
2d物理引擎学习 - 基于约束的公式解决接触稳定性问题
先看下直接用弹性碰撞的公式,会出现的问题:
Box落在地面上后,没有停在地面上,而是还在不断的下沉。
弹性碰撞公式处理碰撞后弹开没有大问题,但是处理物体碰撞后的接触存在不稳定问题。
如何解决?
目前物理引擎最主流的解决方法是:基于约束来组织物理公式,而不是直接套用物理公式。
什么叫约束?就是让两个物体满足我们设定的规则(专业点叫约束方程)。
接触过程中涉及的约束
下图中下方的物体为A,上方的物体为B
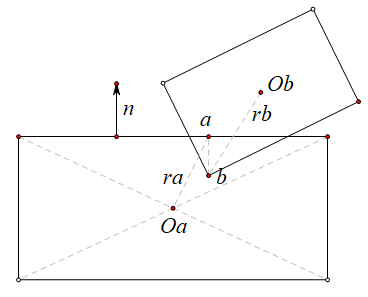
1) 要让B不再下沉,就是要让两者维持现有穿透距离不再变化
穿透距离的函数可以这么表示:C = (a-b) • n,C是constraint的缩写,n是碰撞法线方向
2) 怎么让该函数不再变化?
函数的导数为0时,函数值就不再变化。
导数tips:导数表示的是函数的变化率,一元函数的导数为变量前的系数。
因为 x = v * t,即:距离 = 速度 * 时间,而cd其实就是一段距离,它也是和时间有关,在随着时间慢慢变大。
函数写成关于时间t的表示方法:C = (vpa*t - vpb*t) • n,vpa表示点a处的合速度,vpb表示点b处的合速度
因为接触法线方向不经过物体的质心,所以碰撞后会导致物体旋转,所以这边的速度是线速度和角速度的合速度
vpa = va + ωa × ra
vpb = vb + ωb × rb
ra = a - Oa
rb = b - Ob
3) 求函数C的导数C'

因为现在要让导数为0,即C' = (vpa - vpb) • n = 0,所以要将速度进行修正,修正到碰撞点的相对速度在碰撞法线上的投影值为0。
改变速度的方式有很多,这边选择物理引擎中常用的方法,用冲量的来改变速度(至于为啥是冲量,没去深纠,暂时认为是一种最佳实践吧)
4) 下面其实就和两物体碰撞后反弹的公式差不多了
冲量 = 动量的变化:n表示碰撞法向量
所以,施加冲量后的线速度和角速度

碰撞点处的合线速度
施加冲量修正速度后的相对速度
因为要求修正后碰撞点的相对速度在碰撞法线上的投影值为0,所以
方程右侧的分母部分,也叫作有效质量
根据拉格朗日公式(二重向量叉乘化简公式)
化简后

一顿操作猛如虎,这个方程和弹性碰撞后速度的方程没有区别,只要把弹性系数e=0,就完全一样。那不还是没法解决接触稳定性问题嘛!!!!!!
是的,但是从约束的角度考虑物理公式,就给了我们进一步修正的余地;直接套用物理公式,出问题时除了改物理公式没其他余地。
5) 分析原因
5-a) 浮点数误差,冲量修正后的速度存在轻微误差,但随着时间不断叠加,就慢慢的变成大误差了,表现就是慢慢下沉。
5-b) 物理公式中的接触面是连续的整体,而代码中是用的2个离散的接触点,且还是独立的,没有关联性;那有没有可能出现,对A点用冲量修正后对了,再对B点用冲量修正后,B点对了但A点又不对了。
解决办法:A, B两点修正完后,我再修正一次,甚至迭代修正多次,让修正后的偏差变小。
这个方法可行,但并没有完全消除掉修正后的偏差。不过在这边不做处理了,因为已经看不出来了;后面讲到堆叠问题再处理,因为相关理论会更复杂点
6) 看下效果
迭代修正3次后,下沉变慢了
迭代修正10次,偏差值更小了
迭代修正50次,看上去没偏差了。虽然50次很好,但真正在游戏中的话,一帧不可能让迭代50次的,会卡成ppt的。
下面的公式合法吗?
vpa = va + ωa × ra,因为ωa是一个标量,标量能叉乘矢量ra?
