SystemVerilog for Design Edition 2 Chapter 2 SystemVerilog Declaration Spaces
SystemVerilog for Design Edition 2 Chapter 2
SystemVerilog Declaration Spaces
Verilog only has limited places in which designers can declare variables and other design information. SystemVerilog extends
Verilog’s declaration spaces in several ways. These extensions make it much easier to model complex design data, and reduce the
risk of hard-to-find coding errors. SystemVerilog also enhances how simulation time units are defined.
The topics discussed in this chapter include:
• Packages definitions and importing definitions from packages
• $unit compilation declaration space
• Declarations in unnamed blocks
• Enhanced time unit definitions
Before examining in detail the many new data types that System-Verilog offers, it is important to know where designers can define important information that is used in a design. To illustrate these new declaration spaces, this chapter will use several SystemVerilog data types that are not discussed until the following chapters. In brief, some of the new types used in this chapter are:
logic — a 1-bit 4-state variable, like the Verilog reg type; can be declared as any vector size (discussed in Chapter 3).
enum — an enumerated net or variable with a labeled set of values; similar to the C enum type, but with additional syntax and
semantics for modeling hardware (discussed in Chapter 4).
typedef — a user-defined data type, constructed from built-in types or other user-defined types, similar to the C typedef (discussed in Chapter 4).
struct — a collection of variables that can be referred to individually or collectively, similar to the C struct type (discussed in
Chapter 5).
2.1 Packages
Verilog requires local declarations:
In Verilog, declarations of variables, nets, tasks and functions must be declared within a module, between the module...endmodule keywords. The objects declared within a module are local to the module. For modeling purposes, these objects should be referenced within the module in which they are declared. Verilog also allows hierarchical references to these objects from other modules for verification purposes, but these cross-module references do not represent hardware behavior, and are not synthesizable. Verilog also allows local variables to be defined in named blocks (formed with begin...end or fork...join), tasks and functions. These declarations are still defined within a module, however, and, for synthesis purposes, only accessible within the module.
Verilog does not have a place to make global declarations, such as global functions. A declaration that is used in multiple design
blocks must be declared in each block. This not only requires redundant declarations, but it can also lead to errors if a declaration, such as a function, is changed in one design block, but not in another design block that is supposed to have the same function. Many designers use include files and other coding tricks to work around this shortcoming, but that, too, can lead to coding errors and design maintenance problems.
2.1.1 Package definitions
SystemVerilog adds user-defined types to Verilog
SystemVerilog adds user-defined types, using typedef. It is often desirable to use the definition of user-defined types in multiple modules. Using Verilog rules, where declarations are always local to a module, it would be necessary to duplicate a user-defined type definition in each and every module in which the definition is used. Redundant local definitions would not be desirable for user-defined types.
To enable sharing a user-defined type definition across multiple modules, SystemVerilog adds packages to the Verilog language.
The concept of packages is leveraged from the VHDL language. SystemVerilog packages are defined between the keywords package and endpackage. The synthesizable constructs that a packages can contain are:
• parameter and localparam constant definitions
• const variable definitions
• typedef user-defined types
• Fully automatic task and function definitions
• import statements from other packages
• Operator overload definitions
Packages can also contain global variable declarations, static task definitions and static function definitions. These are not synthesizable, however, and are not covered in this book. A package is a separate declaration space. It is not embedded within
a Verilog module. A simple example of a package definition is:
Example 2-1: A package definition
package definitions;
parameter VERSION = "1.1";
typedef enum {ADD, SUB, MUL} opcodes_t;
typedef struct {
logic [31:0] a, b;
opcodes_t opcode;
} instruction_t;
function automatic [31:0] multiplier (input [31:0] a, b);
// code for a custom 32-bit multiplier goes here
return a * b; // abstract multiplier (no error detection)
endfunction
endpackage
Packages can contain parameter, localparam and const constant declarations. The parameter and localparam constants are Verilog constructs. A const constant is a SystemVerilog constant, which is discussed in section 3.10 on page 71. In Verilog, a parameter constant can be redefined for each instance of a module, whereas a localparam cannot be directly redefined. In a package, however, a parameter constant cannot be redefined, since it is not part of a module instance. In a package, parameter and localparam are synonymous.
2.1.2 Referencing package contents
Referencing package contents Modules and interfaces can reference the definitions and declarations in a package four ways:
• Direct reference using a scope resolution operator
• Import specific package items into the module or interface
• Wildcard import package items into the module or interface
• Import package items into the $unit declaration space
The first three methods are discussed in this section. Importing into $unit is discussed later in this chapter, in section 2.2 on page 14.
:: is used to reference items in packages
SystemVerilog adds a :: “scope resolution operator” to Verilog. This operator allows directly referencing a package by the package
name, and then selecting a specific definition or declaration within the package. The package name and package item name are separated by double colons ( :: ). For example, a SystemVerilog module port can be defined as an instruction_t type, where
instruction_t is defined in the package definitions, illustrated in example 2-1 on page 9.
Example 2-2: Explicit package references using the :: scope resolution operator
module ALU
(input definitions::instruction_t IW,
input logic clock,
output logic [31:0] result
);
always_ff @(posedge clock) begin
case (IW.opcode)
definitions::ADD : result = IW.a + IW.b;
definitions::SUB : result = IW.a - IW.b;
definitions::MUL : result = definitions::multiplier(IW.a, IW.b);
endcase
end
endmodule
Explicit package reference help document source code
Explicitly referencing package contents can help to document the design source code. In example 2-2, above, the use of the package name makes it is very obvious where the definitions for instruction_t, ADD, SUB, MUL and multiplier can be found.
