会员
周边
新闻
博问
闪存
赞助商
YouClaw
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
Loading
sasasatori
博客园
首页
新随笔
联系
订阅
管理
上一页
1
···
8
9
10
11
12
13
14
下一页
2022年8月21日
我对EE学科知识体系的一点理解
摘要: 前言 研究生一年级的分都出完了,鉴于学分已经修够了,可以说学生时期上课、写作业、考试的日子也基本上到头了。 有幸高中升大学时挑选了一个自己感兴趣的专业(电子信息工程),学习之路虽然难言轻松,但还是乐在其中的。按照本科4年+研究生1年来算,共5年的学习时间,北京理工大学和中国科学院大学的课堂算是帮助了
阅读全文
posted @ 2022-08-21 18:28 sasasatori
阅读(1951)
评论(1)
推荐(2)
2022年7月22日
中国科学院大学模数转换器作业开源
摘要: 1.编写12-bit SAR-ADC的行为级模型: clear; %% 信号产生 fclk=1e6; %采样时钟 N=8192; %采样点数 fsig=fclk/N*13; %信号频率 amp=1.0; %信号幅度 vi=amp*sin(2*pi*fsig/fclk*(1:N)); %输入信号 %%
阅读全文
posted @ 2022-07-22 20:42 sasasatori
阅读(2109)
评论(3)
推荐(2)
2022年6月27日
集成温度传感器电路技术报告
摘要: 《集成温度传感器电路技术报告》 1. 摘要 集成温度传感器广泛用于许多测量和控制系统。对于此类应用,两个传感器规格至关重要:精度和能源效率。精度定义了最终系统的误差,而能源效率定义了实现给定分辨率所需的能量,对于电池供电的系统尤其重要。 本文针对集成温度传感器及其接口电路的应用背景,基本原理,关键指
阅读全文
posted @ 2022-06-27 22:53 sasasatori
阅读(1893)
评论(0)
推荐(0)
2022年5月16日
an IGZO TFT based near-sensor CIM survey
摘要: TFT based near-sensor process techniques Thin-film materials and technologies are quite important for large-area flexible electronics , whose future a
阅读全文
posted @ 2022-05-16 21:03 sasasatori
阅读(468)
评论(0)
推荐(0)
2022年3月22日
