
旋转矩阵一些用法备忘
Box_A的旋转角度为a
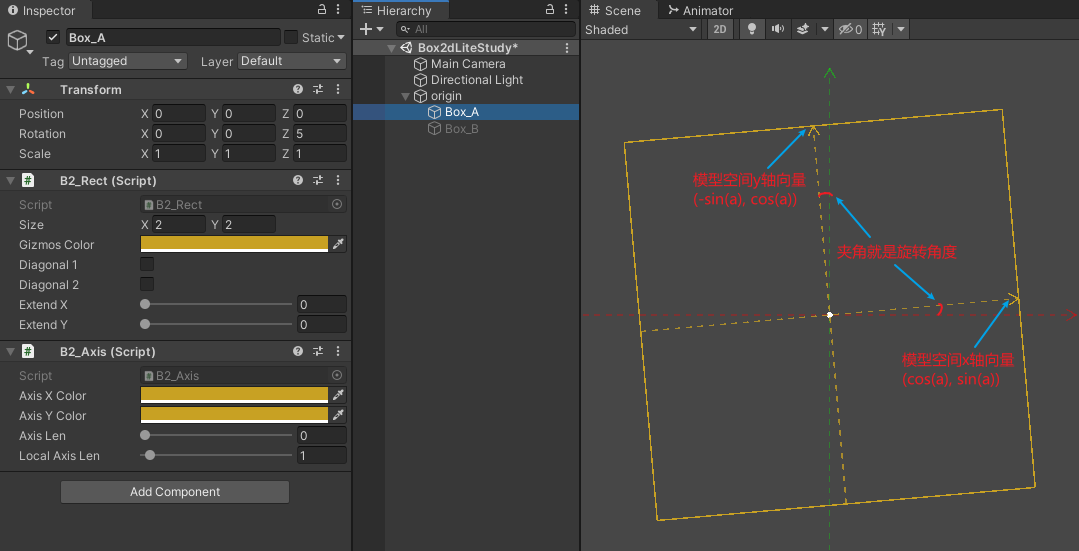
旋转矩阵为:
a) 用于做localToWorld的变换,这个矩阵的col1, col2分别表示模型空间的x轴、y轴坐标(世界坐标)
b) 求点在世界坐标轴上的投影(世界坐标)
c) abs(RotA) * rightTopPoint_Local,求Box_A相对世界坐标轴的AABB包围盒halfSize
旋转矩阵的转置矩阵或逆矩阵为:
a) 用于做worldToLocal变换,这个矩阵的row1, row2分别表示模型空间的x轴、y轴坐标(世界坐标)
b) 求点在模型空间坐标轴上的投影(local坐标)
c) abs(RotAT) * rightTopPoint_Local,求相对模型空间坐标轴的AABB包围盒halfSize

 浙公网安备 33010602011771号
浙公网安备 33010602011771号