


参考内容:书籍《卡尔曼滤波原理及应用------matlab仿真》这本书对kalman算法的解析很清晰,MATLAB程序很全,适合初学者(如有侵权,请联系删除(qq:1491967912))
EKF滤波算法是建立在KF滤波算法的基础上,核心思想是,对于非线性系统,首先对滤波值![]() 的非线性函数
的非线性函数![]() 展开成泰勒级数但只保存一阶及以下部分(舍去二阶和高阶部分),得到近似的线性化模型。然后就是利用KF算法完成对目标的滤波估计等处理。
展开成泰勒级数但只保存一阶及以下部分(舍去二阶和高阶部分),得到近似的线性化模型。然后就是利用KF算法完成对目标的滤波估计等处理。
EKF的优点是不需提前计算标准轨迹(过程噪声W(k)与观测噪声V(k)为0时的非线性方程的解),但它的缺陷是只能在滤波误差 和一步预测误差
和一步预测误差 较小的时候才能使用。
较小的时候才能使用。
1、扩展kalman滤波原理
1.1 局部线性化
离散非线性系统动态方程可写为:

其中,当过程噪声W(k)和观测噪声V(k)恒为零时,模型1、2的解为非线性模型的理论解,称为“标称轨迹”或“标称状态”。另外,把非线性系统1、2的真实解称为“真轨迹”或“真实值”。
接下来是具体的数学推导。首先假定没有控制量的输入,过程噪声是均值为零的高斯白噪声,同时噪声的驱动矩阵G(k)是已知的,观测噪声V(k)是加性均值为零的高斯白噪声,并假定过程噪声W(k)和观测噪声V(k)二者之间相互独立。
首先进行的局部线性化的步骤,将EKF中的非线性模型局部线性化。这里会用到泰勒级数展开公式,关于泰勒级数的知识请参考如何通俗地解释泰勒公式?这里只给出泰勒公式的在0点的n阶展开公式:
 根据系统状态方程1,将非线性函数f(*)围绕滤波值
根据系统状态方程1,将非线性函数f(*)围绕滤波值![]() 做一阶泰勒展开,结果为:
做一阶泰勒展开,结果为:
 令
令
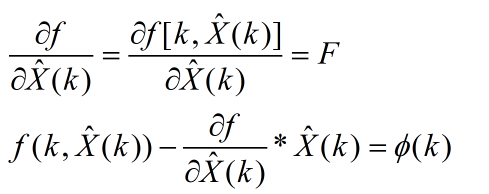 将上面两个公式带入到公式3中得到线性化的状态方程为:
将上面两个公式带入到公式3中得到线性化的状态方程为:
 状态初始值为X(0)=E[X(0)]。与KF算法相比,在已经求得前一步滤波值的条件下
状态初始值为X(0)=E[X(0)]。与KF算法相比,在已经求得前一步滤波值的条件下![]() ,状态方程4增加了非随机的外作用项
,状态方程4增加了非随机的外作用项 。
。
另外由系统量测方程,将非线性函数h(*)围绕滤波值![]() ,做一阶泰勒展开。得
,做一阶泰勒展开。得

令:
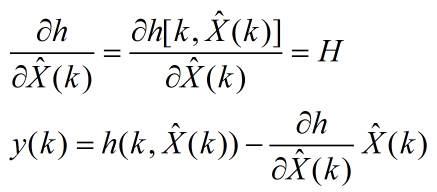
则观测方程为:

1.2、线性Kalman滤波
这样就将非线性化模型1、2转换为了线性化模型4、5,对这个线性化的模型应用kalman滤波基本方程可得扩展kalman滤波方程。
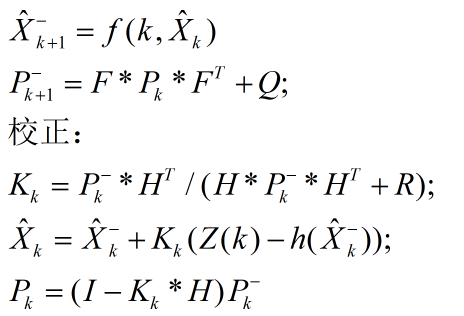
式中,滤波初值和滤波误差方差矩阵初值分别为:

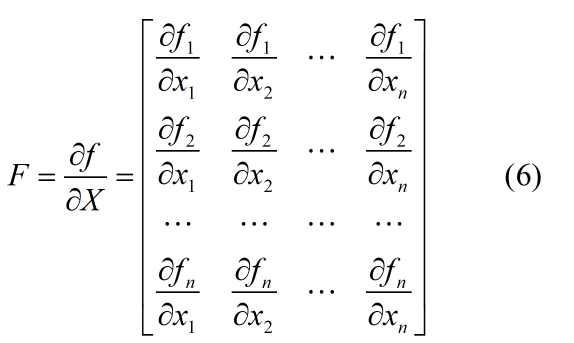
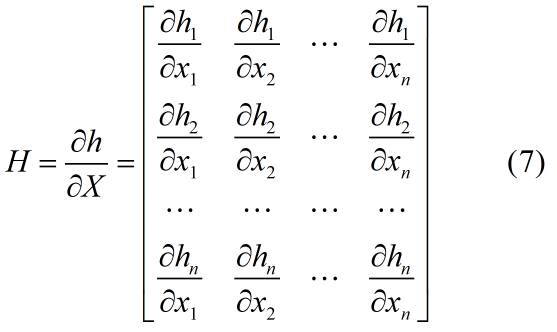
与kalman滤波基本方程相比,在线性化后的系统方程中,状态转移矩阵F和观测矩阵H由f和h的雅可比矩阵替代。假设状态变量有n维,即 ,则相应雅可比矩阵的求法如下。
,则相应雅可比矩阵的求法如下。
1.3、扩展Kalman滤波器九大步骤:
第一步:初始化初始状态方程X(0)、观测方程Z(0)、协方差矩阵P0;
第二步:状态预测:
 第三步:观测预测:
第三步:观测预测:
 第四步:一阶线性化状态方程,求解状态转移矩阵F。
第四步:一阶线性化状态方程,求解状态转移矩阵F。
 第五步:一阶线性化观测方程,求解观测矩阵H。
第五步:一阶线性化观测方程,求解观测矩阵H。
 第六步:求协方差矩阵预测
第六步:求协方差矩阵预测 。
。

