模拟集成电路设计系列博客——8.3.1 抖动与相位噪声
8.3.1 抖动与相位噪声
不像大部分集成电路中的模拟信号以电压或电荷来承载信息,对于时钟波形来说,其重要方面在于其穿越某些特定阈值时的特定时间点。抖动是这些特定时间点上的随机偏差,而相位噪声是这些时间点上的随即偏差,相位噪声则是抖动的频域表示。由于抖动和相位噪声由热噪声和其他所有电路中存在的其他噪声源导致,他们对任何片上时钟参考都会产生很大的限制,这使得其在PLL设计中至关重要。
一个典型的时钟信号如下图所示:
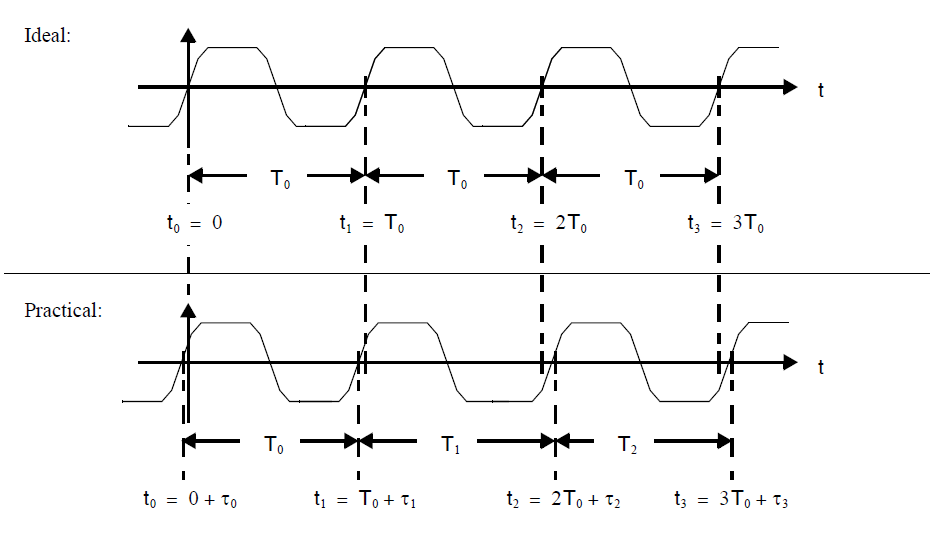
转换时间被标记为\(t_k\),这些时间可能是一个逻辑信号反转状态的时间,也有可能是开关切换状态的时间。对于这个例子来说,只需要考虑转换上升沿的情况,但在实际电路中,转换上升沿和转换下降沿都是值得关注的。对于理想时钟来说,所有的转换点都是等距的,从而\(t_k=kT_0\),这里\(T_0\)是时钟周期。但在实际时钟下,这些转换点会偏离它们的理想值。
具体来说,定义转换点时间与其理想值的偏离为离散时间序列\(\tau_k\):
序列\(\tau_k\)为单位时间下时钟的绝对抖动,可以归一化到角频率:
绝对抖动是一个有用的分析工具,但是其在实验时无法直接进行测量,因为这样的话需要一个理想的时钟,但事实上是无法获取的。
例题1:
求得幅度为\(A\),角频率为\(\omega_0\)带有方差为\(\sigma_n^2\)的噪声\(n(t)\)的正弦信号的绝对抖动。
解答:
正弦信号可以表示为:
假定噪声\(n\)远小于信号的振荡幅度,即\(\sigma_n<<A\),转化时间\(v(t)\)略微偏离于其标准值\(kT_0\)。偏离量可以从围绕转换点的斜率\(A\omega_0\)来进行估计,噪声的采样\(n(t)\),标记为\(n_k\):
该离散噪声过程\(n_k\)是方差为\(\sigma_n^2\)的白噪声,因此绝对抖动也是一个离散时间白噪声过程,方差为:
在高频\(\omega_0\),并且正弦信号振幅\(A\)够大时,抖动受到其过零点附近的大斜率的影响而减小,通过角频率来描述,可以消除频率的影响:
例题2:
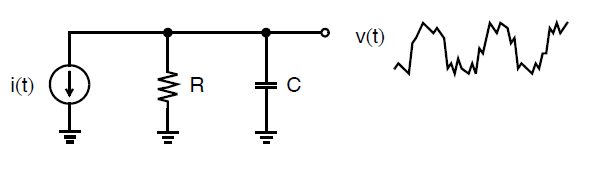
如下图所示,假定\(i(t)\)为一个理想正弦信号电流源,幅度为\(1mA\),\(R=1k\Omega\),\(C=1pF\)。求得\(v(t)\)的频率为\(1MHz\)时以及频率为\(1GHz\)时,绝对抖动\(v(t)\)的方差。
解答:
电压\(v(t)\)恰好是\((8.3.3)\)的形式,其中\(n(t)\)是由\(R\)的热噪声引起的高斯分布电压噪声。\(n(t)\)的方差为:
温度\(300K\)对应的均方值为\(64.4\mu V\)。幅度\(A\)取决于振荡频率\(f\),在\(1MHz\)时,幅度非常接近\((1mA)(1k\Omega)=1V\),因此代入\((8.3.5)\)有:
在\(1GHz\)时,\(v(t)\)的幅度受到RC低通滤波器的影响,\(A=0.157V\),因此:
