

Qt Quick与ROS通过UDP协议实现网络通信
实现目标
项目需要编写一个无人机地面站,无人机在ROS系统下运行,地面站需要与无人机建立通信,能够控制无人机起飞、降落、飞行,并能够接收无人机的状态信息。
该无人机系统的组成如下图所示:

地面站通过无线网络与无人机上位机建立通信,上位机负责将飞控的无人机状态数据转发给地面站,并接收地面站的指令,再根据指令控制无人机执行相应的任务。该文章的目标就是构建图中网络通信的部分,首先以控制无人机起飞为例。
项目通过两部分实现:
1、在Qt Quick中重写QUdpSocket类,实现地面站发送UDP消息
2、在创建一个ROS节点,接收地面站的消息并控制无人机起飞
预备知识
1、了解UDP协议
无线通信网络通过UDP协议构建,UDP(用户数据报协议)是一种无连接的网络协议,UDP的主要特点包括无连接性、不保证可靠交付和面向报文的传输方式。由于UDP不建立连接,因此减少了开销和延迟,但同时也意味着它不保证数据的可靠传输。UDP适用于那些对实时性要求高,但可以容忍一定程度数据丢失的应用。
通俗的说,UDP通信类似于ROS中的话题,发送者只管往网络中不停发送消息,并不考虑是否有人接收以及接收者是否来得及接收;而接收者则是按照指定的频率不停接收网络中的消息。(与此相类比的,TCP协议则类似于ROS中的服务,这里暂不多提,后续若有用到再记录)
2、Qt Quick的使用
QML(Qt Meta-Object Language)是一种用于创建用户界面的声明性语言。它使用JSON格式的语法来描述用户界面,可以快速地创建出具有良好交互性和动画效果的应用程序。Qt Quick是一种用于编写应用程序的框架,在该框架中,开发者通过QML编写前端程序,通过C++编写后端程序。
在使用DUP协议搭建无线通信网络前,需要先掌握QML与C++的交互,这篇博客中有很详细的教程https://blog.csdn.net/xiezhongyuan07/article/details/109245920, 该项目中用到了“将C++类名注册到QML,并在QML声明一个对象并进行访问“的方法实现QML与C++的交互。
3、掌握ROS系统的使用
该项目的ROS系统在概念上分为了3部分,第一部分负责无人机仿真,第二部分运行飞控中的程序,第三部分负责运行上位机程序。