模拟集成电路实践记录_版图及DRC LVS
摘要: ### 实验六,版图 #### 6.1 实验背景 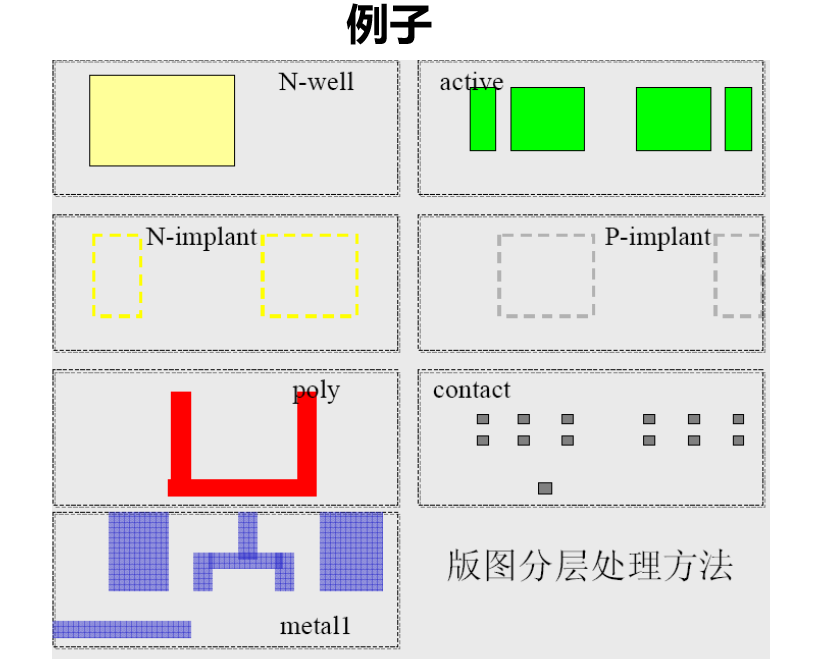 
评论(1)
推荐(0)
2022年3月17日
模拟集成电路实践记录_运算放大器的负反馈
摘要: ### 实验五,运算放大器的负反馈 #### 5.1 实验背景 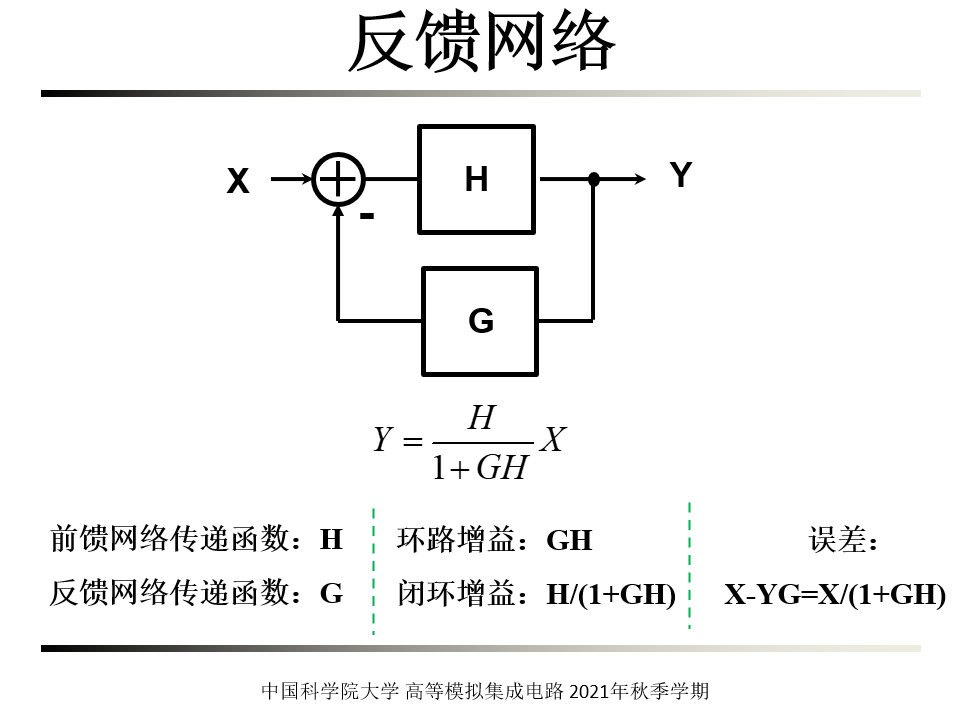 
评论(0)
推荐(0)
2022年3月15日
模拟集成电路实践记录_米勒补偿两级放大器
摘要: 实验四,米勒补偿两级放大器 4.1 实验背景 第一级差模放大倍数: \[A_{v1}=-g_{m1,2}(r_{o2}//r_{o4}) \]第二级放大倍数: \[A_{v2}=g_{m6}(r_{o6}//r_{o7}) \]总的开环增益为: \[A_{vd}=A_{v1}A_{v2}=-g_{m
阅读全文
posted @ 2022-03-15 16:39 sasasatori
阅读(4775)
评论(5)
推荐(1)
2022年3月2日
模拟集成电路实践记录_共源极差分放大器
摘要: ### 实验三,共源极差分放大器 #### 3.1 实验背景 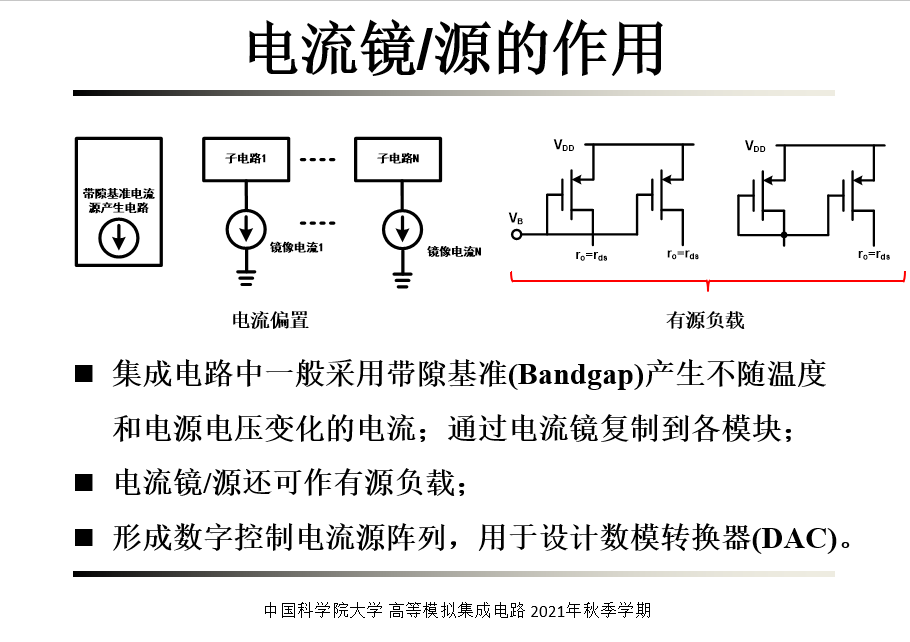 
评论(0)
推荐(1)
2022年2月24日
模拟集成电路实践记录_三种MOS单管放大器
摘要: ### 实验二,三种MOS单管放大器 #### 2.1 实验背景 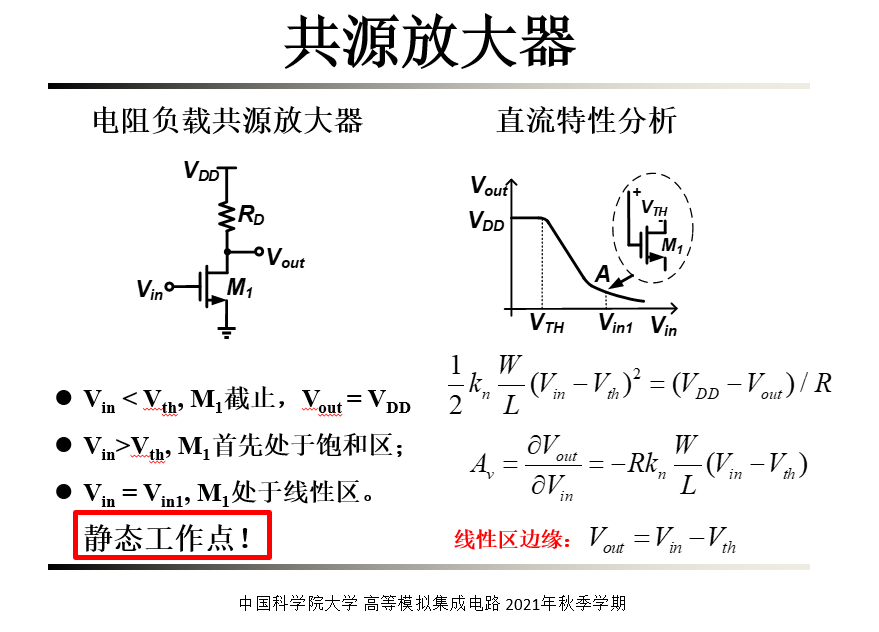 
评论(0)
推荐(1)
2022年2月22日
模拟集成电路实践记录_MOS的特性曲线
摘要: ## 模拟集成电路实践记录 本实践记录以北京理工大学微电子实验室培训教程为参考,结合我的个人学习经历和工作方向进行了一定的思考和整理。 我本科阶段参与的竞赛主要为数字方向,对于算法,单片机,FPGA,数字前后端花了很多时间去学习课外的知识以及参与实践,并感到裨益匪浅。但模拟方向只是上过理论课,缺乏实
阅读全文
posted @ 2022-02-22 10:50 sasasatori
阅读(6637)
评论(1)
推荐(1)
2022年2月17日
中国科学院大学数字集成电路作业开源——64位FFT/IFFT数字逻辑运算电路的Verilog实现
摘要: 中国科学院大学数字集成电路作业开源——大作业 0、说明 本次大作业难度不算大,但是还是花了不少时间,主要是以前学习DSP时其实对FFT的理解仍然是肤浅的,没有深入思考过用代码实现的问题,而借着这次大作业的机会,我深入的梳理了一遍蝶形单元的组成形式,DIT-FFT和DIF-FFT,IFFT和FFT的关
