
雷达分辨率
指雷达将两个目标分辨为分离目标所需的差异,代表了雷达在密集目标环境下分辨多目标的能力。
雷达分辨率通常包括距离分辨率、速度分辨率和角度分辨率。直观来看,距离分辨率取决于脉冲宽度。速度分辨率取决于相参积累时间,雷达的角度分辨率则与天线的波束宽度有关,包括方位和俯仰。
测距原理
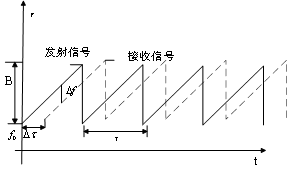
图2.4 锯齿波LFMCW发射与接收信号
LFMCW雷达发射出来的信号经运动的物体发生反射后,回波和发射信号基本一样,只是发生了一段延迟 ,其中,
,其中, ,表示雷达发射的信号经过距离R的回波时延,其中R表示目标与雷达之间的间距,c为光速,一般情况下
,表示雷达发射的信号经过距离R的回波时延,其中R表示目标与雷达之间的间距,c为光速,一般情况下 .
.
当目标静止不动,不会出现多普勒效应,所以锯齿波LFMCW雷达的发出去的信号与接收回来的信号频差是常数,且距离成正比,其表达式如下:
距离分辨率:
距离分辨率是指将在距离维将两个大小相等的点目标区分开的最小距离。
公式推导:
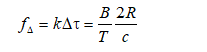
FMCW雷达测距原理的介绍可知
 (2.30)
(2.30)
其中 为相应的被测目标差拍信号的频率差,B为调频带宽,T为调频周期,c为光速,R为雷达到被测目标的距离。差拍信号在数字信号处理过程中,FFT频率分辨率为:
为相应的被测目标差拍信号的频率差,B为调频带宽,T为调频周期,c为光速,R为雷达到被测目标的距离。差拍信号在数字信号处理过程中,FFT频率分辨率为:
 (2.31)
(2.31)
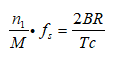
其中M为采样点数, 为采样频率,因此第k个采样点的频率为:
为采样频率,因此第k个采样点的频率为:

又因为距离维上单个周期的chirp序列扫频周期很短,多普勒频率带来的影响可以忽略不计。可认为此时在距离维上提取的运动条件下的差频与静止情况下近似相等,假设回波信号的中心频率 ,则有:
,则有:
 (2.33)
(2.33)
同时假设 为距离维中目标对应的坐标序列号。由公式2.32可得相应的回波信号频率为。
为距离维中目标对应的坐标序列号。由公式2.32可得相应的回波信号频率为。
 (2.34)
(2.34)
联立公式2.33和2.34可知:
 (2.35)
(2.35)
求得距离为
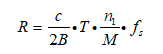 (2.36)
(2.36)
又因为: ,其中Ts为采样频率。因此可将上式化简为
,其中Ts为采样频率。因此可将上式化简为
所以最后可得距离分辨率与有效带宽直接相关
 (2.37)
(2.37)
实际距离分辨率
实际的距离分辨力则复杂的多。雷达通常会对信号进行调制来增加信号带宽,典型的有线性调频信号和相位编码信号,在接收时采用脉冲压缩技术将脉冲宽度压窄,从而达到在不降低雷达平均功率(不减少时宽)的情况下,提高距离分辨率。
雷达在对调制信号进行脉冲压缩时,通常会进行加权处理,来降低旁瓣,但加权会导致主瓣展宽,因此脉压后的距离分辨率要乘以一个常数,具体是和加权函数有关。
为了全面考虑距离自相关函数主峰、旁瓣对分辨能力的影响,Woodward定义了一个反映分辨特性的参数:时延分辨常数,他与信号的有效带宽成反比。
时延分辨常数。
距离分辨率与时延分辨常数的关系:
时延分辨常数是将相应主峰、旁瓣或类似噪声基底的全部能量计算在一起,除以主峰最高点功率所得的时间宽度。时延分辨常数越小,距离自相关函数的主峰窄、旁瓣或基底小,对分辨目标是有利的。
文献参考:雷达通信电子战

 浙公网安备 33010602011771号
浙公网安备 33010602011771号