先看张图
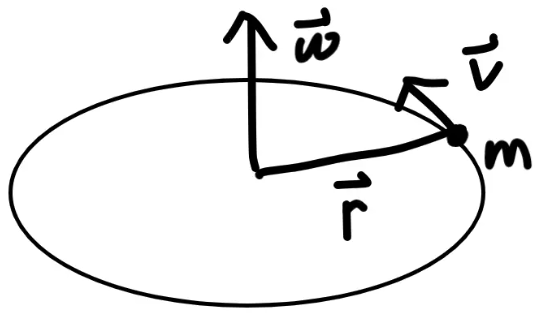
ωa在这边其实表示的是一个z值,要转成3d向量来看
工具函数
public static Vector2 ZCross(float z, Vector2 v2) { Vector2 result = new Vector2(-z * v2.y, z * v2.x); return result; }
代码
public class MyRigidbody : MonoBehaviour { private int m_Id; [SerializeField] private Vector2 m_Size; //刚体形状现在固定为Box //---------- 线性运动 [SerializeField] private float m_Mass; //质量 private float m_InvMass; private Vector2 m_Force; //持续作用的力 private Vector2 m_ForceImpulse; //脉冲力 [SerializeField] private Vector2 m_Velocity; //当前移动速度 [SerializeField] private Vector2 m_Position; //当前位置 //---------- //----------角运动 private float m_Inertia; //转动惯量 private float m_InvInertia; private float m_Torque; //持续作用的力矩 private float m_TorqueImpulse; //冲量矩 [SerializeField] private float m_AngleVelocity; //角速度(弧度) [SerializeField] private float m_Rotation; //旋转角度 //---------- void Start() { if (m_Mass <= 0) { Mass = float.PositiveInfinity; Inertia = float.PositiveInfinity; } else { Mass = m_Mass; Inertia = m_Mass * (m_Size.x * m_Size.x + m_Size.y * m_Size.y) / 12.0f; } } public MyRigidbody() { } public MyRigidbody(float mass, float inertia) { Mass = mass; Inertia = inertia; } public int Id { get { return m_Id; } set { m_Id = value; } } public Vector2 Size { get { return m_Size; } set { m_Size = value; } } public float Friction { get { return m_Friction; } set { m_Friction = value; } } //---------- 线性运动 public float Mass { get { return m_Mass; } set { m_Mass = value; if (value >= float.PositiveInfinity) m_InvMass = 0; else m_InvMass = 1 / value; } } public float InvMass { get { return m_InvMass; } } public Vector2 Position { get { return m_Position; } set { m_Position = value; } } public Vector2 Velocity { get { return m_Velocity; } } //线性冲量产生线速度变化 public void ApplyImpulse(Vector2 impulse) { // 动量定理: I = Δp = m * Δv m_Velocity += impulse * m_InvMass; } //---------- //----------角运动 public float Inertia { get { return m_Inertia; } set { m_Inertia = value; if (value >= float.PositiveInfinity) m_InvInertia = 0; else m_InvInertia = 1 / value; } } public float InvInertia { get { return m_InvInertia; } } public float AngleVelocity { get { return m_AngleVelocity; } } public float Rotation { get { return m_Rotation; } set { m_Rotation = value; } } /// <summary> /// 线性冲量产生角速度变化 /// </summary> /// <param name="r">矢径, 物体质心指向碰撞点</param> /// <param name="impulse">线性冲量</param> public void ApplyTorqueImpulse(Vector2 r, Vector2 impulse) { //角冲量: H = r × 线性冲量; r为力臂向量(或叫矢径), r与线性冲量方向垂直; float torqueImpulse = r.x * impulse.y - r.y * impulse.x; //角动量定理: H = ΔL = I * Δω //所以角速度的变化: Δω = H / I m_AngleVelocity += torqueImpulse * m_InvInertia; } //---------- public Vector2 GetPointVelocity(Vector2 r) { //角运动线速度: v = ω × r, r是矢径; //或v = ω * r * dir, 此处的r是力臂长度, dir为线速度方向, 这边将向量的大小和方向分开了 Vector2 v = new Vector2(-r.y, r.x) * m_AngleVelocity; return m_Velocity + v; } //计算力和冲量引起的速度变化 public void PreUpdate(Vector2 gravity, float dt) { //----- 持续力 //a = F / m //v1 = v0 + a * t m_Velocity += (m_Force * m_InvMass + gravity) * dt; //角加速度 = 力矩 / 惯量 //ω1 = ω0 + 角加速度 * t m_AngleVelocity += m_Torque * m_InvInertia * dt; //----- //----- 脉冲力(冲量) //动量定理: 冲量 = Δp = m * Δv // >>> Δv = 冲量 / m m_Velocity += m_ForceImpulse * m_InvMass; //角动量定理: 角冲量 = ΔL = 惯量 * Δω // >>> Δω = 角冲量 / 惯量 m_AngleVelocity += m_TorqueImpulse * m_InvInertia; m_ForceImpulse = Vector2.zero; //冲量是瞬时效果, 作用完就置零 m_TorqueImpulse = 0; //----- } //根据速度进行运动 public void PostUpdate(float dt) { m_Position += m_Velocity * dt; m_Rotation += m_AngleVelocity * dt; } #if UNITY_EDITOR public Color m_GizmosColor = Color.white; private Vector2[] m_TempVerts = new Vector2[4]; private void UpdateCorners() { Vector2 halfSize = m_Size * 0.5f; m_TempVerts[0] = -halfSize; //lb m_TempVerts[1] = new Vector2(-halfSize.x, halfSize.y); //lt m_TempVerts[2] = halfSize; //rt m_TempVerts[3] = new Vector2(halfSize.x, -halfSize.y); //rb } public Vector2[] GetVerts() { UpdateCorners(); for (int i = 0; i < m_TempVerts.Length; ++i) m_TempVerts[i] = this.transform.TransformPoint(m_TempVerts[i]); return m_TempVerts; } private void OnDrawGizmos() {
if (m_Size.sqrMagnitude <= 0) return; { var oldColor = Gizmos.color; Gizmos.color = m_GizmosColor; var verts = GetVerts(); var trans = this.transform; if (Application.isPlaying) { trans.position = m_Position; trans.eulerAngles = new Vector3(0, 0, Mathf.Rad2Deg * m_Rotation); } else { m_Position = trans.position; m_Rotation = trans.eulerAngles.z * Mathf.Deg2Rad; } for (int i = 0; i < verts.Length; ++i) { var pos1 = verts[i]; var pos2 = verts[(i + 1) % verts.Length]; Gizmos.DrawLine(pos1, pos2); } Gizmos.color = oldColor; } } #endif }
enum CollisionStage { None, Enter, Stay, Exit, } //CollisionPair使用两个刚体的id作为索引 struct CollisionPairKey { public int m_IdA; public int m_IdB; public CollisionPairKey(int idA, int idB) { m_IdA = idA; m_IdB = idB; } } class CollisionPair { public int m_UpdateIndex; //发生碰撞时的帧 public MyRigidbody m_RigidbodyA; public MyRigidbody m_RigidbodyB; public CollisionStage m_Stage = CollisionStage.None; public ContactInfo[] m_Contacts = new ContactInfo[2]; //box最多2个碰撞点 public int m_NumContacts; } //碰撞点信息 public class ContactInfo { public Vector2 m_Point; //碰撞点 public Vector2 m_Normal; //碰撞法向量(分离方向), 这边用A指向B, 即: B反弹方向 public float m_Penetration; //穿透深度(分离距离) }
public class MyPhysics : MonoBehaviour { public int m_MaxIterCount = 10; [SerializeField] private Vector2 m_Gravity = Vector2.zero; private List<MyRigidbody> m_RigidbodyList = new List<MyRigidbody>(); private List<MyRigidbody> m_PendingAddList = new List<MyRigidbody>(); //要添加的刚体会在下一帧添加 private List<MyRigidbody> m_PendingRemoveList = new List<MyRigidbody>(); //要删除的刚体在下一帧删除 private Dictionary<CollisionPairKey, CollisionPair> m_CollisionPairDict = new