However, when a package item, or items, needs to be referenced many times in a module, explicitly referencing the package name each time may be too verbose. In this case, it may be desirable to import package items into the design block.
import statements make package items visible locally
SystemVerilog allows specific package items to be imported into a module, using an import statement. When a package definition or declaration is imported into a module or interface, that item becomes visible within the module or interface, as if it were a locally defined name within that module or interface. It is no longer necessary to explicitly reference the package name each time that package item is referenced. Importing a package definition or declaration can simplify the code within a module. Example 2-2 is modified below as example 2-3, using import statements to make the enumerated type labels local names within the module. The case statement can then reference these names without having to explicitly name the package each time.
Example 2-3: Importing specific package items into a module
module ALU
(input definitions::instruction_t IW,
input logic clock,
output logic [31:0] result
);
import definitions::ADD;
import definitions::SUB;
import definitions::MUL;
import definitions::multiplier;
always_comb begin
case (IW.opcode)
ADD : result = IW.a + IW.b;
SUB : result = IW.a - IW.b;
MUL : result = multiplier(IW.a, IW.b);
endcase
end
endmodule
note: Importing an enumerated type definition does not import the labels used within that definition.
enumerated labels must be imported in order to reference locally
In example 2-3, above, the following import statement would not work:
import definitions::opcode_t;
This import statement would make the user-defined type, opcode_t, visible in the module. However, it would not make the enumerated labels used within opcode_t visible. Each enumerated label must be explicitly imported, in order for the labels to become visible as local names within the module. When there are many items to import from a package, using a wildcard import may be more practical.
all items in a package can be made visible using a wildcard
SystemVerilog allows package items to be imported using a wildcard, instead of naming specific package items. The wildcard token is an asterisk ( * ). For example:
import definitions::*; // wildcard import
note: A wildcard import does not automatically import all package contents.
When package items are imported using a wildcard, only items actually used in the module or interface are actually imported. Definitions and declarations in the package that are not referenced are not imported.
Local definitions and declarations within a module or interface take precedence over a wildcard import. An import that specifically names package items also takes precedence over a wildcard import. From a designer’s point of view, a wildcard import simply adds the package to the search rules for an identifier. Software tools will search for local declarations first (following Verilog search rules for within a module), and then search in any packages that were imported using a wildcard. Finally, tools will search in SystemVerilog’s $unit declaration space. The $unit space is discussed in section 2.2 on page 14 of this chapter.
Example 2-4, below, uses a wildcard import statement. This effectively adds the package to the identifier search path. When the case statement references the enumerated labels of ADD, SUB, and MUL, as well as the function multiplier, it will find the definitions of these names in the definitions package.
Example 2-4: Using a package wildcard import
module ALU
(input definitions::instruction_t IW,
input logic clock,
output logic [31:0] result
);
import definitions::*; // wildcard import
always_comb begin
case (IW.opcode)
ADD : result = IW.a + IW.b;
SUB : result = IW.a - IW.b;
MUL : result = multiplier(IW.a, IW.b);
endcase
end
endmodule
In examples 2-3, and 2-4, for the IW module port, the package name must still be explicitly referenced. It is not possible to add an
import statement between the module keyword and the module port definitions. There is a way to avoid having to explicitly reference the package name in a port list, however, using the $unit declaration space. The $unit space is discussed in 2.2.
2.1.3 Synthesis guidelines
for synthesis, package tasks and functions must be automatic
When a module references a task or function that is defined in a package, synthesis will duplicate the task or function functionality and treat it as if it had been defined within the module. To be synthesizable, tasks and functions defined in a package must be declared as automatic, and cannot contain static variables. This is because storage for an automatic task or function is effectively allocated each time it is called. Thus, each module that references an automatic task or function in a package sees a unique copy of the task or function storage that is not shared by any other module. This ensures that the simulation behavior of the pre-synthesis reference to the package task or function will be the same as post-synthesis
behavior, where the functionality of the task or function has been implemented within one or more modules.
For similar reasons, synthesis does not support variables declarations in packages. In simulation, a package variable will be shared by all modules that import the variable. One module can write to the variable, and another module will see the new value. This type of inter-module communication without passing values through module ports is not synthesizable.
2.2 $unit compilation-unit declarations
$unit compilation-unit declarations
SystemVerilog has compilation units
SystemVerilog adds a concept called a compilation unit to Verilog. A compilation unit is all source files that are compiled at the same time. Compilation units provide a means for software tools to separately compile sub-blocks of an overall design. A sub-block might comprise a single module or multiple modules. The modules might be contained in a single file or in multiple files. A sub-block of a design might also contain interface blocks (presented in Chapter and testbench program blocks (covered in the companion book, SystemVerilog for Verification1).
SystemVerilog extends Verilog’s declaration space by allowing declarations to be made outside of package, module, interface and
program block boundaries. These external declarations are in a compilation-unit scope, and are visible to all modules that are compiled at the same time.
The compilation-unit scope can contain:
• Time unit and precision declarations (see 2.4 on page 28)
• Variable declarations
• Net declarations
• Constant declarations
• User-defined data types, using typedef, enum or class
• Task and function definitions
The following example illustrates external declarations of a constant, a variable, a user-defined type, and a function.
