四叉树加速碰撞检测
1) 加速原理:排除掉那些不可能发生的碰撞检测,通过减少碰撞检测次数来加速。
2) 如何排除不可能发生的碰撞检测?
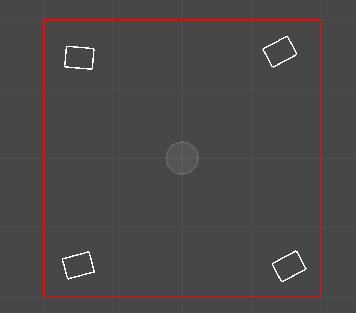
比如:现在要检测左上角的物体A和哪些物体发生了碰撞,最简单的方式就是用for循环,把场景中的所有物体都检测一遍,看是否发生了碰撞。
但我们一眼就能看出,其他3个都在角落里,不可能和物体A发生碰撞。
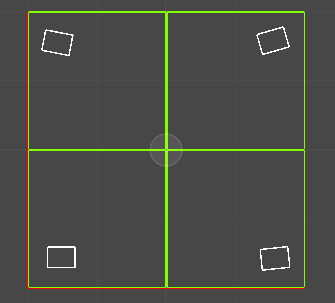
如果我们把这块大的区域分成4个小一点的区域,然后把4个物体重新放到4个小的区域中,那此时要检测左上角的物体A与哪些物体发生碰撞,
还是用for循环把左上角小区域中的所有物体都检测一遍,发现没有其他物体,所以都不需要执行检测。
现在左上角的小区域物体又增加了,增加到了4个,是不是又回到了一开始的情况,只是这次是从一个大区域的4个物体,变成了小区域的4个物体。
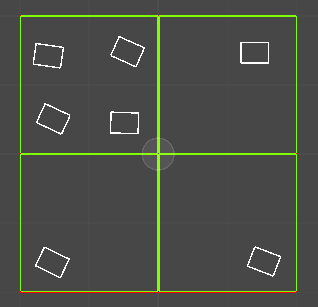
那还是按照之前的方法,继续分成4个小一点的区域。
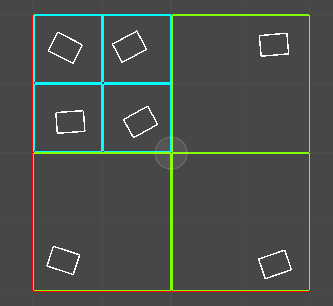
所以,核心思想就是,让一个区域内的参与检测的物体数量尽可能的少,多了就把区域缩小,原来区域内的物体重新编排到新的区域中,这样要执行的碰撞检测次数就少了。
3) 为什么要用树结构?
因为树结构有层级关系,每一层都是包含关系,顶层包含一层,一层包含二层。而这边的大区域,小区域也是包含关系,很适合用树结构来表达。
最大的那个区域数据保存在树的根节点上,分出来的4个小区域数据保存在根节点的4个子节点上,以此类推。
参与碰撞的物体是保存在最底层的叶子节点上的,中间层的节点不会保存。
效果
using System.Collections.Generic; using UnityEngine; public class MyQuadTree { public interface IShape { Rect GetBounds(); string GetShapeName(); } private Rect m_Bounds = new Rect(0, 0, 1, 1); private int m_Depth; //节点深度(从0开始) private int m_MaxDepth = 4; //树最大深度 private MyQuadTree[] m_Children;// = new MyQuadTree[4]; //当前节点的4个子节点 private List<IShape> m_ShapeList = new List<IShape>(); private int m_SplitThreshold = 10; //存放的对象超过这个值时分裂为4个子节点 public MyQuadTree(Rect bounds, int splitThreshold = 10, int maxDepth = 4) { m_Bounds = bounds; m_SplitThreshold = splitThreshold; m_MaxDepth = maxDepth; } public Rect Bounds { get { return m_Bounds; } } public int Depth { get { return m_Depth; } } public int MaxDepth { get { return m_MaxDepth; } } public int GetShapeCount() { return m_ShapeList.Count; } public IShape GetShape(int i) { return m_ShapeList[i]; } public MyQuadTree GetChild(int index) { if (null != m_Children) return m_Children[index]; return null; } public void AddShape(IShape shape) { if (null != m_Children) { AddShapeToBelong(shape); return; } m_ShapeList.Add(shape); if (m_ShapeList.Count > m_SplitThreshold) { if (m_Depth >= m_MaxDepth) { //Debug.LogWarning($"split fail: reach maxDepth:{m_MaxDepth}"); return; } m_Children = new MyQuadTree[4]; Split(); //形状重新分配到新分裂的节点中 for (int i = 0; i < m_ShapeList.Count; ++i) { AddShapeToBelong(m_ShapeList[i]); } m_ShapeList.Clear(); } } //节点一分为4, 每个节点占据的大小为原来的1/4 private void Split() { int nextDepth = m_Depth + 1; float halfWidth = m_Bounds.width * 0.5f; float halfHeight = m_Bounds.height * 0.5f; float xMid = m_Bounds.xMin + halfWidth; float yMid = m_Bounds.yMin + halfHeight; var leftBottomRect = new Rect(m_Bounds.xMin, m_Bounds.yMin, halfWidth, halfHeight); m_Children[0] = new MyQuadTree(leftBottomRect, m_SplitThreshold, m_MaxDepth); m_Children[0].m_Depth = nextDepth; var leftTopRect = new