阅读全文
posted @ 2022-02-17 21:43 sasasatori
阅读(7347)
评论(17)
推荐(3)
中国科学院大学数字集成电路作业开源——函数运算器章节
摘要: 中国科学院大学数字集成电路作业开源——第11章 0、说明 第9,10章节分别为高层次综合(HLS)和低功耗设计,没有布置作业,因此接在第8章后就直接是第11章节。 此外,本章节的算法开发与验证需要C/C++和matlab实现的bench,这些内容我放在附录中。 一个经验是,当涉及到这种算法相关的逻辑
阅读全文
posted @ 2022-02-17 20:44 sasasatori
阅读(2203)
评论(5)
推荐(0)
2022年2月12日
中国科学院大学数字集成电路作业开源——时序逻辑与存储器章节
摘要: 中国科学院大学数字集成电路作业开源——第6-8章 1、基础概念问题 1.1 请简要描述Mealy状态机与Moore状态机的特性及它们之间的联系? Moore状态机:输出仅仅与当前状态有关; Mealy状态机:输出不仅取决于当前状态,还和输入有关; Mealy和Moore机之间可以相互转化,对于每个M
阅读全文
posted @ 2022-02-12 23:10 sasasatori
阅读(5080)
评论(9)
推荐(0)
中国科学院大学数字集成电路作业开源——算数逻辑章节
摘要: 中国科学院大学数字集成电路作业开源——第4-5章 1、基础概念问题 1.1请简要描述10进制整数与16进制整数之间相互转换方法? 方法1:将10进制整数通过除2取余数的方法得到2进制表示,再将2进制数按照每4位表示一个16进制数的方式转成16进制表示。 方法2:将10进制整数通过除16取余数的方法直
阅读全文
posted @ 2022-02-12 23:09 sasasatori
阅读(6066)
评论(5)
推荐(2)
中国科学院大学数字集成电路作业开源——组合逻辑章节
摘要: 中国科学院大学数字集成电路作业开源——第1-3章 0、说明 开源内容为中国科学院大学《高等数字集成电路分析与设计》课程的个人作业答案,此开源仅供学习交流,禁止未经作者同意的转载或抄袭。此外作业中可能有一些不严谨甚至出错的地方,欢迎各位读者在评论区中指出,一些有疑问的地方也欢迎讨论。 所有代码均已上传
阅读全文
posted @ 2022-02-12 19:48 sasasatori
阅读(8278)
评论(0)
推荐(0)
2022年1月10日
基于阻变存储器阵列的低功耗神经网络存算一体结构研究进展综述
摘要: 《基于阻变存储器阵列的低功耗神经网络存算一体结构研究进展综述》 1. 摘要 忆阻器件组成的阻变存储器阵列具备存算一体能力,将神经网络的权重映射到忆阻器的电导值后,阻变存储器阵列可以用于高能效的神经网络推理和训练运算,但器件的脉冲编程非理想性和非理想的保持特性与耐擦写特性会造成计算上的精度损失。通过合
阅读全文
posted @ 2022-01-10 12:06 sasasatori
阅读(4445)
评论(8)
推荐(0)
语言模型发展综述
摘要: 语言模型发展综述 摘要 语言模型(language model)是自然语言处理中非常基础且重要的问题。本文首先介绍了语言模型的定义及其应用场景,接着说明了语言模型的发展历史,本文将语言模型分为统计语言模型和神经网络语言模型两个大阶段,对各个阶段中出现的语言模型的特点、数学原理、对之前模型的改进,以及
阅读全文
posted @ 2022-01-10 11:46 sasasatori
阅读(2831)
评论(0)
推荐(1)
2022年1月8日
2021年度总结
摘要: 2021年总结 对我而言,2021年的主题词是——反思与成长。 这张照片拍摄的时间是5月23号,当时RoboMaster北部分区赛刚刚结束,我走出场馆,奔赴北京理工大学四号楼,准备用两天的时间完成我即将在5月25号截止提交,可是才写了5000字的毕业设计论文。 我的2021年被7月和8月很好地切分开
阅读全文
posted @ 2022-01-08 16:10 sasasatori
阅读(942)
评论(2)
推荐(0)
2021年9月5日
《团队协作的五大障碍》读后感
摘要: 《团队协作的五大障碍》读后感 一、说明 本文主要的目的是记述阅读帕特里克.兰西奥尼的《团队协作的五大障碍》后,我将其与自己2020.10至2021.5对北京理工大学机器人队的领导工作的实际经历进行联系,总结出的一些想法,并以书中列出的五大障碍作为提纲。 首先,领导性的工作自然与专业领域会有一定的关联
阅读全文
posted @ 2021-09-05 20:37 sasasatori
阅读(2981)
评论(0)
推荐(1)
2021年7月28日
数字asic流程实验 结语
摘要: 我是临近放暑假时从导师处拿到的做数字asic流程实验的任务,由于人不在学校,无法使用校内服务器,不得不自己上网找软件,工艺库等等,花了不少的心思。又因为环境全是自己搭建,Verilog也是自己编写,没有直接用实验给的,导致踩了不少稀奇古怪的坑,如物理库(physical lib)的文件由于文件名的冒
阅读全文
posted @ 2021-07-28 21:47 sasasatori
阅读(1115)
评论(10)
推荐(3)
上一页
1
···
8
9
10
11
12
13
14
下一页
公告
 浙公网安备 33010602011771号
浙公网安备 33010602011771号