Example 2-5: External declarations in the compilation-unit scope (not synthesizable)
/******************* External declarations *******************/
parameter VERSION = "1.2a"; // external constant
reg resetN = 1; // external variable (active low)
typedef struct packed { // external user-defined type
reg [31:0] address;
reg [31:0] data;
reg [ 7:0] opcode;
} instruction_word_t;
function automatic int log2 (input int n); // external function
if (n <=1) return(1);
log2 = 0;
while (n > 1) begin
n = n/2;
log2++;
end
return(log2);
endfunction
/********************* module definition *********************/
// external declaration is used to define port types
module register (output instruction_word_t q,
input instruction_word_t d,
input wire clock );
always @(posedge clock, negedge resetN)
if (!resetN) q <= 0; // use external reset
else q <= d;
endmodule
External compilation-unit scope declarations are not global
A declaration in the compilation-unit scope is not the same as a global declaration. A true global declaration, such as a global variable or function, would be shared by all modules that make up a design, regardless of whether or not source files are compiled separately or at the same time.
SystemVerilog’s compilation-scope only exists for source files that are compiled at the same time. Each time source files are compiled, a compilation-unit scope is created that is unique to just that compilation. For example, if module CPU and module controller both reference an externally declared variable called reset, then two possible scenarios exist:
• If the two modules are compiled at the same time, there will be a single compilation-unit scope. The externally declared reset
variable will be common to both modules.
• If each module were compiled separately, then there would be two compilation-unit scopes, possibly with two different reset
variables.
In the latter scenario, the compilation that included the external declaration of reset would appear to compile OK. The other file,
when compiled separately, would have its own, unique $unit compilation space, and would not see the declaration of reset from the previous compilation. Depending on the context of how reset is used, the second compilation might fail, due to an undeclared variable, or it might compile OK, making reset an implicit net. This is a dangerous possibility! If the second compilation succeeds by making reset an implicit net, there will now be two signals called reset, one in each compilation. The two different reset signals would not be connected in any way.
2.2.1 Coding guidelines
$unit should only be used for importing packages
- Do not make any declarations in the
$unitspace! All declarations should be made in named packages. - When necessary, packages can be imported into
$unit. This is useful when a module or interface contains multiple ports that are of user-defined types, and the type definitions are in a package. Directly declaring objects in the$unitcompilation-unit space can lead to design errors when files are compiled separately. It can also lead to spaghetti code if the declarations are scattered in multiple files that can be difficult to maintain, re-use, or to debug declaration errors.
2.2.2 SystemVerilog identifier search rules
the compilation-unit scope is third in the search order
Declarations in the compilation-unit scope can be referenced anywhere in the hierarchy of modules that are part of the compilation-unit.
SystemVerilog defines a simple and intuitive search rule for when referencing an identifier:
- First, search for local declarations, as defined in the IEEE 1364 Verilog standard.
- Second, search for declarations in packages which have been wildcard imported into the current scope.
- Third, search for declarations in the compilation-unit scope.
- Fourth, search for declarations within the design hierarchy, following IEEE 1364 Verilog search rules.
The SystemVerilog search rules ensure that SystemVerilog is fully backward compatible with Verilog.
2.2.3 Source code order
note: Data identifiers and type definitions must be declared before being referenced.
undeclared identifiers have an implicit net type
There is an important consideration when using external declarations. Verilog supports implicit type declarations, where, in specific contexts, an undeclared identifier is assumed to be a net type (typically a wire type). Verilog requires the type of identifiers to be explicitly declared before the identifier is referenced when the context will not infer an implicit type, or when a type other than the default net type is desired.
external declarations must be defined before use
This implicit type declaration rule affects the declaration of variables and nets in the compilation-unit scope. Software tools must encounter the external declaration before an identifier is referenced. If not, the name will be treated as an undeclared identifier, and follow the Verilog rules for implicit types.
The following example illustrates how source code order can affect the usage of a declaration external to the module. This example will not generate any type of compilation or elaboration error. For module parity_gen, software tools will automatically infer parity as an implicit net type local to the module, since the reference to parity comes before the external declaration for the signal. On the other hand, module parity_check comes after the external declaration of parity in the source code order. Therefore, the parity_check module will use the external variable declaration.
module parity_gen (input wire [63:0] data );
assign parity = ^data; // parity is an implicit local net
endmodule
reg parity; // external declaration is not
// used by module parity_gen
// because the declaration comes
// after it has been referenced
module parity_check (input wire [63:0] data,output logic err);
assign err = (^data != parity); // parity is the $unit variable
endmodule
2.2.4 Coding guidelines for importing packages into $unit
SystemVerilog allows module ports to be declared as user-defined types. The coding style recommended in this book is to place those definitions in one or more packages. Example 2-2 on page 10, listed earlier in this chapter, illustrates this usage of packages. An excerpt of this example is repeated below.
module ALU
(input definitions::instruction_t IW,
input logic clock,
output logic [31:0] result
);
Explicitly referencing the package as shown above can be tedious and redundant when many module ports are of user-defined types. An alternative style is to import a package into the $unit compilation-unit scope, prior to the module declaration. This makes the user-defined type definitions visible in the SystemVerilog search order. For example:
// import specific package items into $unit
import definitions::instruction_t;
module ALU
(input instruction_t IW,
input logic clock,
output logic [31:0] result
);
A package can also be imported into the $unit space using a wildcard import. Keep in mind that a wildcard import does not actually import all package items. It simply adds the package to the System-Verilog source path. The following code fragment illustrates this style.