Rect(m_Bounds.xMin, yMid, halfWidth, halfHeight); m_Children[1] = new MyQuadTree(leftTopRect, m_SplitThreshold, m_MaxDepth); m_Children[1].m_Depth = nextDepth; var rightTopRect = new Rect(xMid, yMid, halfWidth, halfHeight); m_Children[2] = new MyQuadTree(rightTopRect, m_SplitThreshold, m_MaxDepth); m_Children[2].m_Depth = nextDepth; var rightBottomRect = new Rect(xMid, m_Bounds.yMin, halfWidth, halfHeight); m_Children[3] = new MyQuadTree(rightBottomRect, m_SplitThreshold, m_MaxDepth); m_Children[3].m_Depth = nextDepth; } private int[] m_TempIndex = new int[4]; //获取包围盒所属的节点索引 private int[] GetAABBBelongIndexes(Rect aabb) { int index = 0; if (aabb.Overlaps(m_Bounds)) { float halfWidth = m_Bounds.width * 0.5f; float halfHeight = m_Bounds.height * 0.5f; float xMid = m_Bounds.xMin + halfWidth; float yMid = m_Bounds.yMin + halfHeight; var left = aabb.xMin < xMid; var right = aabb.xMax > xMid; var bottom = aabb.yMin < yMid; var top = aabb.yMax > yMid; if (left) { if (bottom) m_TempIndex[index++] = 0; if (top) m_TempIndex[index++] = 1; } if (right) { if (top) m_TempIndex[index++] = 2; if (bottom) m_TempIndex[index++] = 3; } } for (int i = index; i < 4; ++i) m_TempIndex[i] = -1; return m_TempIndex; } //添加到所属的节点, 可以属于多个节点 private void AddShapeToBelong(IShape shape) { var shapeBounds = shape.GetBounds(); var allIndexes = GetAABBBelongIndexes(shapeBounds); for (int i = 0; i < allIndexes.Length; ++i) { int index = allIndexes[i]; if (-1 == index) break; m_Children[index].AddShape(shape); } } private HashSet<IShape> m_TempSet = new HashSet<IShape>(); //获取与该包围盒发生碰撞的所有Shape public List<IShape> Query(Rect bounds) { m_TempSet.Clear(); Query(bounds, m_TempSet); return new List<IShape>(m_TempSet); } private void Query(Rect bounds, HashSet<IShape> result) { //一个Shape可能会添加到多个节点, 用set达到去重效果 for (int i = 0; i < m_ShapeList.Count; ++i) result.Add(m_ShapeList[i]); var allIndexes = GetAABBBelongIndexes(bounds); if (null != m_Children) { for (int i = 0; i < allIndexes.Length; ++i) { int index = allIndexes[i]; if (-1 == index) break; m_Children[index].Query(bounds, result); } } } public void Clear() { m_ShapeList.Clear(); if (null != m_Children) { for (int i = 0; i < m_Children.Length; ++i) m_Children[i].Clear(); m_Children = null; } } }
测试代码
using System; using System.Collections.Generic; using UnityEditor; using UnityEngine; public class MyQuadTreeTest : MonoBehaviour { public Transform m_ShapesRoot; public GameObject m_RectTemplate; [Range(0, 9)] public int m_ApiType = 1; public bool m_Benchmark = false; //测试调用多少次时, 执行耗时超过800ms [Range(0, 999)] public int m_TestShapeCount = 10; public int m_CostTime = 0; public int m_CheckCount = 0; private Vector3 m_PointCubeSize = new Vector3(0.1f, 0.1f, 0.01f); private List<OBBRect> m_RectList = new List<OBBRect>(); private HashSet<OBBRect> m_MouseIntersectRect = new HashSet<OBBRect>(); //SceneView下鼠标下方要标红的矩形 private MyQuadTree m_Tree; void Start() { m_Tree = new MyQuadTree(new Rect(-10, -10, 20, 20), 4, 4); for (int i = 0; i < m_ShapesRoot.childCount; ++i) { var shape = m_ShapesRoot.GetChild(i).GetComponent<OBBRect>(); if (null == shape || !shape.isActiveAndEnabled) continue; m_RectList.Add(shape); m_Tree.AddShape(shape); } } void Update() { for (int i = 0; i < 10; ++i) { if (m_RectList.Count >= m_TestShapeCount) break; CreateRect(); } switch (m_ApiType) { case 1: TreeCheckIntersect(); break; } CheckTimeCost(); } void TreeCheckIntersect() { m_Tree.Clear(); for (int i = 0; i < m_RectList.Count; ++i) { var shape = m_RectList[i]; if (m_MouseIntersectRect.Contains(shape)) shape.m_GizmosColor = Color.red; else shape.m_GizmosColor = Color.white; m_Tree.AddShape(shape); } var t = DateTime.Now; m_CheckCount = 0; for (int i = 0; i < m_RectList.Count; ++i) { var shape = m_RectList[i]; var intersectList = m_Tree.Query(shape.GetBounds()); if (null != intersectList) { for (int j = 0; j < intersectList.Count; ++j) { var shape_2 = intersectList[j] as OBBRect; if (null == shape_2 || shape == shape_2) continue; m_CheckCount++; if (Shape2DHelper.IsPolygonIntersect(shape.GetVerts(), shape_2.GetVerts())) { shape.m_GizmosColor = Color.red; shape_2.m_GizmosColor = Color.red; } } } } m_CostTime = (int)(DateTime.Now - t).TotalMilliseconds; } protected void CheckTimeCost() { if (m_CostTime >= 200) //防止卡住 { for (int i = 1; i <= 10; ++i) { var childIndex = m_ShapesRoot.childCount - i; if (childIndex < 0) break; m_ShapesRoot.GetChild(childIndex).gameObject.SetActive(false); } } if (m_Benchmark) { if (m_CostTime >= 100) { if (m_ApiType >= 2) { m_ApiType = 1; m_Benchmark = false; } else m_ApiType++; } else { if (m_RectList.Count >= m_TestShapeCount) { m_TestShapeCount++; } } } } private void CreateRect() { var go = GameObject.Instantiate(m_RectTemplate, m_ShapesRoot, false); go.SetActive(true); go.name = $"Rect ({m_RectList.Count})"; var trans = go.transform; trans.position = new Vector2(UnityEngine.Random.Range(-10, 10), UnityEngine.Random.Range(-10, 10)); trans.localEulerAngles = new Vector3(0, 0, UnityEngine.Random.Range(-30, 30)); var shape = go.GetComponent<OBBRect>(); shape.m_Width = UnityEngine.Random.Range(0.1f, 3f); shape.m_Height = shape.m_Width * UnityEngine.Random.Range(0.6f, 0.8f); m_RectList.Add(shape); m_Tree.AddShape(shape); } private void CreateRect2(Vector3 pos) { var go = GameObject.Instantiate(m_RectTemplate, m_ShapesRoot, false); go.SetActive(true); go.name = $"Rect ({m_RectList.Count})"; var trans = go.transform; trans.position = pos; trans.localEulerAngles = new Vector3(0, 0, UnityEngine.Random.Range(-30, 30)); var shape = go.GetComponent<OBBRect>(); shape.m_Width = 2; shape.m_Height = 1.5f; m_RectList.Add(shape); m_Tree.AddShape(shape); } #if UNITY_EDITOR private Stack<MyQuadTree> m_DrawStack = new Stack<MyQuadTree>(); private void OnDrawGizmos() { DrawGizmos_Tree(); } private void DrawGizmos_Tree() { if (null != m_Tree) { var curEvent = Event.current; var cam = Camera.current; if (null != cam) { Vector3 screenPos = HandleUtility.GUIPointToScreenPixelCoordinate(curEvent.mousePosition); //转换成像素单位以及左下角(0, 0) screenPos.z = -cam.transform.position.z; var worldPos = cam.ScreenToWorldPoint(screenPos); //Debug.Log($"mousePos:{curEvent.mousePosition} -> screenPos:{screenPos}, worldPos:{worldPos}"); float handleSizeFactor = HandleUtility.GetHandleSize(worldPos); var pointCubeSize = m_PointCubeSize * handleSizeFactor; Gizmos.DrawCube((Vector2)worldPos, pointCubeSize); var mousePosBounds = new Rect(worldPos.x - m_PointCubeSize.x * 0.5f, worldPos.y - m_PointCubeSize.y * 0.5f, m_PointCubeSize.x, m_PointCubeSize.y); var intersectList = m_Tree.Query(mousePosBounds); m_MouseIntersectRect.Clear(); if (null != intersectList) { for (int i = 0; i < intersectList.Count; ++i) { var shape = intersectList[i] as OBBRect; m_MouseIntersectRect.Add(shape); } } if (curEvent.type == EventType.MouseUp) //在鼠标位置添加一个矩形 { CreateRect2(worldPos); curEvent.Use(); } } var node = m_Tree; m_DrawStack.Push(node); do { node = m_DrawStack.Pop(); var c = Color.HSVToRGB(node.Depth / (float)node.MaxDepth, 1, 1); //c.a = 0.5f; Gizmos.color = c; DrawNodeBounds(node); for (int i = 0; i < 4; ++i) { var child = node.GetChild(i); if (null != child) m_DrawStack.Push(child); } } while (m_DrawStack.Count > 0); Gizmos.color = Color.white; } } private void DrawNodeBounds(MyQuadTree node) { var bounds = node.Bounds; //显示的时候, 左下角padding缩小一点, 不然线叠在一起看不清 var rootBounds = m_Tree.Bounds; float x = node.Depth * rootBounds.width * 0.003f; float y = node.Depth * rootBounds.height * 0.003f; bounds.xMin += x; bounds.yMin += y; var min = bounds.min; var max = bounds.max; var leftTop = new Vector2(min.x, max.y); var rightBottom = new Vector2(max.x, min.y); Gizmos.DrawLine(min, leftTop); Gizmos.DrawLine(leftTop, max); Gizmos.DrawLine(max, rightBottom); Gizmos.DrawLine(rightBottom, min); } #endif }
OBBRect类看这边:用AABBTree加速碰撞检测
参考
timohausmann/quadtree-js: A lightweight quadtree implementation for javascript (github.com)
quadtree-js Dynamic Demo (timohausmann.github.io)
快速检索碰撞图形:四叉树碰撞检测 - 知乎 (zhihu.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号