第七步:求Kalman滤波增益

第八步:求状态更新

或者
第九步:协方差更新

上面的九个步骤就是EKF设计的一个计算周期,各个时刻EKF对非线性系统的处理就是这个计算周期不断循环的过程。
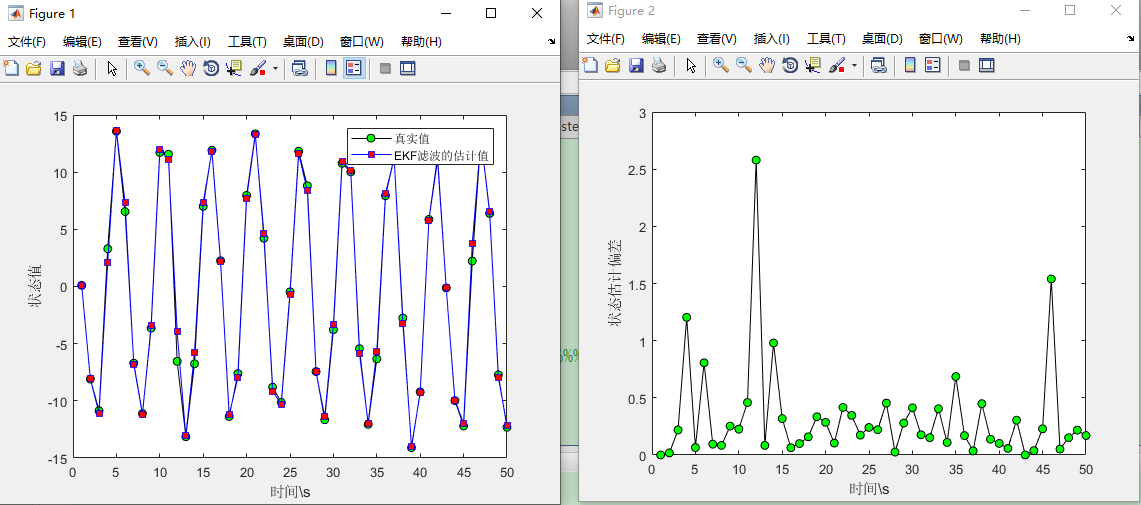
2、matlab仿真程序
假设总时间为50s,过程噪声方差Q=5;观测噪声方差R=2;系统的状态方程和观测方程为:
状态方程:X(k+1)=0.5X(k)+2.5X(k)/(1+X(k)^2)+8cos(1.2k)+w(k)
观测方程:Z(k)=X(k)^2/20+v(k)
其中w(k)、v(k)是对应的过程噪声和观测噪声。假设初值X(0)=0.1,协方差的初值为P=1;具体程序如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 | %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%函数功能:标量非线性扩展kalman滤波问题%状态方程:X(k+1)=0.5X(k)+2.5X(k)/(1+X(k)^2)+8cos(1.2k)+w(k)%观测方程:Z(k)=X(k)^2/20+v(k)%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clcclear allclose allT=50; %总时间Q=5; %Q值的改变会得到不同的滤波结果R=2; %测量噪声%产生过程误差w=sqrt(Q)*randn(1,T);%产生测量噪声v=sqrt(R)*randn(1,T);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%状态方程X=zeros(1,T);X(1)=0.1; %状态方程初始化Z=zeros(1,T);Z(1)=X(1)^2/20+v(1); %测量方程初始化for i=2:T X(i)=0.5*X(i)+2.5*X(i)/(1+X(i)^2)+8*cos(1.2*i)+w(i); Z(i)=X(i)^2/20+v(i);endXekf=zeros(1,T);Xekf(1)=X(1);I=eye(1);P=[1];for i=2:T Xekf(i)=0.5*X(i)+2.5*X(i)/(1+X(i)^2)+8*cos(1.2*i); %状态预测 Z1(i)=X(i)^2/20; F=0.5+2.5*(1-Xekf(i))/(1+Xekf(i)^2)^2; %求解状态转移矩阵 H=Xekf(i)^2/20; %求解观测矩阵 P1=F*P*F+Q; K=P1*H'/(H*P1*H'+R); X(i)=Xekf(i)+K*(Z(i)-Z1(i));<br> P=(I-K*H)*P1;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%5%%%%误差分析Xstd=zeros(1,T);for i=1:T Xstd(i)=abs(X(i)-Xekf(i));end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%画图figure;hold on;box on;plot(X,'-ko','MarkerFace','g');plot(Xekf,'-bs','MarkerFace','r');legend('真实值','EKF滤波的估计值');xlabel('时间\s');ylabel('状态值');%误差分析figure;hold on;box on;plot(Xstd,'-ko','MarkerFace','g');xlabel('时间\s');ylabel('状态估计偏差'); |
以上就是关于扩展Kalman滤波的全部原理和公式如果有错误还请批评指正。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 一文读懂知识蒸馏
· 终于写完轮子一部分:tcp代理 了,记录一下