
1、目标的方向信息
目标的方向是通过测量回波的波前到达雷达的角度来确定的。雷达一般使用方向性天线,即具有窄辐射方向图的天线进行波束的方位向和俯仰向的扫描。当接收信号的能量最大时,天线所指向的方向就是目标所在方向。这种或者其他测量方向的方法都假定大气不扰乱无线电波的直线传播。
入射波前的方向也可通过测量两个分离的天线所接收的相位差来决定,而相位差则取决于入射波前和两天线连线的夹角。两天线分开越远,则精度越高。然而如果天线分的太开,就会在两个天线的合成方向图中出现大小等于主波束的栅瓣而产生模糊的测量结果。
2、相位法测角:
基本原理:
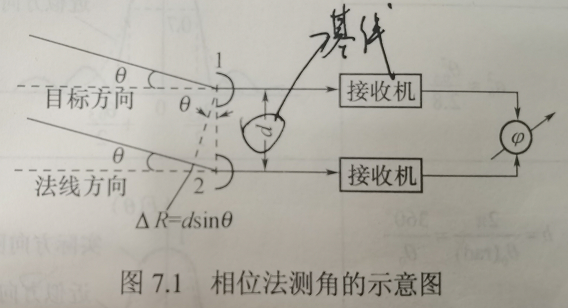
相位法测角利用多个天线所接收回波信号之间的相位差进行测角。设在θ方向有远区目标,则到达接收点的目标所反射的电波近似为平面波。由于两天线间距为d,故它们所收到的信号由于存在的波程差ΔR而产生一相位差φ.
式中,λ为雷达波长。如用相位计进行比相,测出其相位差φ,就可以确定目标方向θ。
注:通常两天线的间距d较小,使得相位差φ的值不超过2pi。因此短基线可保证较大的无模糊测角范围,
2、测角误差与多值性问题
相位差φ值测量不准将产生测角误差,上式两边微分,则它们之间的关系为:
采用读数精度高(dφ小)的相位计,或减小λ/d值(或增大d/λ),均可提高测角精度。我们还注意到:当θ=0时,即目标处在天线法线方向时,测角误差dθ最小。当θ增大时,dθ也增大,为保证一定测角精度,θ的范围有一定的限制。
增大d/λ可提高测角精度,但在感兴趣的θ范围内,当d/λ增大到一定时,φ值可能超过2pi,这时φ=2pi*N+ψ,其中N为整数;ψ<2pi,而相位计实际读数为ψ。又因为N值未知,因而真实的φ值不能确定,会出现模糊问题。
比较有效的方法利用三天线测角设备,间距大的1、3天线用来得到高精度测量,而间距小的1、2天线用来解决多值性。
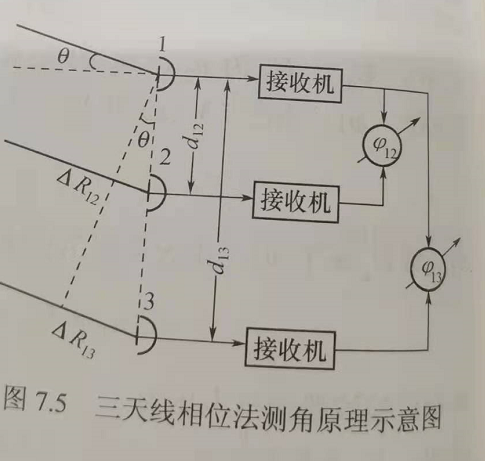
首先天线1、2收到的信号之间的相位差在测角范围内满足:

其中φ12由相位计测得。
同样天线1、3收到信号的相位差为:
由相位计读出的φ13,但实际读数是小于2pi的ψ。为了得到N值,可利用如下关系。

通过求的φ12就可得到φ13关于N的结果。从而保证所要求的测角精度。
