
OpenCV和opencv_contrib的编译
在做特征匹配等图像处理的项目时,需要用到SURF和ORB等特征提取算法,这就需要用到配置xfeatures.hpp头文件以及相应的库。但是这一模块3.0版本以后以opencv_contrib模块独立出来,所以在使用这一模块时,需要对其进行编译。下面介绍OpenCV及其相应的opencv_contrib的编译步骤。
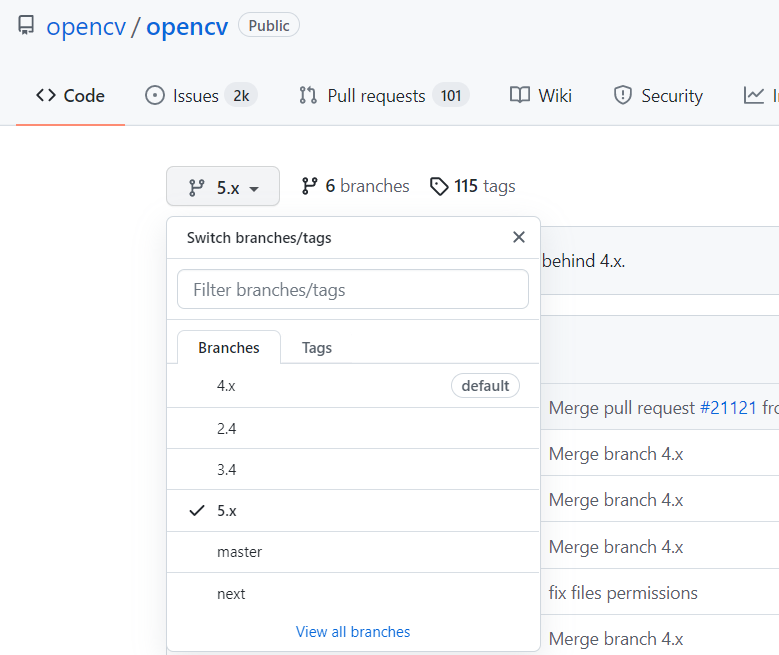
首先进入OpenCV的github网页:OpenCV · GitHub ,打开界面如下:

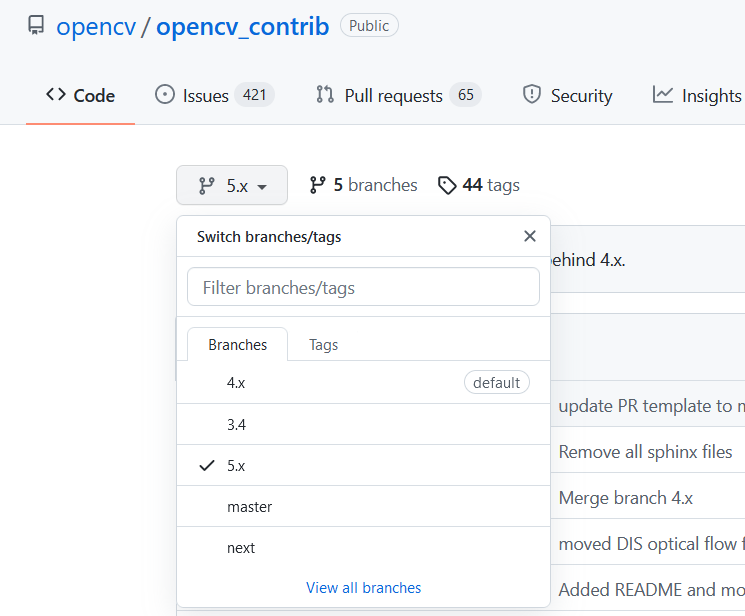
然后,分别点击opencv和opencv_contrib页面,并分别选择下载5.x版本的压缩包,下载页面如下:
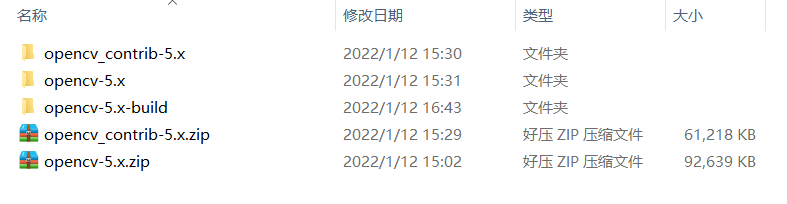
将两个下载好的压缩包解压到相应的文件夹下,然后新建build文件夹,存放编译的文件:
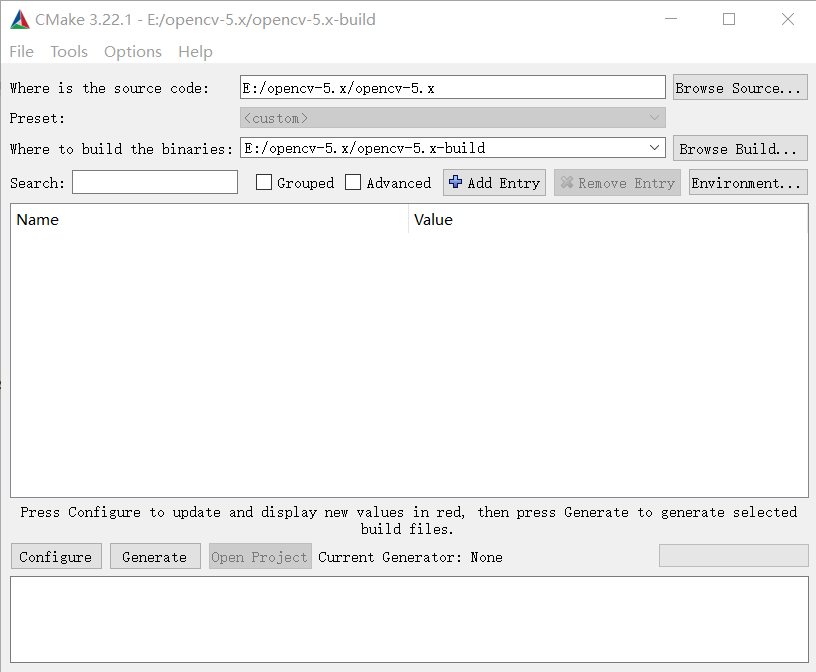
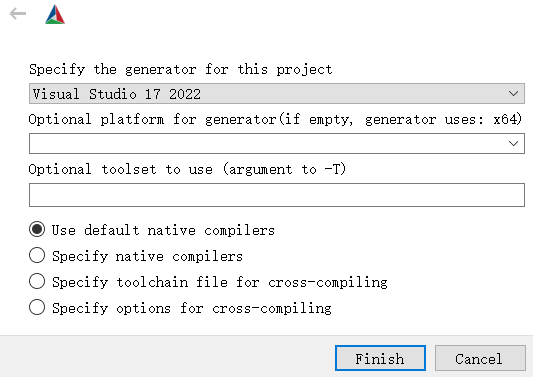
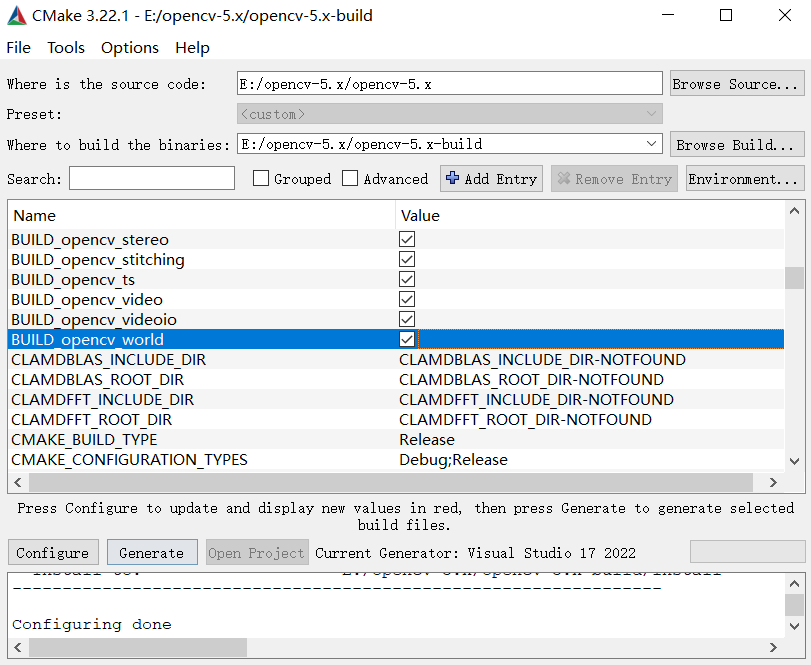
打开cmake,然后在Where is the source code一栏填入opencv-5.x源代码的目录,在Where to build the binaries一栏填入新建的opencv-5.x-build目录,选择Visual Studio 17 2022,点击Configure:
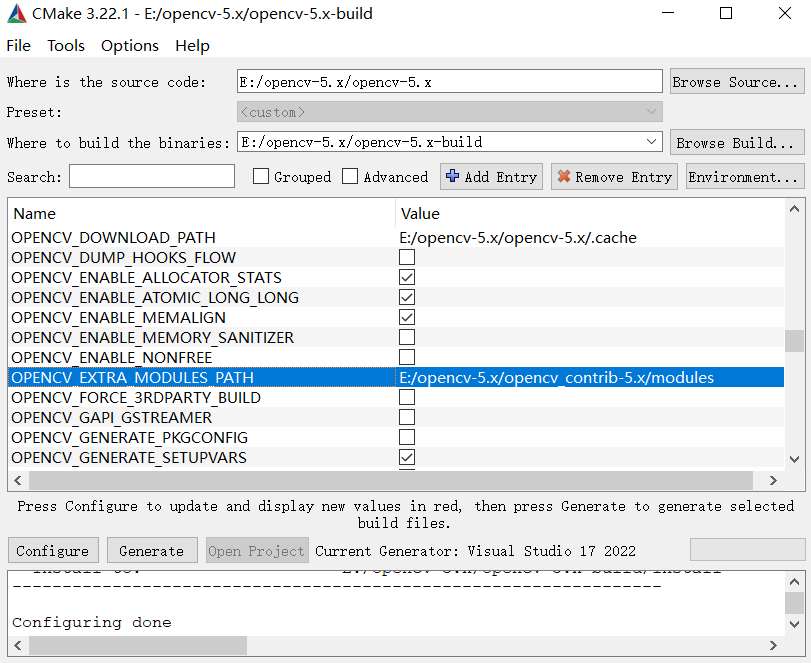
Configure完毕后,出现如下界面,需要在BUILD_opencv_world一栏打勾,在OPENCV_EXTRA_MODULES_PATH一栏填入opencv_contrib-5.x下面modules所在目录,然后点击Generate:
Generate完成后,在“目的路径”----opencv-5.x-build目录下找到OpenCV.sln文件:

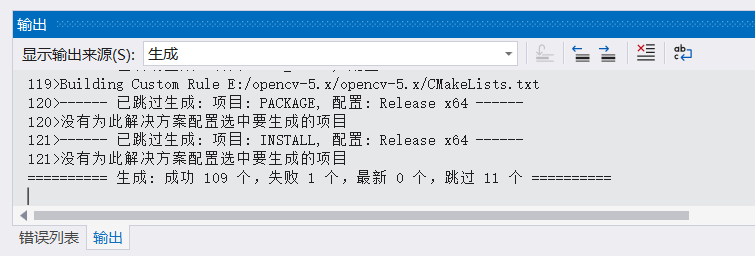
选择VS 2022打开该工程文件,选择Release x64,点击 生成 >>>生成解决方案,开始编译。编译结束后,结果如下:
然后,找到CMakeTargets目录,在INSTALL选型右键,选择 仅用于项目>>>仅生成INSTALL,即可编译生成dll相关文件,编译过程如下:
之后,就可以在项目属性里面编辑:在 VC++目录>>>包含目录 下填写:E:\opencv-5.x\opencv-5.x-build\install\include E:\opencv-5.x\opencv-5.x-build\install\include\opencv2
在 VC++目录>>>库目录 下填写:E:\opencv-5.x\opencv-5.x-build\install\x64\vc17\lib
在 链接器>>>输入>>>附加依赖项 中填写:opencv_world500.lib,则完成一个项目的配置。
下面以ORB匹配算法验证环境配置是否正确,实现ORB匹配算法的代码如下:
#include <opencv2\opencv.hpp> #include <opencv2\core\core.hpp> #include <opencv2\highgui\highgui.hpp> #include <opencv2\imgproc\imgproc.hpp> #include <opencv2\imgproc\types_c.h> #include <opencv2\xfeatures2d.hpp> #include <opencv2\xfeatures2d\nonfree.hpp> #include <cmath> #include <vector> using namespace cv; using namespace std; void main() { double start = static_cast<double>(getTickCount()); Mat src1, gray1, src2, gray2; src1 = imread("img_0.bmp"); src2 = imread("img_1.bmp"); cvtColor(src1, gray1, CV_BGR2GRAY); cvtColor(src2, gray2, CV_BGR2GRAY); morphologyEx(gray1, gray1, MORPH_GRADIENT, Mat()); morphologyEx(gray2, gray2, MORPH_GRADIENT, Mat()); vector<KeyPoint> keypoints1, keypoints2; Mat image1_descriptors, image2_descriptors; //采用ORB算法提取特征点 Ptr<ORB> orb = ORB::create(500); orb->setFastThreshold(0); orb->detectAndCompute(gray1, Mat(), keypoints1, image1_descriptors); orb->detectAndCompute(gray2, Mat(), keypoints2, image2_descriptors); BFMatcher matcher(NORM_HAMMING, true); //汉明距离做为相似度度量 vector<DMatch> matches; matcher.match(image1_descriptors, image2_descriptors, matches); sort(matches.begin(), matches.end()); Mat match_img; //保存匹配对序号 vector<int> queryIdxs(matches.size()), trainIdxs(matches.size()); for (size_t i = 0; i < matches.size(); i++) { queryIdxs[i] = matches[i].queryIdx; trainIdxs[i] = matches[i].trainIdx; } Mat H12; //变换矩阵 vector<Point2f> points1; KeyPoint::convert(keypoints1, points1, queryIdxs); vector<Point2f> points2; KeyPoint::convert(keypoints2, points2, trainIdxs); int ransacReprojThreshold = 5; //拒绝阈值 H12 = findHomography(Mat(points1), Mat(points2), cv::RANSAC, ransacReprojThreshold); Mat points1t; vector<char> matchesMask(matches.size(), 0); perspectiveTransform(Mat(points1), points1t, H12); int mask_sum = 0; for (size_t i1 = 0; i1 < points1.size(); i1++) //保存‘内点’ { if (norm(points2[i1] - points1t.at<Point2f>((int)i1, 0)) <= ransacReprojThreshold) //给内点做标记 { matchesMask[i1] = 1; mask_sum++; } } Mat Mat_img; drawMatches(src1, keypoints1, src2, keypoints2, matches, Mat_img, Scalar(0, 0, 255), Scalar::all(-1), matchesMask); imshow("result", Mat_img); imwrite("result.png", Mat_img); double time = ((double)getTickCount() - start) / getTickFrequency(); cout << "The running time is:" << time << "seconds" << endl; cout << "The feature points found in picture 1:" << keypoints1.size() << endl; cout << "The feature points found in picture 2:" << keypoints2.size() << endl; cout << "The match results found in total:" << matches.size() << endl; cout << "The correct match results:" << mask_sum << endl; waitKey(0); }
现有一幅可见光图像及其相应的红外图像,若要实现两者之间的配准,运行上述代码,可得如下匹配结果:



编译得到的opencv_contrib模块完全可以用于目标配准的代码之中,则说明编译的opencv_contrib模块是可行的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号