

Review summary(一)
The high level of English is a standard for a top student.
1. Most of the time,what we can’t forget is the memory between us instead of the person we used to love.
2. The ignorant man is not free, because what confronts him is an alien world.
3. All life in nature is precious and equal. Love the whole nature and you will get a lot of invisible power.
4. Don’t let life change your goals, because achieving your goals can change your life.
5. Life is a journey, not the destination, but the scenery along the should be and the mood at the view.
6. Three regrets in life: don't choose; Don't stick to choose; Constantly choose .
7. If you can do what you do best and be happy, you're further along in life than most people.
“I will accept everything I am, and everything I am not.”
8. Self-worth comes from one thing: thinking that you are worthy. So be confident. Too many days are wasted comparing ourselves to others and wishing to be something we aren’t. Everybody has their own strengths and weaknesses, and it is only when you accept everything you are, and aren’t, that you will truly find happiness and success.
“I will appreciate others for who they are.”
9. Sometimes the way you think about a person isn’t the way they are. On the outside, maybe they laugh, and maybe they cry; but you would be surprised at everything they keep deep inside. So pay close attention, and love the people you care about for who they are, and not for who you want them to be. In the long run, this is how you will get the best of them.
“I will speak kindly and consciously to others.”
10. Open your mind before you open your mouth. Don’t mix bad words with a bad mood. Just be calm and deal with your emotions. You’ll have many opportunities to change your mood, but you’ll have an extremely tough time recovering the words you have spoken.
“I will stop trying to control everything.”
11. You can’t control everything in your life no matter how many safeguards you put into place. But thankfully, you don’t have to control everything to find peace and happiness. It lives with you always, deep within. More than getting into the nuances of control itself, you should be more interested in encouraging yourself to commit to giving it up, on purpose. See what happens when you loosen your grip, throw your hands into the air, and allow life to just happen and flow as it does, without constant micromanagement.
“I will appreciate the beauty of small moments.”
12. Positive minds live positive lives. There is always, always something to be thankful for and something to smile about. The happiest people are not those who get everything they want; they are those who, while in pursuit of worthy goals, notice and appreciate the beauty and sweetness of everyday moments.
13. Self-disciplined people are not all outstanding people. But nearly all outstanding people are self-disciplined people.
14. The best feeling in the world is when you know your heart is smiling.
15. To see clearly about this world is not necessarily going to make this world become better. But after you see clearly what the world really is and how it works, you may enable yourself to become better.
11 Secrets to Speaking English Fluently Fast
Concentrate on Reading
Rather than reading text books, focus on reading novels. If you enjoy the material you’re reading, you’re much more likely to continue to push yourself. Start with children’s books and work up to more complicated pieces.
A great starting point for adult literature is to find a copy of your favourite book in English so you already know the gist of the story and can use that basic understanding to effectively work out what the words and phrases you’re reading mean.
appendix :How To Learn English Very Fast(https://effortlessenglishclub.com/how-to-learn-english-very-fast)
Practice Every Day
Use an App to Help You
The essential of resource about IELTS (https://www.chinaielts.org/
(一) Robotics System Toolbox Product Description(https://ww2.mathworks.cn/help/robotics/gs/product-description.html)
Entrance
https://ww2.mathworks.cn/help/robotics/getting-started-with-robotics-system-toolbox.html
When you work with ROS, you will typically follow these steps:
-
Connect to a ROS network. To connect to a ROS network, you can create the ROS master in MATLAB or connect to an existing ROS master. In both cases, MATLAB will also create and register its own ROS node (called the MATLAB "global node") with the master. The
rosinitfunction manages this process. -
Exchange Data. Once connected, MATLAB exchanges data with other ROS nodes through publishers, subscribers, and services.
-
Disconnect from the ROS network. Calling the
rosshutdownfunction disconnects MATLAB from the ROS network.
Control the TurtleBot with Teleoperation (https://ww2.mathworks.cn/help/robotics/examples/control-turtlebot-with-teleoperation.html)
Connect to an Existing Gazebo Simulator
If you already have Gazebo running on a Linux distribution, set up the simulator as described here:
-
-
On the ROS website, download the appropriate packages for TurtleBot.
-
Follow the instructions on the ROS website to get the TurtleBot running in a simulated Gazebo environment.
-
Make sure the environment variables are appropriately set and that you can ping back and forth between your host computer and the Gazebo computer. There are many ways to set up the network. The Connect to a ROS Network example contains tips on how to verify connectivity between devices in the ROS network.
-
Make sure you have access to the following topics. In the terminal on the Linux machine, type
rostopic listto see the available topics.
