功率孔径积是指发射的平均功率(Pav)与天线的有效孔径(A)的乘积(注意是有效孔径),一般表示为PavA。
2、功率孔径积的影响
波束宽度会受到天线有效孔径的影响,我记得是当有效孔径越大,波束宽度就越窄。大概是下面公式的一个关系,记不太清了,后面找到笔记了再来补充。
其中 代表波束宽度,k是一个常数系数,
代表波束宽度,k是一个常数系数, 是波长,D是天线有效孔径。
是波长,D是天线有效孔径。
可以看出提高有效孔径可以使得波束宽度变窄,越窄的波束宽度,对应的角度分辨率越高。如果是阵列测角,一般
角度分辨率=波束宽度/阵元数
因此用类比功率孔径积可知,
1、功率不变,当功率孔径积增大,相当于有效孔径增大,其对应的波束宽度会变小,其角度分辨率会变大。
2、有效孔径不变,当功率孔径积增大,相当于功率增大(个人觉得相当于有效孔径变大了,因为功率增大了相当于天线的利用率增大了,比如一开始的有效孔径为真实孔径的50%,这时候发射的功率为P1,提高了发射功率,那么就相当于提高了有效孔径(加入提高为真实孔径的60%),不知道这样理解对不对,希望大家一起来讨论一下),其角度分辨率也会变大。
3、示例
下面这个例子并不是功率孔径积跟角度分辨率的例子,但我个人觉得还是写一下,方便以后查看和学习。
假设某搜索雷达的主要参数为:扫描时间Tsc=2s,搜索区域为7.4sr(球面弧度),噪声系数NF=8dB,损耗为6dB,要求距离为75km处的信噪比SNR=20dB,计算针对不同RCS的目标要求的雷达的功率孔径积。至于搜索雷达的公式就不在这推了,直接给出搜索公式:
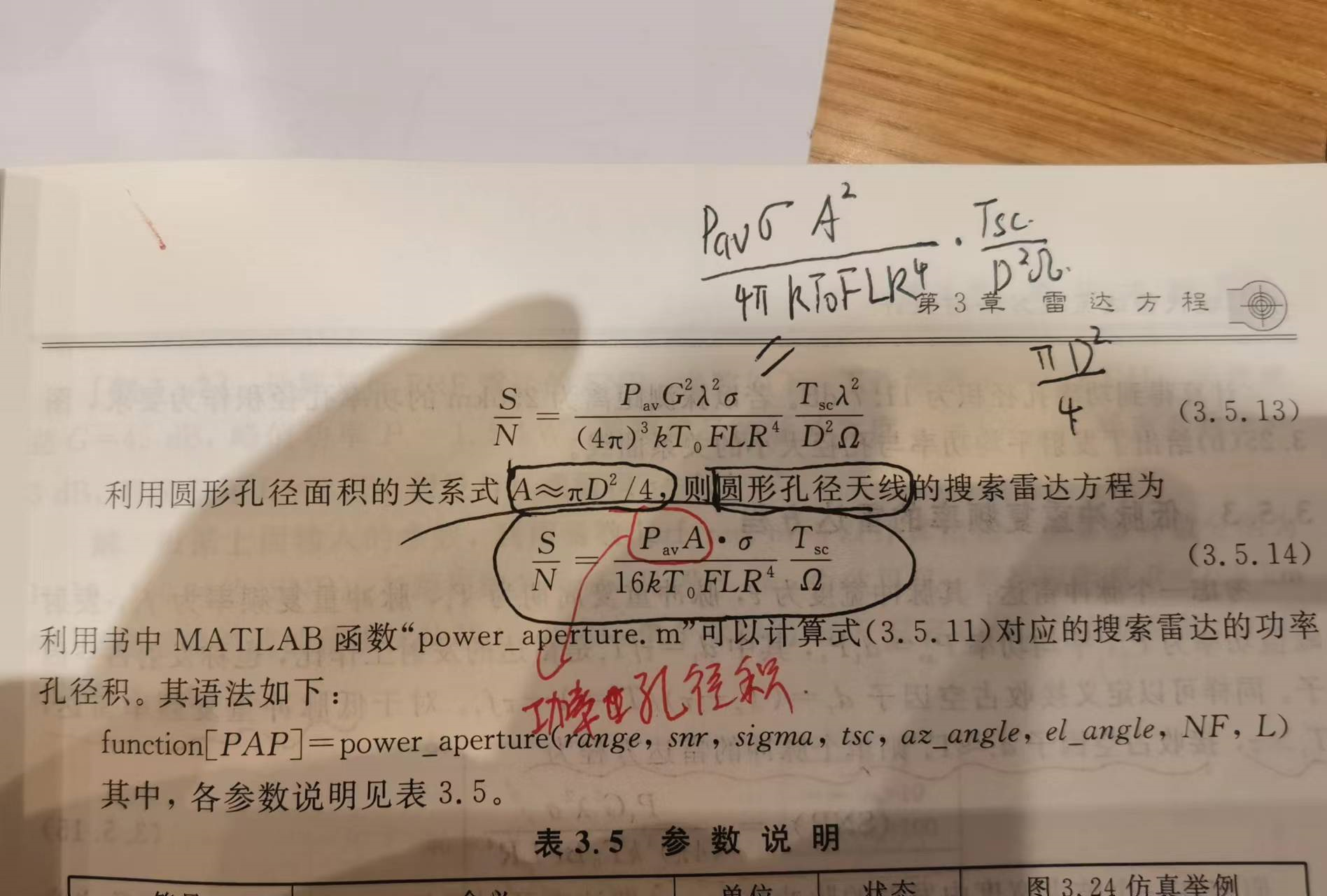
注意:搜索区域7.4sr=Π*3*Π/4,对应的搜索区域是半球的3/4,
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%搜索雷达方程,计算功率孔径积
%时间:2021年5月10日。
%sigma:目标截面积(dBsm),
%NF:噪声系数(dB),L:雷达损耗(dB)
%snr:信噪比(dB),range:距离(km);