Dictionary<CollisionPairKey, CollisionPair>(); //两个发生碰撞的物体 private List<CollisionPairKey> m_TempRemoveCollisionPairList = new List<CollisionPairKey>(); private int m_IdCounter; //刚体id计数 private int m_UpdateCounter; //更新计数 private B2SatCollide m_Sat = new B2SatCollide(); void Start() { var initRigidbodys = GetComponentsInChildren<MyRigidbody>(); foreach (var rigidbody in initRigidbodys) { AddRigidbody(rigidbody); } } void FixedUpdate() { if (Time.fixedDeltaTime <= 0) return; Step(Time.fixedDeltaTime); } public void Step(float dt) { CheckPendingList(); m_UpdateCounter++; for (int i = 0; i < m_RigidbodyList.Count; ++i) { var rigidbody = m_RigidbodyList[i]; if (0 == rigidbody.InvMass) continue; rigidbody.PreUpdate(m_Gravity, dt); } CheckCollision(); UpdateSeperation(dt); for (int i = 0; i < m_RigidbodyList.Count; ++i) { var rigidbody = m_RigidbodyList[i]; rigidbody.PostUpdate(dt); } } //检查发生碰撞的物体 private void CheckCollision() { for (int i = 0; i < m_RigidbodyList.Count; ++i) { var rigidbodyA = m_RigidbodyList[i]; for (int j = i + 1; j < m_RigidbodyList.Count; ++j) { var rigidbodyB = m_RigidbodyList[j]; if (0 == rigidbodyA.InvMass && 0 == rigidbodyB.InvMass) continue; if (m_Sat.Collide(rigidbodyA, rigidbodyB) > 0) { if (rigidbodyA.Id < rigidbodyB.Id) OnCollide(rigidbodyA, rigidbodyB); else OnCollide(rigidbodyB, rigidbodyA); } } } } //刚体上关联的形状发生碰撞 private void OnCollide(MyRigidbody rigidbodyA, MyRigidbody rigidbodyB) { var key = new CollisionPairKey(rigidbodyA.Id, rigidbodyB.Id); if (!m_CollisionPairDict.TryGetValue(key, out var collisionInfo)) //之前没发生过碰撞(第1次碰撞) { collisionInfo = new CollisionPair(); collisionInfo.m_RigidbodyA = rigidbodyA; collisionInfo.m_RigidbodyB = rigidbodyB; m_CollisionPairDict.Add(key, collisionInfo); } collisionInfo.m_UpdateIndex = m_UpdateCounter; //发生了碰撞就更新帧id, 如果有一帧没更新, 就说明那一帧没发生碰撞 collisionInfo.m_NumContacts = m_Sat.NumContacts; for (int i = 0; i < collisionInfo.m_NumContacts; ++i) collisionInfo.m_Contacts[i] = m_Sat.GetContact(i); if (collisionInfo.m_Stage == CollisionStage.None) //第1次碰撞 { collisionInfo.m_Stage = CollisionStage.Enter; } } //物体发生弹性碰撞, 会相互弹开 private void UpdateSeperation(float dt) { foreach (var entry in m_CollisionPairDict) { var collisionPair = entry.Value; if (collisionPair.m_UpdateIndex != m_UpdateCounter) //上一帧没发生碰撞 { collisionPair.m_Stage = CollisionStage.Exit; } switch (collisionPair.m_Stage) { case CollisionStage.Enter: //todo: 通知Enter事件 collisionPair.m_Stage = CollisionStage.Stay; break; case CollisionStage.Exit: //todo: 通知Exit事件 collisionPair.m_Stage = CollisionStage.None; var key = new CollisionPairKey(collisionPair.m_RigidbodyA.Id, collisionPair.m_RigidbodyB.Id); m_TempRemoveCollisionPairList.Add(key); //for循环中删除会报错 break; } if (CollisionStage.Stay == collisionPair.m_Stage) { //todo: 通知Stay事件 } } if (m_TempRemoveCollisionPairList.Count > 0) { for (int i = 0; i < m_TempRemoveCollisionPairList.Count; ++i) { var key = m_TempRemoveCollisionPairList[i]; m_CollisionPairDict.Remove(key); } m_TempRemoveCollisionPairList.Clear(); } for (int i = 0; i < m_MaxIterCount; ++i) { foreach (var entry in m_CollisionPairDict) { PostSeperation(dt, entry.Value); } } } private void PostSeperation(float dt, CollisionPair collisionPair) { var rigidbodyA = collisionPair.m_RigidbodyA; var rigidbodyB = collisionPair.m_RigidbodyB; for (int i = 0; i < collisionPair.m_NumContacts; ++i) { var contact = collisionPair.m_Contacts[i]; Vector2 ra = contact.m_Point - rigidbodyA.Position; Vector2 rb = contact.m_Point - rigidbodyB.Position; var relativeV = rigidbodyB.GetPointVelocity(rb) - rigidbodyA.GetPointVelocity(ra); var normal = contact.m_Normal; float relativeVN = Vector2.Dot(relativeV, normal); //投影到法向量 //if (relativeVN > 0) //相对速度>0时, 表明没有碰撞趋势了 // return; float kMassNormal = rigidbodyA.InvMass + rigidbodyB.InvMass; float raN = Vector2.Dot(ra, normal); float rbN = Vector2.Dot(rb, normal); kMassNormal += rigidbodyA.InvInertia * (Vector2.Dot(ra, ra) - raN * raN) + rigidbodyB.InvInertia * (Vector2.Dot(rb, rb) - rbN * rbN); float massEffective = 1 / kMassNormal; //Δp = (v2 - v1) / kMass float deltaPN = relativeVN * massEffective; deltaPN = -deltaPN; //对Δp取反, 主要是为了让累加冲量是正值 deltaPN = Mathf.Max(deltaPN, 0); Vector2 impulseN = deltaPN * normal; //转为矢量 rigidbodyA.ApplyImpulse(-impulseN); rigidbodyA.ApplyTorqueImpulse(ra, -impulseN); rigidbodyB.ApplyImpulse(impulseN); rigidbodyB.ApplyTorqueImpulse(rb, impulseN); } } private void CheckPendingList() { if (m_PendingAddList.Count > 0) { for (int i = 0; i < m_PendingAddList.Count; ++i) { var rigidbody = m_PendingAddList[i]; rigidbody.Id = m_IdCounter++; rigidbody.OnAddToPhysics(); m_RigidbodyList.Add(rigidbody); } m_PendingAddList.Clear(); } if (m_PendingRemoveList.Count > 0) { for (int i = 0; i < m_PendingRemoveList.Count; ++i) { var rigidbody = m_PendingRemoveList[i]; m_RigidbodyList.Remove(rigidbody); rigidbody.OnRemoveFromPhysics(); } m_PendingRemoveList.Clear(); } } public void AddRigidbody(MyRigidbody rigidbody) { m_PendingAddList.Add(rigidbody); } public void RemoveRigidbody(MyRigidbody rigidbody) { m_PendingRemoveList.Add(rigidbody); } #if UNITY_EDITOR public Color m_GizmosColor = Color.white; private void OnDrawGizmos() { var oldColor = Gizmos.color; Gizmos.color = m_GizmosColor; Handles.color = m_GizmosColor; foreach (var entry in m_CollisionPairDict) { var collisionPair = entry.Value; for (int i = 0; i < collisionPair.m_NumContacts; ++i) { var contactInfo = collisionPair.m_Contacts[i]; DrawGizmosHelper.DrawPoint2(contactInfo.m_Point); DrawGizmosHelper.DrawArrowLine(contactInfo.m_Point, contactInfo.m_Normal, 0.5f); } } Gizmos.color = oldColor; Handles.color = oldColor; } #endif }
参考
2D 游戏物理引擎 - 碰撞约束 - 知乎 (zhihu.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号