模拟集成电路设计系列博客——2.3 电流镜放大器
模拟集成电路设计 2.3 电流镜放大器
2.3 电流镜放大器
另一个在驱动片上容性负载时常用的放大器是电流镜放大器,其简化图如下所示:

通过使用高输出阻抗的合理的电流镜结构,能够使得整体增益变得相当可观。下图展示了一个电流镜放大器的细节结构:
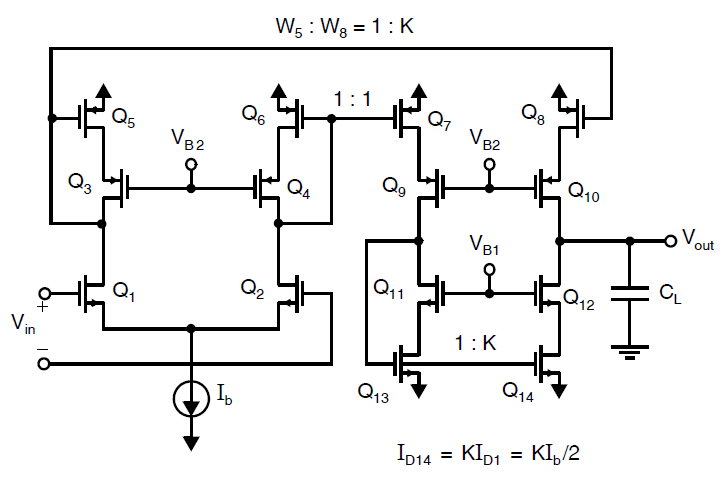
整体的传输函数可很近似于单极点系统,我们使用分析折叠Cascode放大器时相似的分析方法,有:
其中因子\(K\)是从输入晶体管到输出节点的电流镜的电流增益。因此该放大器的整体跨导为\(G_{ma}=Kg_{m1}\),通过\((2.3.1)\),我们可以解出放大器的单位增益频率(在没有反馈的情况下)为:
如果指定功耗的情况下,那么在给定电源电压的情况下,总电流:
将\((2.3.3)\)代入到\((2.3.2)\)中后,我们得到:
公式\((2.3.2)\)和\((2.3.4)\)都假定输入晶体管\(Q_1\)和\(Q_2\)满足平方律,并且需要将输入差分对偏置在极低的过驱动电压下。然而如果他们偏置在极低的过驱动电压下,那么他们的跨导会接近亚阈值区所规定的上界,即\(g_{m1(sub-th)}\approx qI_{D1}/nkT\),因此:
不论如何,放大器的跨导\(Kg_{m1}\)随着\(K\)的增大而增大,因此单位增益频率也会变得更大。这意味着单位增益频率主要是被负载电容所限制,而非任何内部节点引入的高频极点。在实践中\(K\)的上限一般在5。增大\(K\)同时也在\(I_{total}\)固定的情况下增大了增益,因为\(r_{out}\)基本上独立于\(K\)。
在上面展示的具体电路中,决定非主极点的重要节点首先为\(Q_1\)的漏极,其次为\(Q_2\)和\(Q_9\)的漏极。增大\(K\)可以增大这些节点的电容,同时也增大等效阻抗。作为结果,等效的第二极点移动到了更低的频率上。如果\(K\)增加的过多,那么第二极点频率就会接近\(\omega_{ta}\),从而导致需要增大\(C_L\)来降低\(\omega_{ta}\)来保证稳定性,除非\(\beta\)非常小。因此,当第二极点主导时,增大\(K\)会降低带宽,这一般在负载电容小的时候发生。如果对于速度有很高的要求的话,那么\(K\)需要取得尽可能小到接近于1,一般对一个通用的电流镜放大器来说\(K=2\)。
电流镜放大器的摆率可以通过假定有一个很大的输入电压的方式来求取。在这种情况下,所有的第一级偏置电流会流经\(Q_1\)或者\(Q_2\)。这个电流通过从输入级到输出级的电流增益来放大(例如\(K\))。因此,在摆率限制期间,总的对\(C_L\)进行充放电的电流为\(KI_b\),从而摆率为:
在给定功耗的情况下,摆率主要通过选择一个更大的\(K\)来进行增大。例如在\(K=4\)的情况下,摆率限制时,\(4/5\)的总电流将被用于对\(C_L\)进行充放电。这个结果使得电流镜放大器相比折叠Cascode放大器有着更优越的摆率,即使折叠Cascode放大器中使用了钳位晶体管。同时,对电流镜放大器来说,也不存在摆率限制期间晶体管上有大电压的问题。
总结来说,由于有更大的带宽和摆率,电流镜放大器相比折叠Cascode放大器更受欢迎,但是与折叠Cascode放大器相比,它受到热噪声的影响更大,因为它的输入晶体管偏置在更低的总电流比例的电流下导致跨导更小。而更小的跨导会导致在噪声回馈到放大器输入端时产生更大的热噪声。