// wildcard import package items into `$unit`
import definitions::*;
module ALU
(input instruction_t IW,
input logic clock,
output logic [31:0] result
);
The same care must be observed when importing packages into the $unit space as with making declarations and definitions in the $unit space. When using $unit, file order dependencies can be an issue, and multiple $units can be an issue.
file order compilation dependencies
When items are imported from a package (either with specific package item imports or with a wildcard import), the import statement must occur before the package items are referenced. If the package import statements are in a different file than the module or interface that references the package items, then the file with the import statements must be listed first in the file compilation order. If the file order is not correct, then the compilation of the module or interface will either fail, or will incorrectly infer implicit nets instead of seeing the package items.
multiple file compilation versus single file compilation
Synthesis compilers, lint checkers, some simulators, and possibly other tools that can read in Verilog and SystemVerilog source code can often compile one file at a time or multiple files at a time. When multiple files are compiled as single compilation, there is a single $unit space. An import of a package (either specific package items or a wildcard import) into $unit space makes the package items visible to all modules and interfaces read in after the import statement. However, if files are compiled separately, then there will be multiple separate $unit compilation units. A package import in one $unit will not be visible in another $unit.
using import statements in every file
A solution to both of these problems with importing package items into the $unit compilation-unit space is to place the import statements in every file, before the module or interface definition. This solution works great when each file is compiled separately. However, care must still be taken when multiple files are compiled as a single compilation. It is illegal to import the same package items more than once into the same $unit space (The same as it is illegal to declare the same variable name twice in the same name space).
conditional compilation with $unit package imports
A common C programming trick can be used to make it possible to import package items into the $unit space with both single file compilation and multiple file compilation. The trick is to use conditional compilation to include the import statements the first time the statements are compiled into $unit, and not include the statements if they are encountered again in the same compilation. In order to tell if the import statements have already been compiled in the current $unit space, a ‘define flag is set the first time the import statements are compiled.
In the following example, the definitions package is contained in a separate file, called definitions.pkg (Any file name and file extension could be used). After the endpackage keyword, the package is wildcard imported into the $unit compilation-unit space.
In this way, when the package is compiled, the definitions within the package are automatically made visible in the current $unit
space. Within the definitions.pkg file, a flag is set to indicate when this file has been compiled. Conditional compilation surrounds the entire file contents. If the flag has not been set, then the package will be compiled and imported into $unit. If the flag is already set (indicating the package has already been compiled and imported into the current $unit space), then the contents of the file are ignored.
Example 2-6: Package with conditional compilation (file name: definitions.pkg)
`ifndef DEFS_DONE // if the already-compiled flag is not set...
`define DEFS_DONE // set the flag
package definitions;
parameter VERSION = "1.1";
typedef enum {ADD, SUB, MUL} opcodes_t;
typedef struct {
logic [31:0] a, b;
opcodes_t opcode;
} instruction_t;
function automatic [31:0] multiplier (input [31:0] a, b);
// code for a custom 32-bit multiplier goes here
return a * b; // abstract multiplier (no error detection)
endfunction
endpackage
import definitions::*; // import package into `$unit`
`endif
The line: ‘include "definitions.pkg" should be placed at the beginning of every design or testbench file that needs the definitions in the package. When the design or testbench file is compiled, it will include in its compilation the package and import statement. The conditional compilation in the definitions. pkg file will ensure that if the package has not already been compiled and imported, it will be done. If the package has already been compiled and imported into the current $unit space, then the compilation of that file is skipped over.
note: For this coding style, the package file should be passed to the software tool compiler indirectly, using a ‘include compiler directive.
package compilation should be indirect, using ‘include
This conditional compilation style uses the Verilog ‘include directive to compile the definitions.pkg file as part of the compilation
of some other file. This is done in order to ensure that the import statement at the end of the definitions.pkg file will import the package into the same $unit space being used by the compilation of the design or testbench file. If the definitions. pkg file were to be passed to the software tool compiler directly on that tool’s command line, then the package and import statement could be compiled into a different $unit space than what the design or testbench block is using.
The file name for the example listed in 2-6 does not end with the common convention of .v (for Verilog source code files) or .sv (for SystemVerilog source code files). A file extension of .pkg was used to make it obvious that the file is not a design or testbench block, and therefore is not a file that should be listed on the simulator, synthesis compiler or other software tool command line. The .pkg extension is an arbitrary name used for this book. The extension could be other names, as well.
Examples 2-7 and 2-8 illustrate a design file and a testbench file that include the entire file in the current compilation. The items within the package are then conditionally included in the current $unit compilation-unit space using a wildcard import. This makes the package items visible throughout the module that follows, including in the module port lists. For this coding style, the package file should be passed to the software tool compiler indirectly, using a ‘include compiler directive.
Example 2-7: A design file that includes the conditionally-compiled package file
`include "definitions.pkg" // compile the package file
module ALU
(input instruction_t IW,
input logic clock,
output logic [31:0] result
);
always_comb begin
case (IW.opcode)
ADD : result = IW.a + IW.b;
SUB : result = IW.a - IW.b;
MUL : result = multiplier(IW.a, IW.b);
endcase
end
endmodule
Example 2-8: A testbench file that includes the conditionally-compiled package file
`include "definitions.pkg" // compile the package file
module test;
instruction_t test_word;
logic [31:0] alu_out;
logic clock = 0;
ALU dut (.IW(test_word), .result(alu_out), .clock(clock));
always #10 clock = ~clock;
initial begin
@(negedge clock)
test_word.a = 5;
test_word.b = 7;
test_word.opcode = ADD;
@(negedge clock)
$display("alu_out = %d (expected 12)", alu_out);
$finish;
end
endmodule
‘include works with both sinlge-file and multi-file compilation
In a single file compilation, the package will be compiled and imported into each $unit compilation-unit. This ensures that each
$unit sees the same package items. Since each $unit is unique, there will not be a name conflict from compiling the package more than once.