-
/odom /mobile_base/commands/velocity /mobile_base/commands/reset_odometry /mobile_base/sensors/bumper_pointcloud /mobile_base/events/cliff /camera/rgb/image_raw /scan
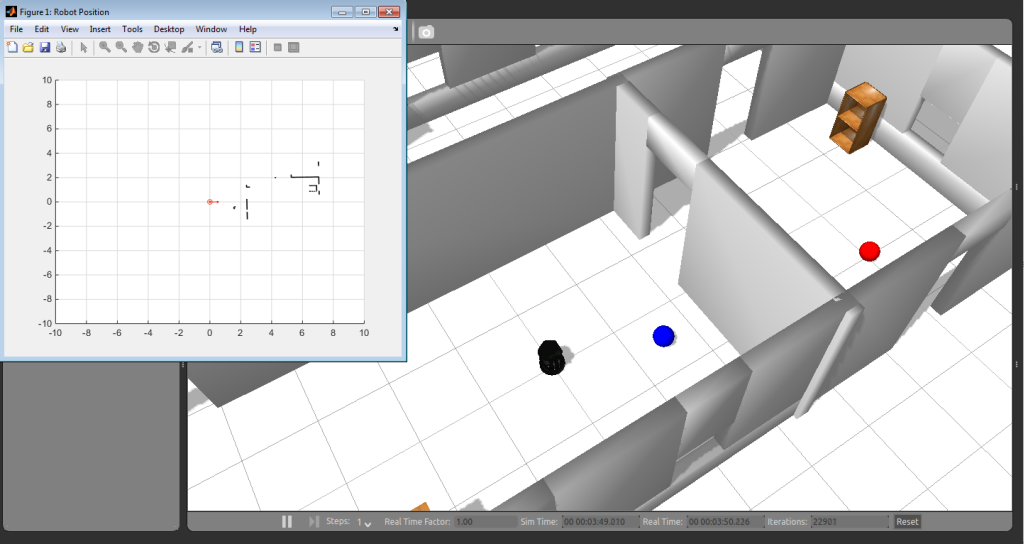
Obstacle Avoidance Using TurtleBot (https://ww2.mathworks.cn/help/robotics/examples/obstacle-avoidance-using-turtlebot-robot.html)
(二) ROS(Robot Operating System) (https://www.allaboutcircuits.com/technical-articles/an-introduction-to-robot-operating-system-ros/)
Developing a robot with a computer brain requires a bunch of software tools on the computer side—like software drivers, third party tools for computer vision and simulation tools. ROS framework gathers all these tools and manages how you develop a code for your robot.
Instead of reinventing the wheel every time, some frameworks can help you by gathering all these tools and managing how you develop code for your robot. ROS (Robot Operating System) is one of these frameworks. It’s a special framework initially developed by the Stanford AI Laboratory in 2007 for developing robots. The Open Source Robotics Foundation now maintains ROS.
The concept of ROS goes far beyond just a framework. ROS is an OS in concept because it provides all the services that any other OS does—like hardware abstraction, low-level device control, implementation of commonly-used functionality, message-passing between processes, and package management. Even though ROS is still a framework that isn't a standalone OS or an RTOS and isn't the only framework for robots, it seems to be adopted widely and have a large developers community.
An Overview of How ROS Works
In general, ROS consists of code and tools that help your project's code run and do the required job—including the infrastructure for running it, like messages passing between processes.
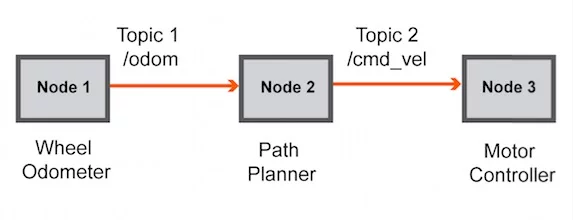
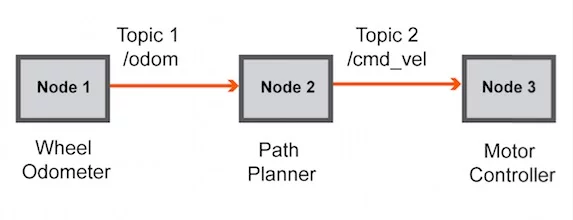
ROS is designed to be a loosely coupled system where a process is called a node and every node should be responsible for one task. Nodes communicate with each other using messages passing via logical channels called topics. Each node can send or get data from the other node using the publish/subscribe model. We are going to see that in action later.
The primary goal of ROS is to support code reuse in robotics research and development so you can find a built-in package system. Again, keep in mind that ROS is not an OS, a library, or an RTOS. It’s a framework using the concept of an OS.
In order to manage this loosely-coupled environment, there is a Master in ROS which is responsible for name registration and lookup for the rest of the system. Without the Master, nodes would not be able to find each other or exchange messages. To start the Master you should issue roscore or roslaunch.
Navigating the ROS wiki (http://wiki.ros.org/ROS/Tutorials/NavigatingTheWiki)