%tsc:扫描时间,az_angle:搜索区域的方位角范围,el_angle:搜索区域的俯仰角范围
% PAP:雷达孔径积
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%function PAP=power_aperture(range,snr,sigma,tsc,az_angle,el_angle,NF,L)
clc
clear all
close all
range1=20:1:250; %无实际意义就是为了下面画图
snr=20;
sigma=[-20,-10,0];
tsc=2;
az_angle=180;
el_angle=135;
NF=8;
L=6;
omega=az_angle*el_angle/(57.296^2); %搜索空域的立体角
num1=10*log10(4.0*pi*(1.38e-23)*290*omega)+NF+L;
num2=snr+sigma'+10*log10(tsc);
PAP1=[]; %用于存放所有点的功率孔径积
for range=20:1:250
for j=1:3
PAP=num1-num2*ones(1,length(sigma(j)))+40*ones(length(sigma(j)),1)*log10(range*1000);
end
PAP1=[PAP1,PAP];
end
figure;
hold on;box on;
plot(range1,PAP1(1,:),'-');
plot(range1,PAP1(2,:),'--');
plot(range1,PAP1(3,:),'.-');
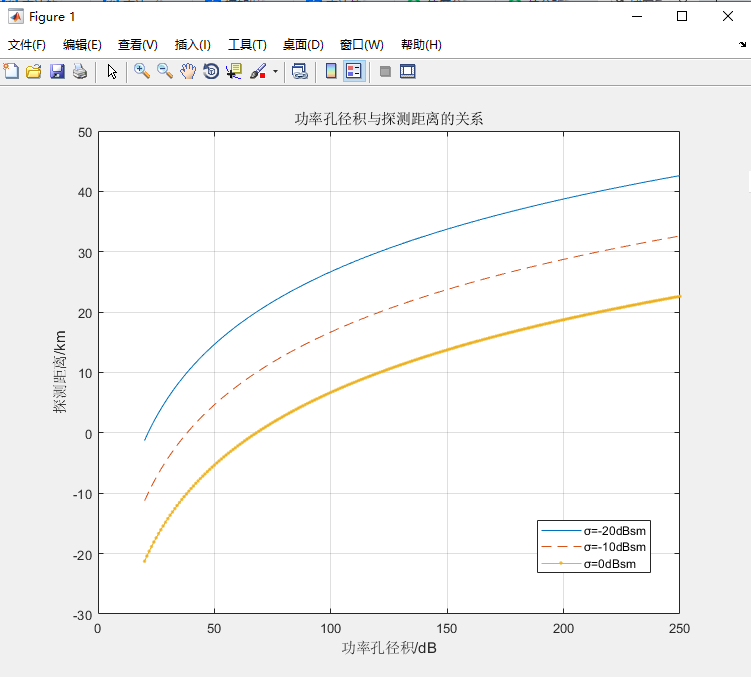
xlabel('功率孔径积/dB'),ylabel('探测距离/km');
legend('σ=-20dBsm','σ=-10dBsm','σ=0dBsm');
grid on;
title("功率孔径积与探测距离的关系")
参考资料:现代雷达系统分析与设计