In a multiple file compilation, the conditional compilation ensures that the package is only compiled and imported once into the common $unit compilation space that is shared by all modules. Whichever design or testbench file is compiled first will import the package, ensuring that the package items are visible for all subsequent files.
note: The conditional compilation style shown in this section does not work with global variables, static tasks, and static functions.
package variables are shared variables (not synthesizable)
Packages can contain variable declarations. A package variable is shared by all design blocks (and test blocks) that import the variable. The behavior of package variables will be radically different between single file compilations and multiple file compilations. In multiple file compilations, the package is imported into a single $unit compilation space. Every design block or test block will see the same package variables. A value written to a package variable by one block will be visible to all other blocks. In single file compilations, each $unit space will have a unique variable that happens to have the same name as a variable in a different $unit space. Values written to a package variable by one design or test block will not be visible to other design or test blocks.
static tasks and functions in packages are not synthesizable
Static tasks and functions, or automatic tasks and functions with static storage, have the same potential problem. In multiple file
compilations, there is a single $unit space, which will import one instance of the task or function. The static storage within the task or function is visible to all design and verification blocks. In single file compilations, each separate $unit will import a unique instance of the task or function. The static storage of the task or function will not be shared between design and test blocks.
This limitation on conditionally compiling import statements into $unit should not be a problem in models that are written for synthesis, because synthesis does not support variable declarations in packages, or static tasks and functions in packages (see section 2.1.3 on page 14).
2.2.5 Synthesis guidelines
The synthesizable constructs that can be declared within the compilation-unit scope (external to all module and interface definitions) are:
• typedef user-defined type definitions
• Automatic functions
• Automatic tasks
• parameter and localparam constants
• Package imports
using packages instead of $unit is a better coding style
While not a recommended style, user-defined types defined in the compilation-unit scope are synthesizable. A better style is to place the definitions of user-defined types in named packages. Using packages reduces the risk of spaghetti code and file order dependencies.
external tasks and functions must be automatic
Declarations of tasks and functions in the $unit compilation-unit space is also not a recommended coding style. However, tasks and functions defined in $unit are synthesizable. When a module references a task or function that is defined in the compilation-unit scope, synthesis will duplicate the task or function code and treat it as if it had been defined within the module. To be synthesizable, tasks and functions defined in the compilation-unit scope must be declared as automatic, and cannot contain static variables. This is because storage for an automatic task or function is effectively allocated each time it is called. Thus, each module that references an automatic task or function in the compilation-unit scope sees a unique copy of the task or function storage that is not shared by any other module. This ensures that the simulation behavior of the presynthesis reference to the compilation-unit scope task or function will be the same as post-synthesis behavior, where the functionality of the task or function has been implemented within the module.
A parameter constant defined within the compilation-unit scope cannot be redefined, since it is not part of a module instance. Synthesis treats constants declared in the compilation-unit scope as literal values. Declaring parameters in the $unit space is not a good modeling style, as the constants will not be visible to modules that are compiled separately from the file that contains the constant declarations.
2.3 Declarations in unnamed statement blocks
local variables in named blocks
Verilog allows local variables to be declared in named begin...end or fork...join blocks. A common usage of local variable declarations is to declare a temporary variable for controlling a loop. The local variable prevents the inadvertent access to a variable at the module level of the same name, but with a different usage. The following code fragment has declarations for two variables, both named i. The for loop in the named begin block will use the local variable i that is declared in that named block, and not touch the variable named i declared at the module level.
module chip (input clock);
integer i; // declaration at module level
always @(posedge clock)
begin: loop // named block
integer i; // local variable
for (i=0; i<=127; i=i+1) begin
...
end
end
endmodule
hierarchical references to local variables
A variable declared in a named block can be referenced with a hierarchical path name that includes the name of the block. Typically, only a testbench or other verification routine would reference a variable using a hierarchical path. Hierarchical references are not synthesizable, and do not represent hardware behavior. The hierarchy path to the variable within the named block can also be used by VCD (Value Change Dump) files, proprietary waveform displays, or other debug tools, in order to reference the locally declared variable. The following testbench fragment uses hierarchy paths to print the value of both the variables named i in the preceding example:
module test;
reg clock;
chip chip (.clock(clock));
always #5 clock = ~clock;
initial begin
clock = 0;
repeat (5) @(negedge clock) ;
$display("chip.i = %0d", chip.i);
$display("chip.loop.i = %0d", chip.loop.i);
$finish;
end
endmodule
2.3.1 Local variables in unnamed blocks
local variables in unnamed blocks
SystemVerilog extends Verilog to allow local variables to be declared in unnamed blocks. The syntax is identical to declarations
in named blocks, as illustrated below:
module chip (input clock);
integer i; // declaration at module level
always @(posedge clock)
begin // unnamed block
integer i; // local variable
for (i=0; i<=127; i=i+1) begin
...
