模拟集成电路设计系列博客——8.2.3 振荡器的相位噪声
8.2.3 振荡器的相位噪声
振荡器的相位噪声是一个基本特征。因为不存在一个无损失的振荡器(那就是永动机了),任何振荡器都需要一些有源电路来维持振荡,而这些有源电路会引入噪声。具体哪个器件引入了噪声的机理很微妙,到了后来才逐渐变得易于理解。但是,相位噪声的现象学事实是公认的,并且足以作为集成电路振荡器和PLL的基本认知。
集成电路振荡器的相位噪声可以用下面的公式来建模:
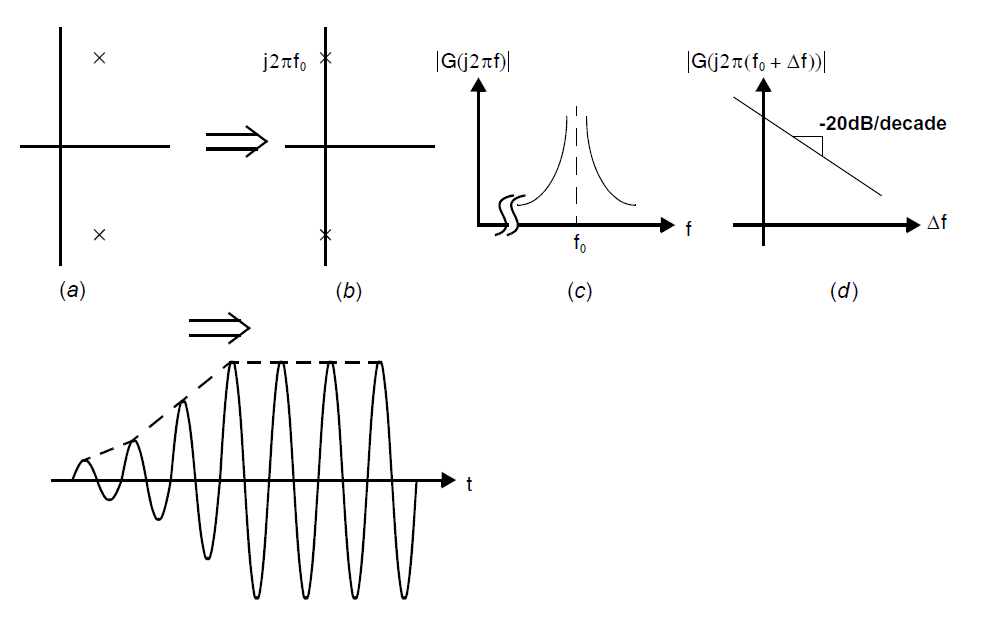
尽管从\((8.2.9)\)中严格推导出为什么包含这三项很困难,但是它们的存在可以通过简单的讨论理解。对环形振荡器和LC振荡器的小信号分析基本上揭示了其极点位于右半平面,如下图中(a)所示,因此其因此其冲激响应为一个指数发散曲线。这些振荡器的幅度最终会饱和。尽管饱和是一个非线性行为,但这个结果类似一个线性系统中极点恰好处于虚轴上的状态,如下图中(b)所示:振荡器保持固定幅度振荡。线性模型的频率响应为\(G(j2\pi(f_0)+\Delta f)\),小频率偏移\(\Delta f\)大致恒定,极点项除外。
振荡器内的噪声通过\(|G(j2\pi(f_0)+\Delta f)|^2\)整形,根据\((8.2.10)\)其与\(1/\Delta f^2\)成正比。我们将\(1/\Delta f^2\)噪声整形记为\(\mathcal{L}(\Delta f)\),在实践中可以在噪声频谱中观察到这个整形,如下图所示。
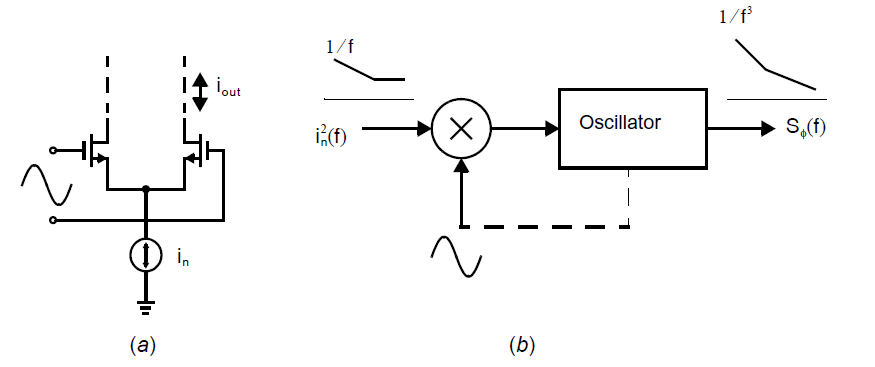
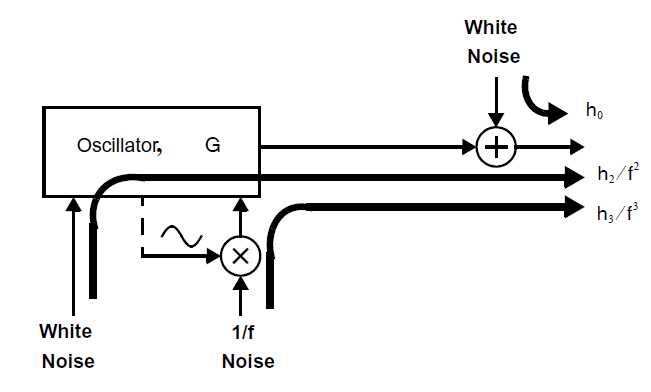
