
今天利用kalman滤波对船舶GPS导航定位系统进行分析。首先还是先对kalman滤波的知识进行了解。
参考内容:书籍《卡尔曼滤波原理及应用------matlab仿真》
卡尔曼知识
模型建立
观测方程:Z(k)=H*X(k)+V(k);
状态方程:X(k)=A*X(k-1)+W(k-1);
其中,X(k)为系统在时刻k的状态,Z(k)为对应状态的测量值。W(k)为输入的白噪声(也是过程误差),V(k)为观测噪声(也是测量误差),W(k),V(k)是均值为零,方差阵各为Q和R的不相关白噪声。A为状态转移矩阵,H为观测矩阵。
卡尔曼滤波:
预测 校正
先验估计 : 卡尔曼增益:
卡尔曼增益:
先验协方差误差 : 后验估计:
后验估计:
协方差:
样例分析:
图为舰船GPS导航定位原理图,GPS接收机可以实时接收到在轨的导航卫星发射的信号,通过信号可以计算出船的位置和速度。由于民用GPS导航卫星发射的信号认为的加入了一些高频振荡随机干扰信号,导致产生的微信信号会产生高频抖动,所以为了提高定位精度,需对GPS关于船舶位置和速度的信息进行滤波。在GPS系统中的干扰信号可看成是GPS定位中的观测噪声。观测噪声的方差可以通过GPS观测信号求得。

假设航行轨迹是沿某直线方向航行。设置采样时间为T0,用s(k)表示船舶在采样时刻kT0处的真实位置,用y(k)表示在采样时刻kT0处GPS定位的观测值,则观测模型:
y(k)=s(k)+v(k);
上式中v(k)表示GPS定位误差(观测噪声),可以假定其是零均值、方差为 的白噪声,方差
的白噪声,方差 可以通过大量观测试验数据用统计方法获取。
可以通过大量观测试验数据用统计方法获取。 表示在时刻kT0时船舶的速度。加速度为a(k),所以由运动公式有:
表示在时刻kT0时船舶的速度。加速度为a(k),所以由运动公式有:

而其中的加速度a(k)由两个部分决定:机动加速度u(k)和随机加速度w(k)(其实可以看作过程误差):
a(k)=w(k)+u(k);
式中,u(k)为船动力系统的控制信号,它是人为输出的已知的信号,w(k)是过程误差,可以看作一个零均值、方差为 的独立与v(k)的白噪声。定义在采样时刻kT0处系统的状态x(k)的船舶的位置和速度,即:
的独立与v(k)的白噪声。定义在采样时刻kT0处系统的状态x(k)的船舶的位置和速度,即:

可以得到船舶的运动方程为:

观测方程为:
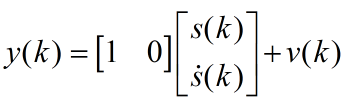
可以得到系统的状态空间模型为
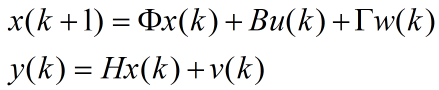

因此船舶GPS导航定位kalman滤波问题就是:基于GPS观测数据(y(1),y(2),......,y(k)),得到船舶在k时刻的位置s(k)的最有估计 。
。
在不考虑机动目标自身的动力也就是说u(k)=0,将匀速直线运动的船扩展开可以得到下面的公式。

状态方程包含水平距离和速度和纵向距离和速度。因此状态方程可以表示为:

MATLAB仿真
假定船只在二维水平面上运动,初始位置为(-100,200)m,水平运动速度为2m/s,垂直方向运动速度为20m/s,GPS扫描周期为T=1s,观测噪声的均值为0,方差为100.过程噪声越小,目标越接近匀速直线运动;否则为曲线运动。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%kaiman滤波在船舶GPS导航定位系统中的应用
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clc
clear all
close all
T=1; %雷达扫描周期
N=80/T; %总的采样时间
X=zeros(4,N); %目标的真实位置和速度。状态方程的初始化
X(:,1)=[-100,2,200,20]; %目标初始位置和速度(x,vx,y,vy)
Z=zeros(2,N); %传感器对位置的观测,观测方程初始化
Z(:,1)=[X(1,1),X(3,1)]; %观测初始化,x,y
Xkf=zeros(4,N); %kalman滤波处理的状态,也是估计值
Xkf(:,1)=X(:,1);
delta_w=1e-2; %增大该值会导致目标真实轨迹成曲线
Q=delta_w*diag([0.5,1,0.5,1]); %过程噪声均值
R=100*eye(2); %观测噪声均值
F=[1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1]; %状态转移矩阵
H=[1,0,0,0;0,0,1,0]; %观测矩阵
P0=eye(4); %协方差矩阵
I=eye(4); %I矩阵
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for i=2:N
X(:,i)=F*X(:,i-1)+sqrtm(Q)*randn(4,1); %目标的真实轨迹,状态方程
Z(:,i)=H*X(:,i)+sqrtm(R)*randn(2,1); %对目标的观测,观测方程
end
%kalman滤波
for i=2:N
X_pre=F*Xkf(:,i-1); %预测
P_pre=F*P0*F'+Q; %预测误差协方差
K=P_pre*H'*inv(H*P_pre*H'+R); %卡尔曼增益
Xkf(:,i)=X_pre+K*(Z(:,i)-H*X_pre); %状态更新
P0=(I-K*H)*P_pre; %协方差更新
end
%误差分析
for i=1:N
Err_Observation(i)=RMS(X(:,i),Z(:,i)); %真实值与观测值的误差
Err_KalmanFilter(i)=RMS(X(:,i),Xkf(:,i)); %真实值与kaiman滤波的误差
end
%画图
figure
hold on;box on;
plot(X(1,:),X(3,:),'k-'); %真实轨迹
plot(Z(1,:),Z(2,:),'b-'); %测量轨迹
plot(Xkf(1,:),Xkf(3,:),'-ko'); %kalman滤波轨迹
legend("真实轨迹",'观测轨迹','kalman滤波轨迹');
xlabel('横坐标X/m');
ylabel('纵坐标Y/m');
grid on;
figure;
hold on;box on;
plot(Err_Observation,'ko-','MarkerFace','g');
plot(Err_KalmanFilter,'ks-','MarkerFace','r');
legend("滤波前误差",'滤波后误差');
xlabel('观测时间/s');
ylabel('误差值/m');
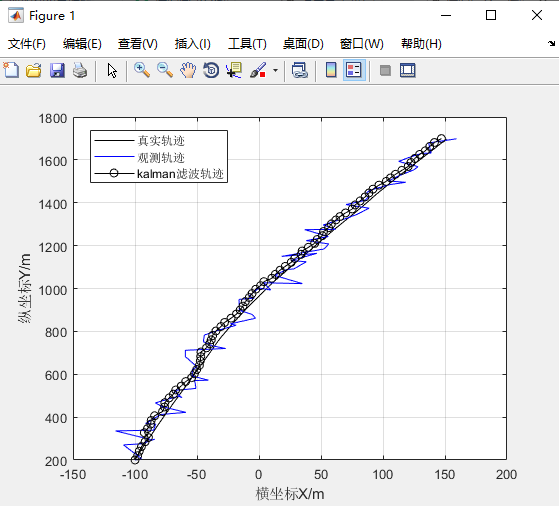
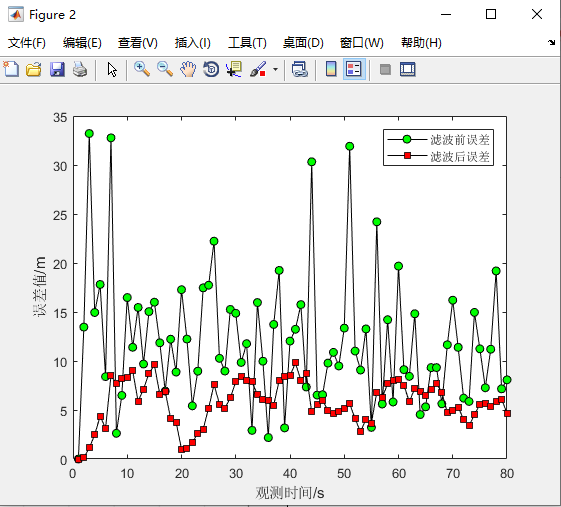
从图1中可以看到观测轨迹与真实轨迹相比,存在明细的抖动情况,而经过kalman滤波的更加稳定一些。图2可看出真实轨迹和观测轨迹的误差还是很大的,最大误差快要接近35米,而kalman的误差相对来说会更稳定。
综合来看,kalman滤波虽然不能完全消除噪声,但是已经最大限度地降低噪声的影响了。
展望和总结
关于线性kalman滤波算法的应用到这已经结束。kalman滤波能够在线性高斯模型条件下,对目标的状态做出最优的估计,得到较好的跟踪结果。但实际情况总是存在不同的非线性,而针对非线性的情况,kalman滤波已经不能满足要求,对于非线性的情况,就需要运用kalman的延伸-------EKF(扩展kalman)。之后会对EKF进行学习和研究。
