


Mathematica操作
首先,优先使用系统内置函数实现,与此相关的内置函数包括Translate/TranslationTransform、Rotate/RotationTransform这几个常用的。每个函数在不同的场景下有不同的优势。
- 实例1:使用系统内置“动词”函数
(*使用系统内置“动词”函数*)
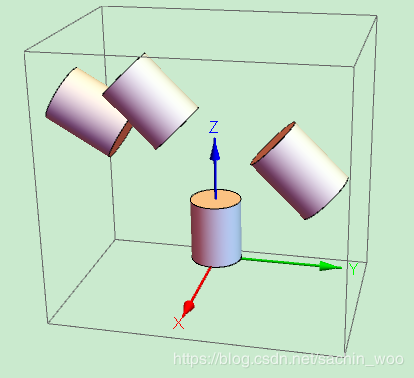
cube = Cylinder[{{0, 0, 0}, {0, 0, 0.5}}, 0.2]; (*生成一个圆柱体*)
cube1 = Rotate[Translate[cube, {1, 1, 1}], 45 Degree, {1, 0, 0}];
(*使用系统自带动作变换函数进行变换,先平移,再旋转*)
- 实例2:使用系统内置“名词”函数
(*使用系统内置“名词”函数*)
cube = Cylinder[{{0, 0, 0}, {0, 0, 0.5}}, 0.2]; (*生成一个圆柱体*)
cube2 = GeometricTransformation[GeometricTransformation[cube, TranslationTransform[{1, 1,1}]],
RotationTransform[60 Degree, {1, 0, 0}]];(*使用系统自带名词变换函数进行变换,先平移,再旋转*)
- 实例3:使用自定义函数
(*使用自定义函数*)
SetDirectory["Z:\Wushuichuan\05-计算仿真\基于Mathematica机器人仿真\Packages"];
<< Screws.m
transform[shape_, g_] := GeometricTransformation[shape, TransformationFunction[g]] (*定义图形变换函数*)
r = {{1, 0, 0}, {0, Cos[45 Degree], -Sin[45 Degree]}, {0, Sin[45 Degree], Cos[45 Degree]}}; (*定义一个绕X轴旋转45度对应的矩阵*)
p = {1, 1, 1}; (*生成一个平移向量*)
g = RPToHomogeneous[r, p]; (*生成一个4x4的变换矩阵*)
cube = Cylinder[{{0, 0, 0}, {0, 0, 0.5}}, 0.2]; (*生成一个圆柱体*)
cube3 = transform[cube, g]; (*使用自定义图形变函数进行变换*)
后记
- 以上每种方法在不同的场景均有不同的优势,要灵活运用,主要是函数参数的形式不一样。具体应用可以参考Wolfram参考资料。
- 注意系统内置动词性函数和名词性函数的区别,一般情况下,动词性 函数可单独使用,名词性函数要配合其它函数使用,如实例2中要配合GeometricTransformation函数使用。名词性函数只是产生了一个相应的变换矩阵,且告诉系统这不是一个一般的矩阵,这是一个变换用的矩阵。
- 实例3中的自定义函数和实例2中的名词性函数有相似之处,这个相似性与TransformationFunction有关,名词性变换函数产生的是一个变换矩阵,一般的变换矩阵不能直接用于变换,必须要由TransformationFunction函数来告知系统这是一个变换矩阵,经它处理后就可以当作GeometricTransformation的参数作为变换矩阵用于变换了。