注意以时间单位来看,\(1GHz\)情况下抖动变得更小,但是以角频率表达时,实际上\(1GHz\)下的抖动更大,这是由于\(v(t)\)的幅度减小了。
相位噪声是绝对抖动的频域表示。因此我们定义\(S_{\phi}(f)\),将带有随机抖动的时钟信号的相位噪声,用序列\(\phi_k\)的功率谱密度来描述。电压的噪声功率谱密度指的是在每\(1Hz\)单位频谱下电压信号的能量,因此其单位为\(V^2/Hz\)。类似的,\(S_{\phi}(f)\)确定了每\(1Hz\)单位频谱下\(\phi_k\)的能量(以\(rad^2\)为单位),因此\(S_{\phi}(f)\)的单位为\(rad^2/Hz\)。更进一步的,\(\phi_k\)的方差由\(S_{\phi}(f)\)在全频率下的积分给出。由于习惯上以时间单位而不是弧度来量化抖动,因此通常表示如下:
对两侧取平方根可以得到绝对抖动的均方根:
上面的两个公式是时域绝对抖动和相位噪声之间的关键关联。
例题3:
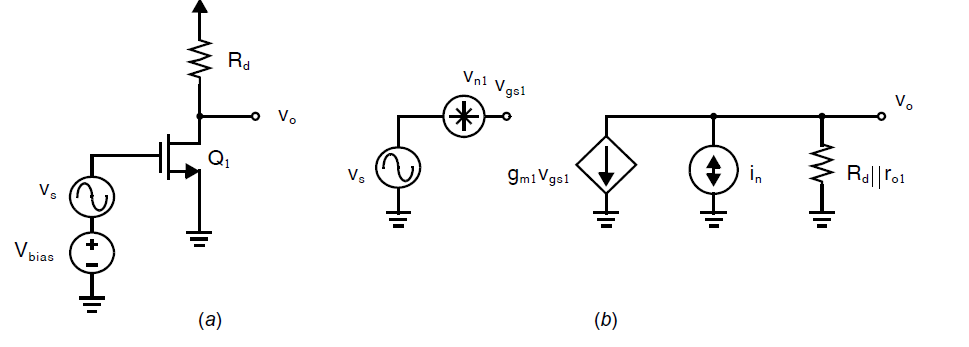
考虑如下图(a)所示的共源放大器,晶体管\(Q_1\)被直流电压\(V_{bias}\)偏置在饱和区,\(v_s\)是一个幅度为\(|V_s|\)的无噪声小信号正弦波。估计包括电阻的热噪声和晶体管的闪烁噪声引发的输出上的相位噪声。
解答:
小信号等效电路如下图(b)所示,电压噪声源\(v_{n1}\)建模了晶体管\(Q_1\)的闪烁噪声,且噪声频谱密度为:
噪声电流源\(i_n\)包含了电阻热噪声和晶体管闪烁噪声:
这使得\(v_o\)的形式如\((8.3.3)\),一个叠加了噪声的正弦电压。正弦的部分幅度为\(|V_s|g_{m1}(R_d||r_{o1})\),通过常规的噪声电路分析,可以得到下图(b)中的电压噪声频谱密度:
假定正弦信号在\(v_o\)处的过零点受到噪声微小的影响,使用\((8.3.4)\)的近似,以相位的形式,我们有:
其中\(n_k\)是采样噪声电压\(v_{o,n}\),因此相位噪声为:
注意此处有一个\(1/f\)噪声分量和一个白噪声分量。
还有一些其他测量抖动的方式。一个抖动的时钟意味着随时间变化的周期:
当前周期偏离其标准值\(T_0\)的偏差称为周期抖动:
这个公式意味着周期抖动可以通过绝对噪声序列\(\tau_k\)输入\((z-1)\)离散时间滤波器来获取。因此,其方差可以看作是相位噪声的积分被一个\((z-1)\)滤波器滤波:
其中被积项\(sin^2(\pi fT_0)\)来自于\((z-1)\)滤波器。
周期噪声在实验中相比绝对噪声更好衡量,因为并不需要参考。更进一步的,周期抖动在数字系统中具有重要的实际意义,其中最大允许的逻辑延迟将取决于同步时钟的周期抖动。
通过考虑P个连续时钟周期的持续时间与其理想值\(PT_0\)的偏差,可以很容易地扩展周期抖动的概念:
可以将其称为P周期抖动,\(J(P)_k\)可以理解为通过绝对噪声序列\(\tau_k\)输入\((z^P-1)\)离散时间滤波器来获取。因此,其方差可以看作是相位噪声的积分被一个\((z^P-1)\)滤波器滤波:
周期抖动是P周期抖动在\(P=1\)时的特殊情况,测量不同P值的\(\sigma_{J(P)}\)在实验中很容易完成,并且由于\((8.3.21)\)中对不同P值应用了不同形状的滤波器,可以揭示有关相位噪声频谱特性的大量信息。
抖动的另一种测量是通过观察每个周期的持续时间与下一个周期之间的差异来获得的:
所谓的相邻周期抖动,有时也称为周期间抖动,数学上可以通过将\(J_k\)输入\((z-1)\)离散时间滤波器来获取,或者等效的将绝对噪声序列\(\tau_k\)输入\((z-1)^2\)离散时间滤波器来获取,因此其通过下面的积分与相位噪声关联:
例题4:
例题1中的带有白噪声的正弦信号的周期抖动的均方根为?
解答:
同样,假设噪声远小于振荡幅度,\(\sigma_n<<A\),在例题1中我们分析了绝对抖动也是百兆,因此相位噪声恒定。结合\((8.3.5)\)和\((8.3.10)\),有:
应用\((8.3.19)\)可以得到周期噪声的方差:
均方根为上面式子的平方根。
例题5:
时钟的过零点由频率\(f_m\)的正弦扰动调制,即:
求绝对抖动,周期抖动和相邻抖动的均方根。
解答:
相位噪声\(S^2_{\phi}(f)\)在\(f_m\)处具有离散的频谱音调:
相位噪声谱中的离散音调称为杂散,因为在\(S_{\phi}^2(f)\)对\(f\)的图上,它们表现为垂直尖峰。使用\((8.3.10)\)中的积分很容易计算出绝对抖动:
周期抖动因积分\((8.3.19)\)中的额外项而略有减少,因为从一个跃迁到下一个跃迁的绝对抖动变化小于它偏离的总范围:
请注意,如果相位调制很慢(即\(f_mT_0<<1\)),则周期抖动很小,因为从一个周期到下一个周期的变化很小。相邻周期抖动也是如此:
相位噪声是振荡波形相位的频谱表示,但在实践中很难观察到,因为它需要完美的时间参考。观察振荡波形本身的频谱要容易得多。我们首先分析时钟波形的功率谱密度(例如例题2中的\(v(t)\))\(S_v(f)\)。
显然,它将集中在振荡频率\(\omega_0\)附近,有时称为载波频率。如果是一个周期没有变化的纯正弦曲线(因此,没有抖动),其显然将只在\(1/T_0\)处有一个音调。然而,实际信号将在载波周围的频率范围内具有功率,如下图所示:
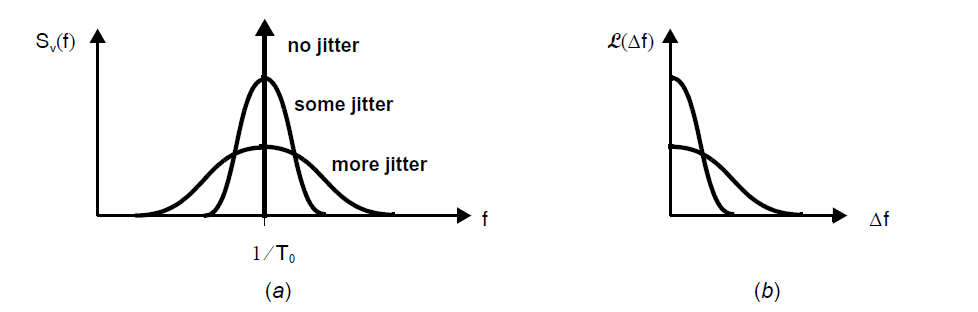
抖动较大的信号在\(S_{v}(f)\)的尾部将具有更大的功率。然而,那些尾部的力量也是与振荡波形的平方幅度成正比。因此,为了获得抖动\(S_v(f)\)的度量,可以根据信号中的总功率进行归一化,对于正弦波,该功率为\(A^2/2\) 。将结果频谱下移至直流可提供以下抖动的替代频谱表示:
\(\mathcal{L}(\Delta f)\)的单位是 \(Hz^{-1}\),但最常见的是以\(dBc/Hz\)为单位绘制其对数\(10log_{10}(\mathcal{L}(\Delta f))\)。参数\(\Delta f\)被称为偏移频率,表示与载波的频率偏移\(\Delta f\)处的信号频谱。
严格来说,\(\mathcal{L}(\Delta f)\)和\(S_{\phi}(f)\)之间的关系非常复杂,但以下简单近似可以应用于\(S_{\phi}(f)\)非常小处的频谱分量:
上面公式中2的因数之所以出现,是因为\((8.3.31)\)中对\(\mathcal{L}(\Delta f)\)的定义忽略了\(S_v(f)\)的一边带。我们将看到,如上图中表示的那样,实际振荡器在较小的失调频率下总是具有非常大的相位噪声。因此,\((8.3.32)\)仅适用于大偏移频率。结合\((8.3.31)\)和\((8.3.32)\)使得设计者可以仅通过观察频谱来估计信号的相位噪声。由于这种相等性,相位噪声图通常也以单位对数表示标记为\(dBc/Hz\),此处\(c\)表示\(\mathcal{L}(\Delta f)\)已对“载波”中的总功率进行归一化,尽管它的单位写得更准确的话应该是\(10log_{10}(rad^2/Hz)\)。
在设计数字系统时,关键路径的延迟必须短于最小可能的时钟周期。因此,\(\tau_k\)的概率密度函数(PDF)及其导数也是时钟纯度的重要度量。请注意,抖动的频谱表示通常不能用于估计\(\tau_k\)的PDF。
例题6:
求有方差为\(\sigma_n^2\)的加性白高斯噪声\(n(t)\),幅度为\(A\),角频率为\(\omega_0\)的正弦信号的 PDF。
解答:
正弦信号可以描述为:
在例题1中,假定了噪声远小于振荡幅度\(\sigma_n<<A\),绝对抖动与其零点附近的正弦斜率呈线性关系:
由于\(n_k\)是高斯分布的,因此绝对抖动也是高斯分布的,PDF如下:
其中\(\sigma_{\tau}\)由\((8.3.5)\)给出。
如果绝对抖动\(\tau_k\)具有高斯分布,则周期抖动、P 周期抖动和相邻周期抖动也是高斯分布的,因为根据\((8.3.18)\),\((8.3.20)\),\((8.3.22)\),它们是\(\tau_k\)的线性导数。
例题7:
需要驱动时钟周期始终至少为\(1 ns\)的数字系统。时钟有一个标称值周期\(T_0=1.1ns\)和高斯抖动分布。如果均方根周期抖动为\(5ps\),则概率是多少特定时钟周期小于\(1ns\)?
解答:
每当周期抖动\(J_k<-0.1ns\)时,时钟周期将小于\(1 ns\)。\(J_k\)的PDF是:
因此,时钟周期小于 \(1 ns\) 的概率由\(f_J(t)\)从\(-\infin\)到\(-100ps\)的积分给出:
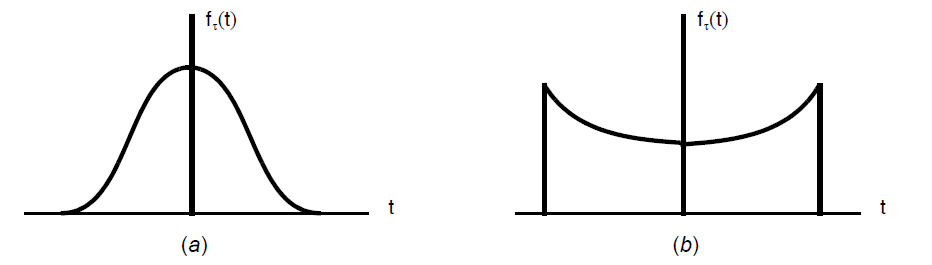
当由于随机噪声而产生抖动时,高斯分布很常见。这是因为噪声过程通常是许多独立噪声事件的叠加,因此大数定律倾向于使产生的抖动具有近似高斯分布。然而,当外部干扰是主要因素时,会出现其他抖动分布。
例如,下图将高斯抖动分布与在正弦相位调制下观察到的抖动 PDF 进行了比较。在实践中,电源电压的局部变化、数字数据模式和来自相邻信号的电磁干扰通常叠加在随机电路噪声上,以产生复杂的PDF。然后,测量设备可能能够将观察到的抖动PDF分解为其组成部分,从而为潜在的抖动源提供线索。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号