end
end
endmodule
local variables in unnamed blocks have no hierarchy path
Since there is no name to the block, local variables in an unnamed block cannot be referenced hierarchically. A testbench or a VCD file cannot reference the local variable, because there is no hierarchy path to the variable.
named blocks protect local variables
Declaring variables in unnamed blocks can serve as a means of protecting the local variables from external, cross-module references. Without a hierarchy path, the local variable cannot be referenced from anywhere outside of the local scope.
inferred hierarchy paths fro debugging
This extension of allowing a variable to be declared in an unnamed scope is not unique to SystemVerilog. The Verilog language has a similar situation. User-defined primitives (UDPs) can have a variable declared internally, but the Verilog language does not require that an instance name be assigned to primitive instances. This also creates a variable in an unnamed scope. Software tools will infer an instance name in this situation, in order to allow the variable within the UDP to be referenced in the tool’s debug utilities. Software tools may also assign an inferred name to an unnamed block, in order to allow the tool’s waveform display or debug utilities to reference the local variables in that unnamed block. The SystemVerilog standard neither requires nor prohibits a tool inferring a scope name for unnamed blocks, just as the Verilog standard neither requires nor prohibits the inference of instance names for unnamed primitive instances.
Section 7.7 on page 192 also discusses named blocks; and section 7.8 on page 194 introduces statement names, which can also be used to provide a scope name for local variables.
2.4 Simulation time units and precision
The Verilog language does not specify time units as part of time values. Time values are simply relative to each other. A delay of 3
is larger than a delay of 1, and smaller than a delay of 10. Without time units, the following statement, a simple clock oscillator that might be used in a testbench, is somewhat ambiguous:
forever #5 clock = ~clock;
What is the period of this clock? Is it 10 picoseconds? 10 nanoseconds? 10 milliseconds? There is no information in the statement
itself to answer this question. One must look elsewhere in the Verilog source code to determine what units of time the #5 represents.
2.4.1 Verilog’s timescale directive
Verilog specifies time units to the software tool
Instead of specifying the units of time with the time value, Verilog specifies time units as a command to the software tool, using a
`timescale compiler directive. This directive has two components: the time units, and the time precision to be used. The precision
component tells the software tool how many decimal places of accuracy to use.