因此,振荡器闭环反馈回路中的噪声被振荡器的响应整形导致了\((8.2.9)\)中的\(h_2/f^2\)。一些一些噪声源在振荡器中开关,导致了其噪声频谱密度在被振荡器响应整形之前上变频。下图展示了一个典型的例子,噪声被一个有着振荡输入的差分对的尾电流源引入。闪烁噪声因此发生了上变频,导致被闭环振荡器响应的整形后产生了\((8.2.9)\)中的\(h_3/f^3\)项。叠加在正弦曲线上的加性白噪声会产生白相位噪声。当白噪声被引入振荡器(例如通过缓冲器)后会发生的情况,产生的相位白噪声可以通过\((8.2.9)\)中的\(h_0\)来建模。
上述三种噪声的来源可以见下图:
\((8.2.9)\)中的相位噪声的对数曲线如下图所示:
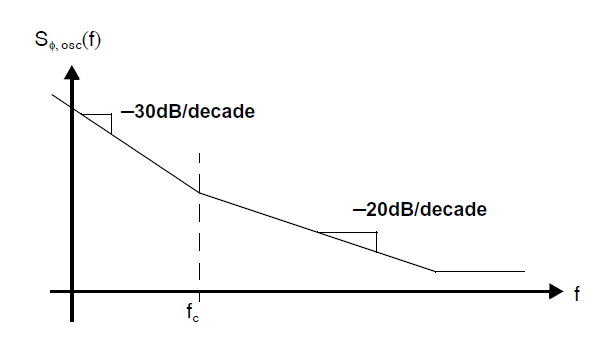
角频率\(f_c\)标记了\(1/f^2\)决定的区域到\(1/f^3\)的区域的转折点,\(f_c\)由这两项对\(S_{\phi}\)贡献相同的频率点决定:
一个潜在的应用\((8.2.9)\)做相位噪声建模的麻烦是,闭环噪声项\(1/f^2\)和\(1/f^3\)导致不同的噪声源开始分离。这些具体的噪声我们会在下一章节介绍。由于一个振荡器的绝对抖动确实会发生分离,\((8.2.9)\)的简单相位噪声模型公式在非常小偏移频率\(f\)时是不精确的。问题在于将相位噪声定义为\(\phi_k\)的噪声频谱密度严格的仅仅在相位是平稳随机过程时才能有效。但实际上相位并不是平稳随机过程[Gardner, 2005]。在通过长周期时间的观察(以秒为单位)这种非静态会导致分析问题,所以在只有几赫兹时一般不会考虑相位噪声。在超过这个限制之后,\((8.2.9)\)的相位噪声模型是可靠二点,并且可以积分用于精确的估计抖动。
为了理解一个振荡器的绝对抖动的无界性,考虑P周期抖动在增大P时会发生的变化(P周期抖动指P个周期下实际相位与理想相位的误差)。如下图所示:
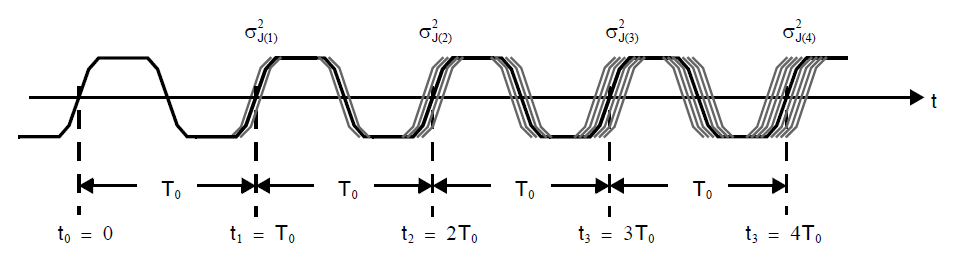
随着P的增大,振荡器第P次过零点时间的方差增大。从定性上讲,这是因为由于内部噪声导致的振荡器状态干扰持续存在,围绕其闭合反馈回路循环。因此,抖动成为过去所有时间的噪声贡献的叠加,并且无限制地增长。随着 P 的增加,积分中包含更多的低频相位噪声,因此产生的 P 周期抖动会增加。如下图所示[Liu, 2004]:
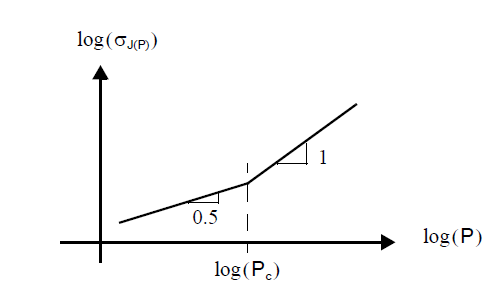
\(h_2/f^2\)的相位噪声分量导致 P 周期抖动与\(\sqrt{P}\)成正比增加,通过公式表达为:
一旦P变得足够大,低于\(f_c\)的频率就会产生显着影响。\(h_3/f^3\)项就会导致 P 周期抖动与\(P\)成正比例增长,两种行为之间的转换点为:
通过上图中的时域测量结果,\((8.2.12)\)和\((8.2.13)\)可以用于估算集成电路振荡器的相位噪声。
例题:
观察不同P在\(1.5 GHz\)下工作的VCO的P周期抖动,以获得如上图所示的曲线,得到\(P_c=30\)。10 个周期 (\(P=10\))的P周期抖动均方根为2.0ps。使用\((8.2.9)\)的模型估计VCO的相位噪声,但忽略白相噪声项,因为该项仅在非常高的频率下才重要。
解答:
将\(P=10\),\(\sigma_{J(10)}=2ps\)以及\(T_0=(1/1.5\cdot 10^9)\)代入\((8.2.12)\),可以得到\(h_2\approx 1350 rad^2\cdot Hz\)。使用\((8.2.13)\),代入\(P_c=30\)得到\(f_c\approx 2MHz\)。随后代入\((8.2.11)\)可以得到\(h_3 \approx 2.7\cdot 10^9 rad^2\cdot Hz^2\)。因此,VCO的相位噪声建模为:
