
python串口通信
串口通信是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式。这种通信方式使用的数据线少,在远距离通信中可以节约通信成本,但其传输速度比并行传输低。串口是计算机上一种非常通用的设备通信协议。pyserial模块封装了python对串口的访问,为多平台的使用提供了统一的接口。
安装:
pip3 install pyserial
测试:
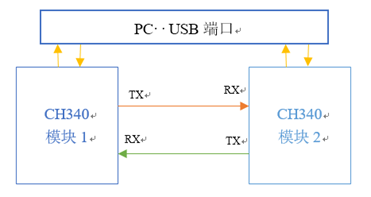
两个CH340 (TTL转串口模块)接入到PC串口上,通过Python进行数据交互:
简单串口程序实现:

1 import serial #导入模块
2 try:
3 #端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
4 portx="COM3"
5 #波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
6 bps=115200
7 #超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
8 timex=5
9 # 打开串口,并得到串口对象
10 ser=serial.Serial(portx,bps,timeout=timex)
11
12 # 写数据
13 result=ser.write("我是东小东".encode("gbk"))
14 print("写总字节数:",result)
15
16 ser.close()#关闭串口
17
18 except Exception as e:
19 print("---异常---:",e)
获取可用串口列表:
1 import serial #导入模块
2
3 import serial.tools.list_ports
4 port_list = list(serial.tools.list_ports.comports())
5 print(port_list)
6 if len(port_list) == 0:
7 print('无可用串口')
8 else:
9 for i in range(0,len(port_list)):
10 print(port_list[i])
十六进制处理:
1 import serial #导入模块
2 try:
3 portx="COM3"
4 bps=115200
5 #超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
6 timex=None
7 ser=serial.Serial(portx,bps,timeout=timex)
8 print("串口详情参数:", ser)
9
10 #十六进制的发送
11 result=ser.write(chr(0x06).encode("utf-8"))#写数据
12 print("写总字节数:",result)
13
14 #十六进制的读取
15 print(ser.read().hex())#读一个字节
16
17 print("---------------")
18 ser.close()#关闭串口
19
20 except Exception as e:
21 print("---异常---:",e)
其他细节补充:
1 import serial #导入模块
2 try:
3
4 #端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
5 portx="COM3"
6 #波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
7 bps=115200
8 #超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
9 timex=5
10 # 打开串口,并得到串口对象
11 ser=serial.Serial(portx,bps,timeout=timex)
12 print("串口详情参数:", ser)
13
14
15
16 print(ser.port)#获取到当前打开的串口名
17 print(ser.baudrate)#获取波特率
18
19 result=ser.write("我是东小东".encode("gbk"))#写数据
20 print("写总字节数:",result)
21
22
23 #print(ser.read())#读一个字节
24 # print(ser.read(10).decode("gbk"))#读十个字节
25 #print(ser.readline().decode("gbk"))#读一行
26 #print(ser.readlines())#读取多行,返回列表,必须匹配超时(timeout)使用
27 #print(ser.in_waiting)#获取输入缓冲区的剩余字节数
28 #print(ser.out_waiting)#获取输出缓冲区的字节数
29
30 #循环接收数据,此为死循环,可用线程实现
31 while True:
32 if ser.in_waiting:
33 str=ser.read(ser.in_waiting ).decode("gbk")
34 if(str=="exit"):#退出标志
35 break
36 else:
37 print("收到数据:",str)
38
39 print("---------------")
40 ser.close()#关闭串口
41
42
43 except Exception as e:
44 print("---异常---:",e)
部分封装:
其中读数据的封装方法并不是很好用,使用的话又得循环接收,这样反而更加复杂了
1 import serial #导入模块
2 import threading
3 STRGLO="" #读取的数据
4 BOOL=True #读取标志位
5
6 #读数代码本体实现
7 def ReadData(ser):
8 global STRGLO,BOOL
9 # 循环接收数据,此为死循环,可用线程实现
10 while BOOL:
11 if ser.in_waiting:
12 STRGLO = ser.read(ser.in_waiting).decode("gbk")
13 print(STRGLO)
14
15
16 #打开串口
17 # 端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
18 # 波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
19 # 超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
20 def DOpenPort(portx,bps,timeout):
21 ret=False
22 try:
23 # 打开串口,并得到串口对象
24 ser = serial.Serial(portx, bps, timeout=timeout)
25 #判断是否打开成功
26 if(ser.is_open):
27 ret=True
28 threading.Thread(target=ReadData, args=(ser,)).start()
29 except Exception as e:
30 print("---异常---:", e)
31 return ser,ret
32
33
34
35 #关闭串口
36 def DColsePort(ser):
37 global BOOL
38 BOOL=False
39 ser.close()
40
41
42
43 #写数据
44 def DWritePort(ser,text):
45 result = ser.write(text.encode("gbk")) # 写数据
46 return result
47
48
49
50
51 #读数据
52 def DReadPort():
53 global STRGLO
54 str=STRGLO
55 STRGLO=""#清空当次读取
56 return str
57
58
59
60 if __name__=="__main__":
61 ser,ret=DOpenPort("COM6",115200,None)
62 if(ret==True):#判断串口是否成功打开
63 count=DWritePort(ser,"我是东小东,哈哈")
64 print("写入字节数:",count)
65 #DReadPort() #读串口数据
66 #DColsePort(ser) #关闭串口

 浙公网安备 33010602011771号
浙公网安备 33010602011771号