相交 - 圆与OBB矩形是否相交
1) 以矩形的中心作为原点,建立坐标系。
2) 算出矩形的旋转角度,然后将矩形和圆都旋转回去。

3) 就可以按照普通的圆与矩形是否相交来判断了。
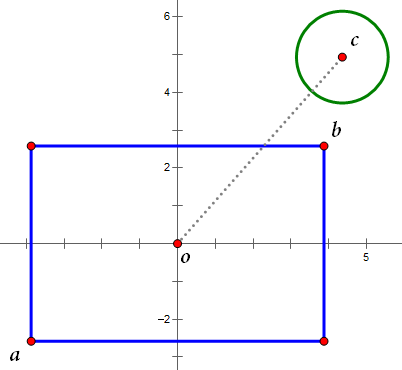
关于圆心旋转后的坐标计算

先求出oc与x轴的夹角,然后根据旋转角度就可计算出c'的坐标
c'.x = r * cos(θ+θ2), c'.y = r * sin(θ+θ2)
会用到的三角函数公式:
sin(θ+θ2)=sin(θ)*cos(θ2)+cos(θ)*sin(θ2)
cos(θ+θ2)=cos(θ)*cos(θ2)-sin(θ)*sin(θ2)
且已知:
c.x = r * cos(θ), c.y = r * sin(θ)
所以:
c'.x = r * cos(θ+θ2) = r*cos(θ)*cos(θ2) - r*sin(θ)*sin(θ2) = c.x*cos(θ2) - c.y*sin(θ2)
c'.y = r * sin(θ+θ2) = r*sin(θ)*cos(θ2) + r*cos(θ)*sin(θ2) = c.y*cos(θ2) + c.x*sin(θ2)
//圆与OBB矩形是否相交 public static bool IsCircleOBBIntersect(Vector2 a, Vector2 b, Vector2 d, Vector2 e, Vector2 c, float r) { var o = (d - a) * 2; //矩形中心点 //将矩形中心点作为原点建立坐标系 a -= o; b -= o; c -= o; var right = Vector2.right; var abNM = (b - a).normalized; var dot = Vector2.Dot(abNM, right); //cos(θ2) var cross = V2Cross(ref abNM, ref right); //sin(θ2) c = new Vector2(c.x * dot - c.y * cross, c.y * dot + c.x * cross); //不带旋转的圆心坐标 //不带旋转的矩形对角坐标 var halfSize = (d - a) * 0.5f; a = -halfSize; d = halfSize; //将圆转换到第一象限 c.x = Mathf.Abs(c.x); c.y = Mathf.Abs(c.y); //圆心到矩形的最短距离 var dc = c - d; dc.x = Mathf.Max(dc.x, 0); dc.y = Mathf.Max(dc.y, 0); //最短距离<=r, 则和矩形相交 return dc.sqrMagnitude <= r * r; }
参考
简易碰撞检测原理--图形相交测试_相交检测算法-CSDN博客

 浙公网安备 33010602011771号
浙公网安备 33010602011771号