In the following example,
‘timescale 1ns / 10ps
the software tool is instructed to use time units of 1 nanosecond, and a precision of 10 picoseconds, which is 2 decimal places, relative to 1 nanosecond.
multiple ‘timescale directives
The ‘timescale directive can be defined in none, one or more Verilog source files. Directives with different values can be specified
for different regions of a design. When this occurs, the software tool must resolve the differences by finding a common denominator in all the time units specified, and then scaling all the delays in each region of the design to the common denominator.
the ‘timescale directive is file order dependent
A problem with the ‘timescale directive is that the command is not bound to specific modules, or to specific files. The directive is a
command to the software tool, and remains in effect until a new ‘timescale command is encountered. This creates a dependency
on which order the Verilog source files are read by the software tool. Source files without a ‘timescale directive are dependent on the order in which the file is read relative to previous files.
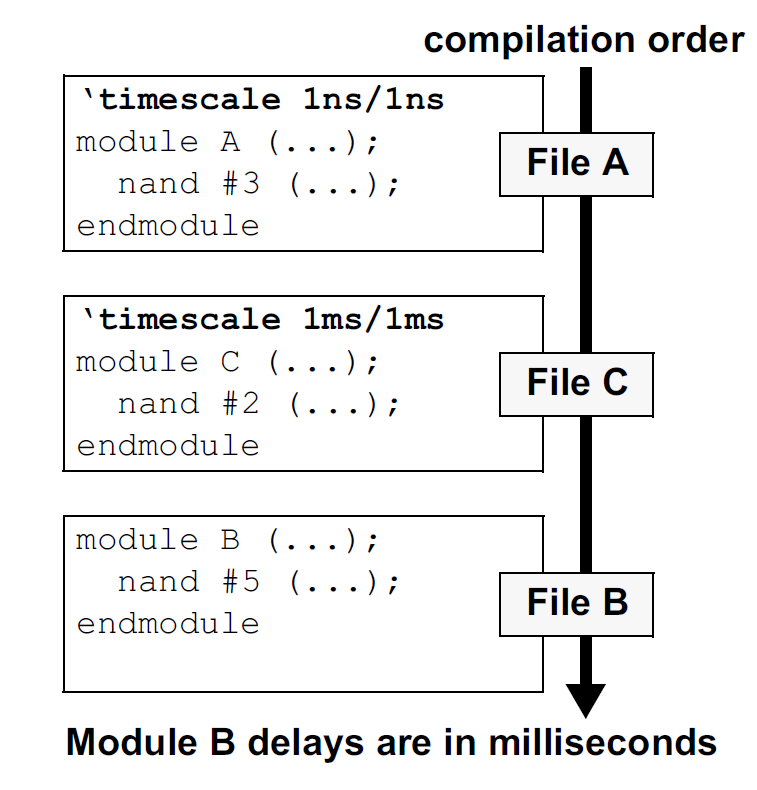
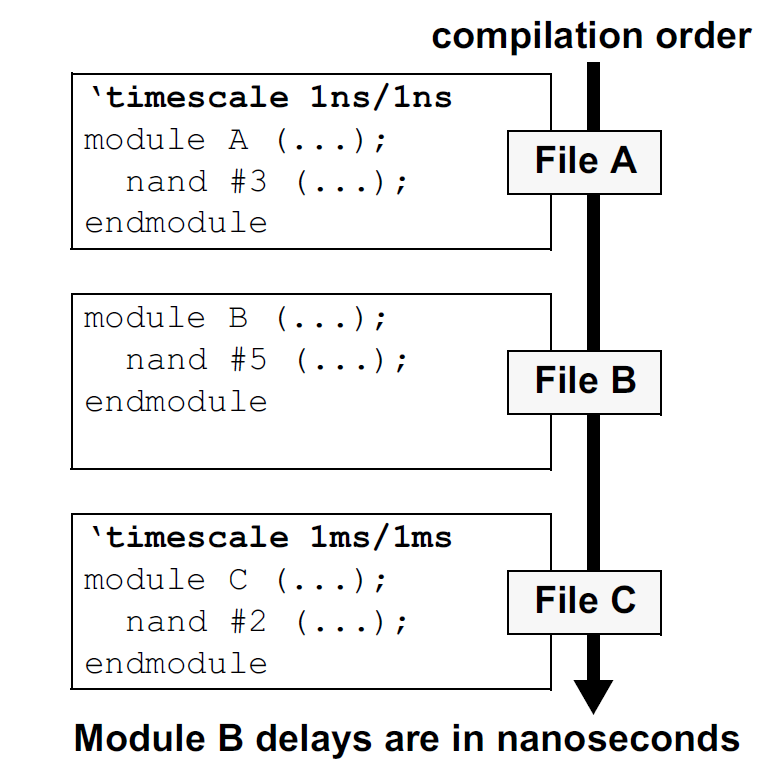
In the following illustration, files A and C contain ‘timescale directives that set the software tool’s time units and time precision for the code that follows the directives. File B, however, does not contain a ‘timescale directive.
If the source files are read in the order of File A then B and then C, the ‘timescale directive that is in effect when module B is compiled is 1 nanosecond units with 1 nanosecond precision. Therefore, the delay of 5 in module B represents a delay of 5 nanoseconds.
If the source files are read in by a compiler in a different order, however, the effects of the compiler directives could be different. The illustration below shows the file order as A then C and then B.
In this case, the ‘timescale directive in effect when module B is compiled is 1 millisecond units with 1 millisecond precision. Therefore, the delay of 5 represents 5 milliseconds. The simulation results from this second file order will be very different than the results of the first file order.
2.4.2 Time values with time units
time units specified as part of the time value
SystemVerilog extends the Verilog language by allowing time units to be specified as part of the time value.
forever #5ns clock = ~clock;
Specifying the time units as part of the time value removes all ambiguity as to what the delay represents. The preceding example is a 10 nanoseconds oscillator (5 ns high, 5 ns low).
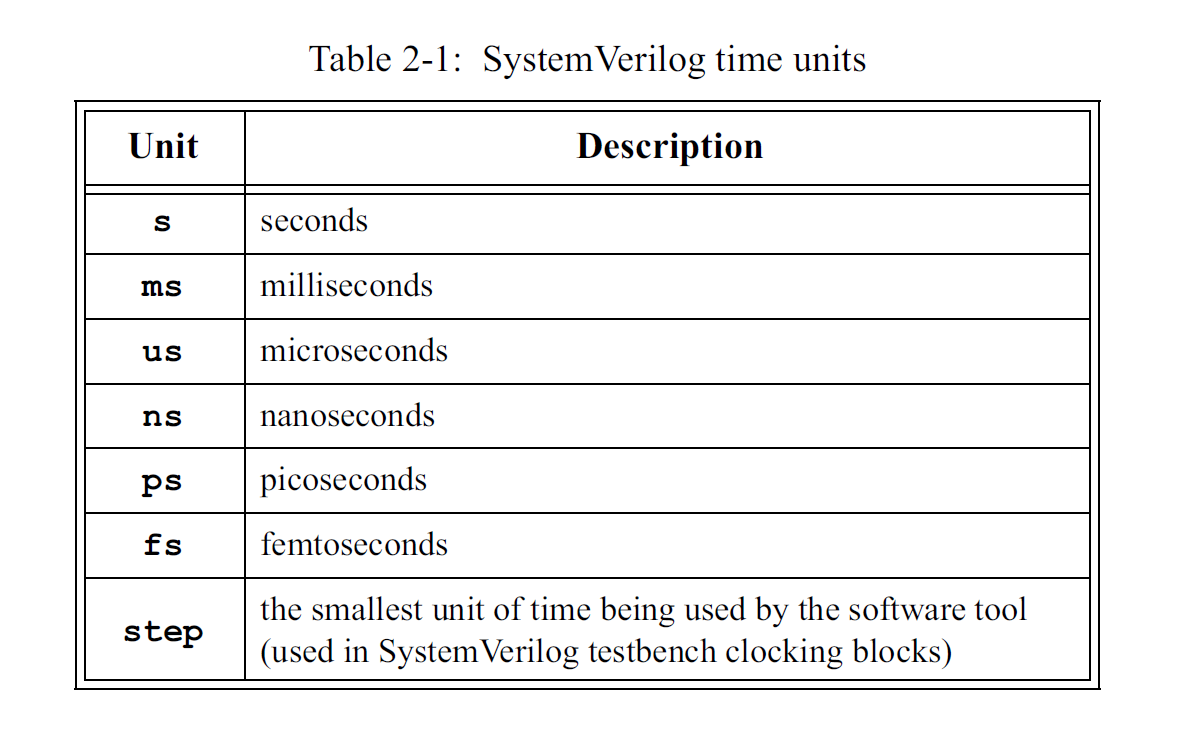
The time units that are allowed are listed in the following table.
note: No space is allowed between the time value and the time unit.
When specifying a time unit as part of the time value, there can be no white space between the value and time unit.
#3.2ps // legal
#4.1 ps // illegal: no space allowed
2.4.3 Scope-level time unit and precision
SystemVerilog allows the time units and time precision of time values to be specified locally, as part of a module, interface or program block, instead of as commands to the software tool (interfaces are discussed in Chapter 10 of this book, and program blocks are presented in the companion book, SystemVerilog for Verification1).
timeunit and timeprecision as part of module definition
In SystemVerilog, the specification of time units is further enhanced with the keywords timeunit and timeprecision. These keywords are used to specify the time unit and precision information within a module, as part of the module definition.
module chip (...);
timeunit 1ns;
timeprecision 10ps;
...
endmodule
The timeunit and timeprecision keywords allow binding the unit and precision information directly to a a module, interface or program block, instead of being commands to the software tool. This resolves the ambiguity and file order dependency that exist
with Verilog’s ‘timescale directive.
The units that can be specified with the timeunit and timeprecision keywords are the same as the units and precision that are allowed with Verilog’s ‘timescale directive. These are the units that are listed in table 2-1 on page 31, except that the special step
unit is not allowed. As with the ‘timescale directive, the units can be specified in multiples of 1, 10 or 100.
note: The timeunit and timeprecision statements must be specified immediately after the module, interface, or program declaration, before any other declarations or statements.
timeunit and timeprecision must be first
The specification of a module, interface or program timeunit and timeprecision must be the first statements within a module, appearing immediately after the port list, and before any other declarations or statements. Note that Verilog allows declarations within the port list. This does not affect the placement of the timeunit and timeprecision statements. These statements must still come immediately after the module declaration. For example:
module adder (input wire [63:0] a, b,
output reg [63:0] sum,
output reg carry);
timeunit 1ns;
timeprecision 10ps;
...
endmodule
2.4.4 Compilation-unit time units and precision
external timeunit and timeprecision
The timeunit and/or the timeprecision declaration can be specified in the compilation-unit scope (described earlier in this chapter, in section 2.2 on page 14). The declarations must come before any other declarations. A timeunit or timeprecision declaration in the compilation-unit scope applies to all modules, program blocks and interfaces that do not have a local timeunit or timeprecision declaration, and which were not compiled with the Verilog ‘timescale directive in effect. At most, one timeunit value and one timeprecision value can be specified in the compilation-unit scope. There can be more than one timeunit or timeprecision statements in the compilationunit scope, as long as all statements have the same value.
time unit and precision search order
With SystemVerilog, the time unit and precision of a time value can be specified in multiple places. SystemVerilog defines a specific search order to determine a time value’s time unit and precision:
• If specified, use the time unit specified as part of the time value.
• Else, if specified, use the local time unit and precision specified in the module, interface or program block.
• Else, if the module or interface declaration is nested within another module or interface, use the time unit and precision in use by the parent module or interface. Nested module declarations are discussed in Chapter 9 and interfaces are discussed in hapter 10.
• Else, if specified, use the `timescale time unit and precision in effect when the module was compiled.
• Else, if specified, use the time unit and precision defined in the compilation-unit scope.
• Else, use the simulator’s default time unit and precision.
backward compatibility
This search order allows models using the SystemVerilog extensions to be fully backward compatible with models written for Verilog. The following example illustrates a mixture of delays with time units, timeunit and timeprecision declarations at both the module and compilation-unit scope levels, and ‘timescale compiler directives. The comments indicate which declaration takes precedence.
Example 2-9: Mixed declarations of time units and precision (not synthesizable)
timeunit 1ns; // external time unit and precision
timeprecision 1ns;
module my_chip ( ... );
timeprecision 1ps; // local precision (priority over external)
always @(posedge data_request) begin
#2.5 send_packet; // uses external units & local precision
#3.75ns check_crc; // specific units take precedence
end
task send_packet();
...
endtask
task check_crc();
...
endtask
endmodule
`timescale 1ps/1ps // directive takes precedence over external
module FSM ( ... );
timeunit 1ns; // local units take priority over directive
always @(State) begin
#1.2 case (State) // uses local units & timescale precision
WAITE: #20ps ...; // specific units take precedence
...
end
endmodule
2.5 Summary
This chapter has introduced SystemVerilog packages and the $unit declaration space. Packages provide a well-defined declaration space where user-defined types, tasks, functions and constants can be defined. The definitions in a package can be imported into any number of design blocks. Specific package items can be imported, or the package definitions can be added to a design block’s search path using a wildcard import. The $unit declaration space provides a quasi global declaration space. Any definitions not contained within a design block, testbench block or package falls into the $unit compilation-unit space. Care must be taken when using $unit to avoid file order dependencies and differences between separate file compilation and multifile
compilation. This chapter provided coding guidelines for the proper usage of the $unit compilation-unit space.
SystemVerilog also allows local variables to be defined in unnamed begin...end blocks. This simplifies declaring local variables, and also hides the local variable from outside the block. Local variables in unnamed blocks are protected from being read or modified from code that is not part of the block.
SystemVerilog also enhances how simulation time units and precision are specified. These enhancements eliminate the file order dependencies of Verilog’s ‘timescale directive.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号