例题:
假定本节所示的电流镜放大器,所有的晶体管长度都固定在\(0.4\mu m\),所有晶体管的宽度如下表所示。

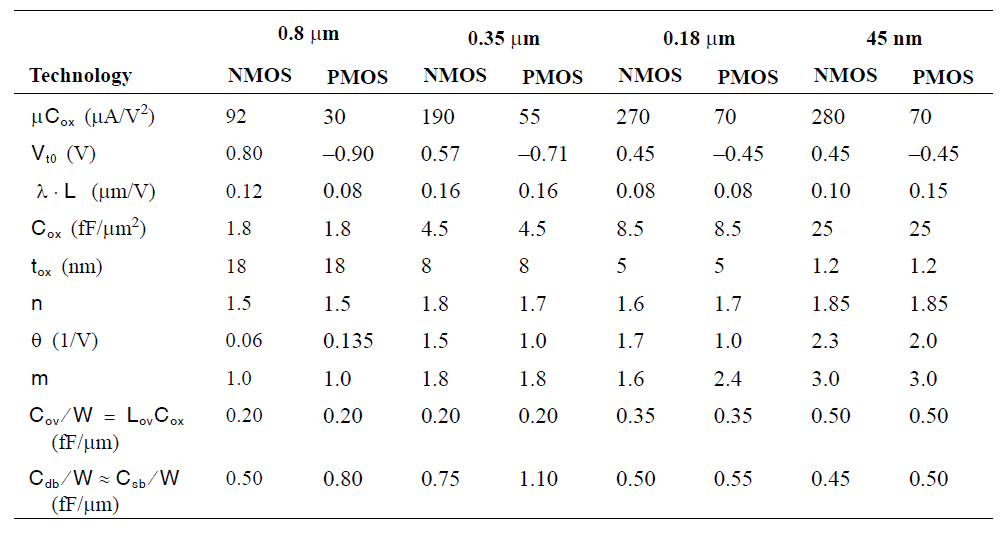
设\(K=2\),并且所有的工艺参数采用下表中\(0.18-\mu m\)的工艺,使用\(1.8V\)供电电压,放大器的总电流耗散为\(0.4mA\),负载电容为\(C_L=2.5pF\)。
请求出摆率以及单位增益频率,假定第二极点不主导的情况下,估算等效第二极点。是否有必要当没有使用超前补偿和\(\beta=1\)的情况下需要有一个\(75°\)的相位裕度增大\(C_L\)?如果使用超前补偿了呢?
解答:
由于总电流为\((3+K)I_b/2\),因此我们有:
因此,所有晶体管的偏置电流,除了输出级的,都是\(80\mu A\)。输出级晶体管的偏置电流两倍于输入级晶体管,为\(160\mu A\)。输入晶体管的过驱动电压被取在少于\(100mV\),因此他们的跨导接近于亚阈值区所限制的上限。
放大器的跨导又要放大\(K\)倍,因此最后总的跨导是\(4mA/V\)。放大器的单位增益频率为:
这和之前章节里例题中的折叠Cascode放大器在相同的总电流耗散和负载电容的情况下得到的结果一致。如果使用更大的\(K\)的话,那么电流镜放大器可以提供更高的带宽。
接着,摆率为:
相比没有钳位晶体管的折叠Cascode放大器的\(80V/\mu s\)高很多,且比加了钳位晶体管的折叠Cascode放大器的摆率仍然略高。
在估算等效第二极点时,为了简化问题会忽略注入区电容。在实际情况中,输入晶体管的漏极衬底电容会成为一个重要的因子,可以用仿真的方式来确认。主极点基本上肯定会出现在\(Q_1\)的漏极。这个节点上的阻抗为:
此外,节点电容主要为\(Q_5\)和\(Q_8\)的栅源电容,因此我们有:
从而有:
有了这些阻抗的值,我们就可以求出节点的时间常数:
用类似的方法,我们可以计算出\(Q_2\)漏极的阻抗与时间常数为\(R_2=1.3k\Omega\),\(C_2=0.091pF\),\(\tau_2=R_2C_2=0.12ns\)。另一个重要的时间常数来自于\(Q_9\)漏极的寄生电容,此处我们有:
以及:
从而得到\(\tau_3=0.04ns\),总的等效第二极点的时间常数就可以估算为:
从而可以得到第二极点的频率约为:
如果不使用超前补偿,并且需要75°的相位裕度,那么单位增益频率需要为等效第二极点的0.27倍。具体来说,单位增益频率必须小于\(126MHz\)。为了取得这个单位增益频率,我们需要增大\(C_L\)到\(255MHz/126MHz\)倍数,这会使得\(C_L\)增大到\(5pF\)。
如果使用超前补偿,那么单位增益频率在超前电阻加入之前设置在一个只有55°相位裕度的地方。这个方式允许单位增益频率达到第二极点的0.7倍,远大于没有超前补偿的情况。超前补偿的好处非常显著,单位增益频率提升了150%,同时并不需要补偿电容,从而减小了电路的面积。
最后一提,注意到从\(Q_2\)漏极穿到输出的信号路径上的延迟\((\tau_2+\tau_3=0.16ns)\)大约与\(Q_1\)漏极到输出的延迟相等(\(\tau_1 = 0.18ns\))。这两者近似相等有助于减小由两条信号路径引入的高频(大概在第二极点频率附近)零极点对带来的有害效应。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号