该项目的核心在于搭建网络通信,这部分代码写在上位机程序中,因此只需掌握ROS的基本使用,就能完成无线网络的搭建;但若要完成的实现该项目,还需了解PX4无人机及其offboard模式,详细内容可在PX4官网(https://docs.px4.io/main/zh/ros/mavros_offboard_cpp.html)或该博客(https://blog.csdn.net/weixin_45031928/article/details/135142557)学习。
在Qt Quick中发送UDP消息到网络
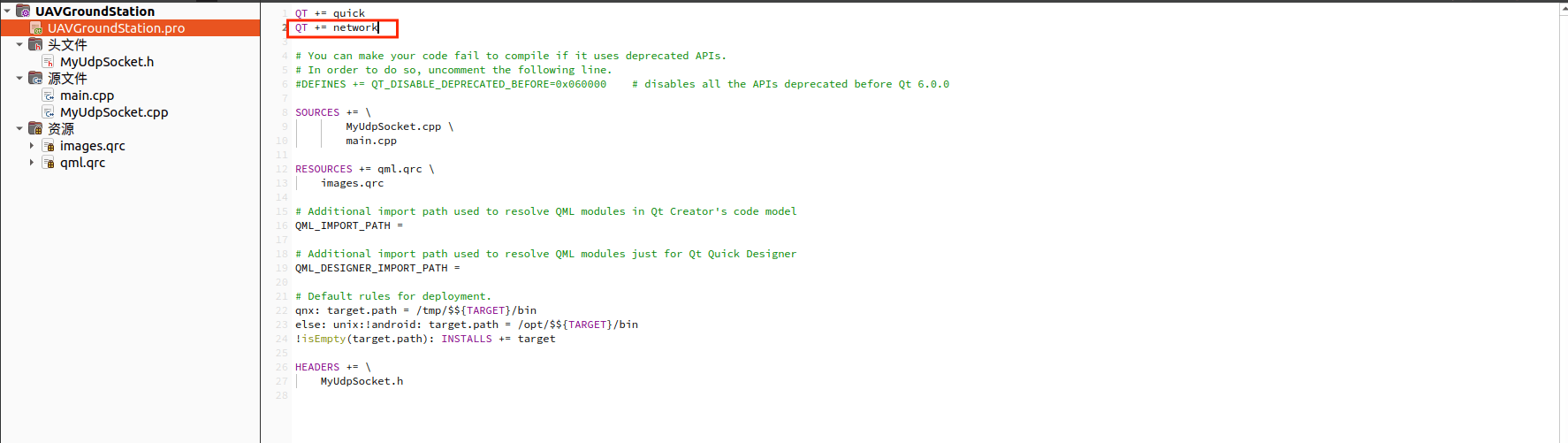
首先在.pro文件中的头部添加Qt += network,指定当前项目使用网络模块。
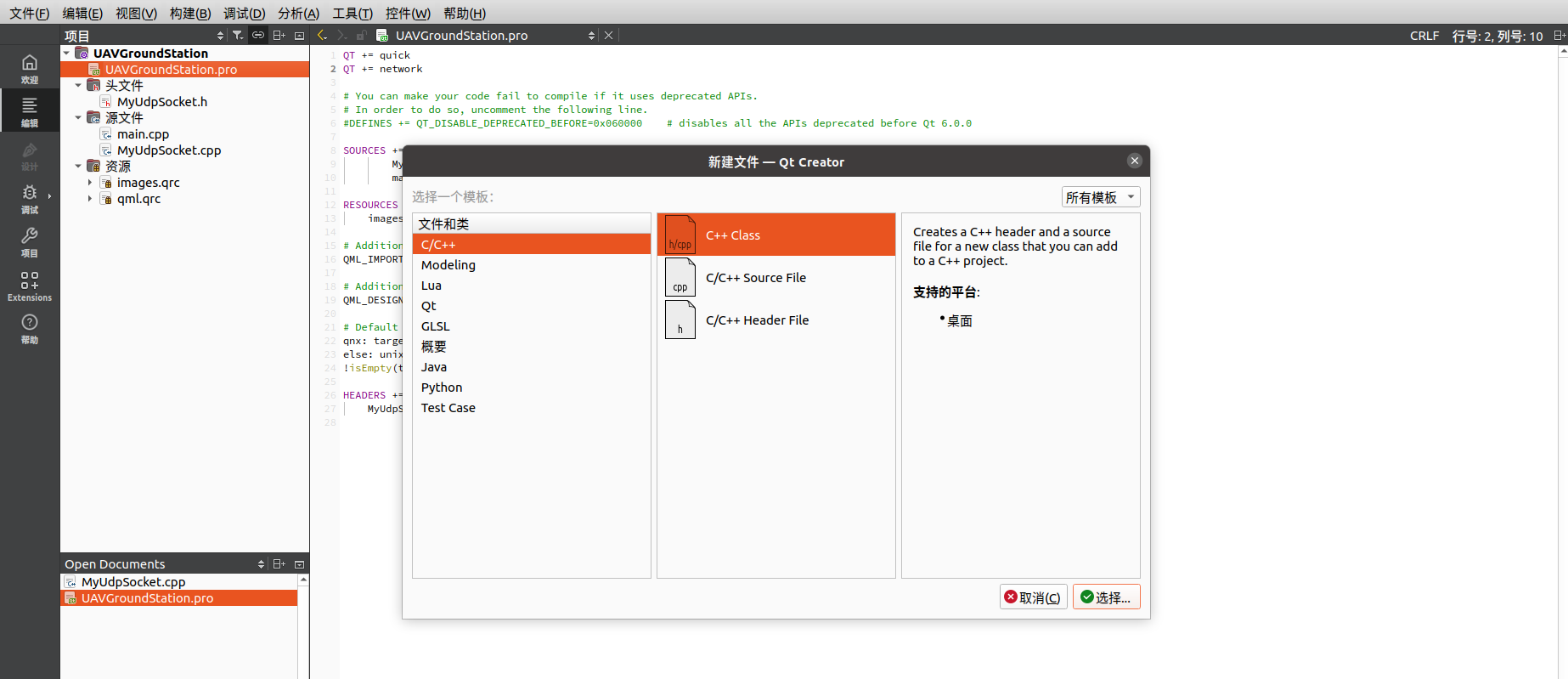
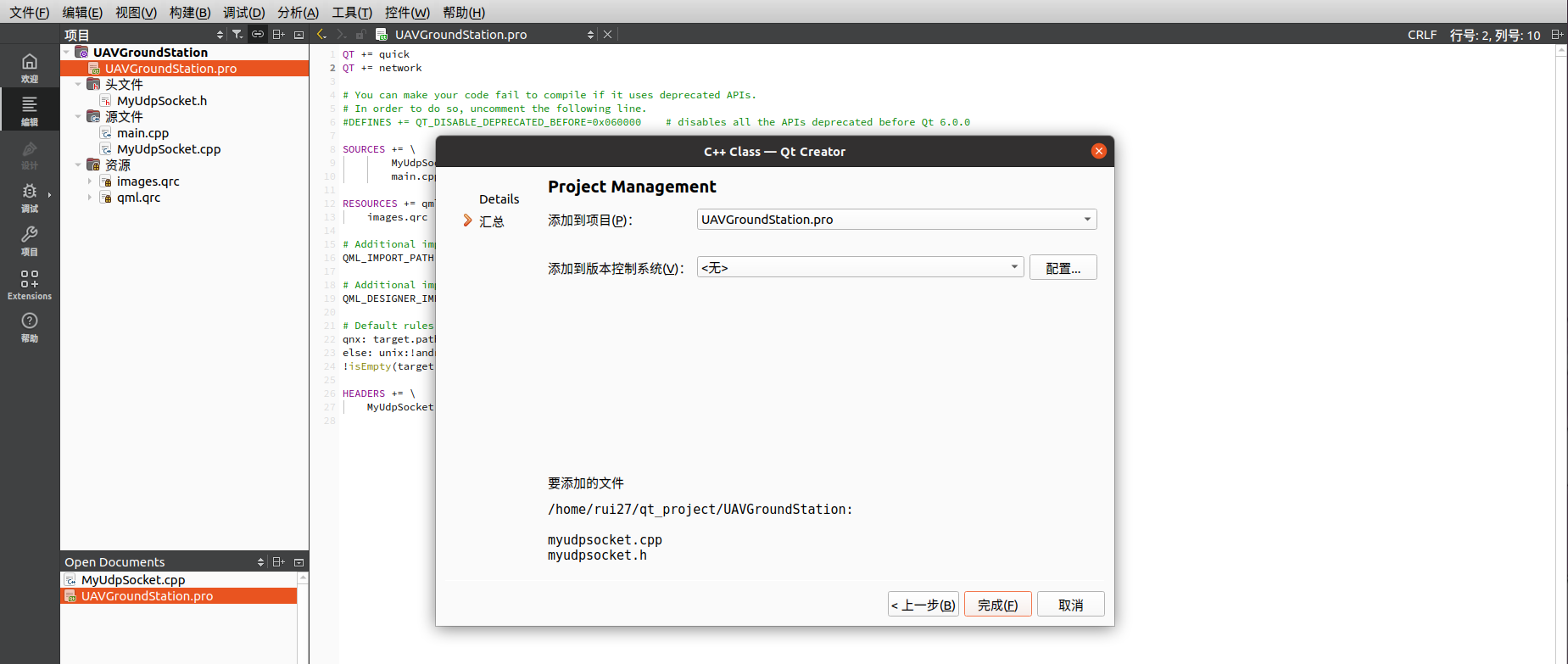
随后在左侧项目栏右键添加新的文件,按如下截图创建新的C++文件:
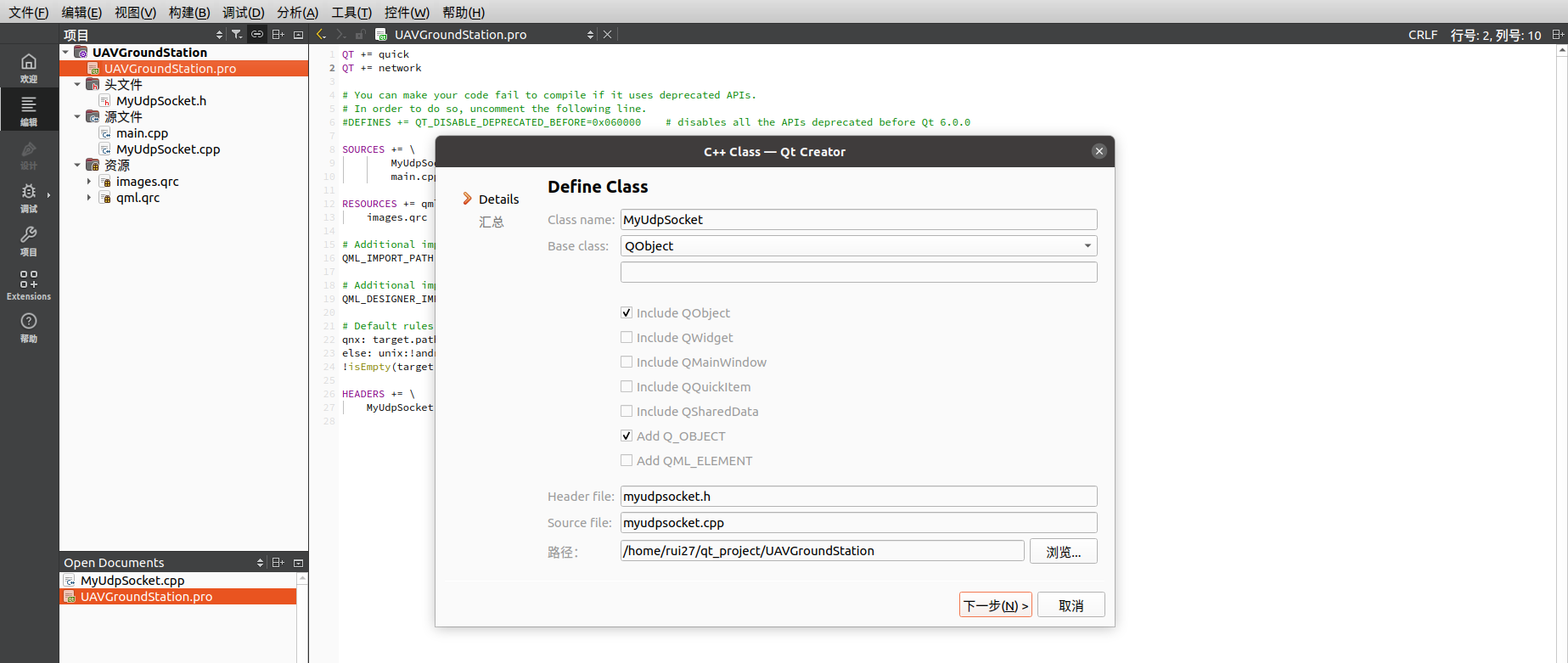
创建完C++文件后我们需要引入QUdpSocket类,并在此基础上定义我们自己的类,来完成发送UDP消息的任务。

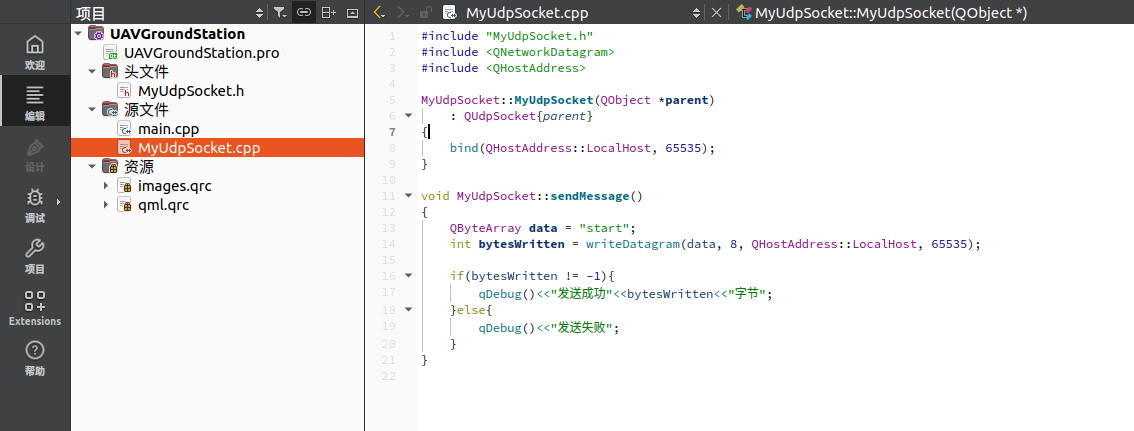
下面贴上代码和各部分的注释
#ifndef MYUDPSOCKET_H
#define MYUDPSOCKET_H
#include <QObject>
#include <QUdpSocket> //引入QUdpSocket库
//重写定义自己的MyUdpSocket类,继承自QUdpSocket
class MyUdpSocket : public QUdpSocket
{
Q_OBJECT //编译器会编译带有Q_OBJECT宏的C++类,且该宏声明了一些成员函数,以实现信号和槽的功能
public:
explicit MyUdpSocket(QObject *parent = nullptr);
Q_INVOKABLE void sendMessage(); //Q_INVOKABLE标识可以将该函数暴露给QML语言,在QML编程时可以直接使用该函数
signals: //定义一些信号,在调用该类的时候会发送这些信号,例如我们常用的onClicked信号和onCompeled信号
};
#endif // MYUDPSOCKET_H
#include "MyUdpSocket.h"
#include <QNetworkDatagram> //该库中的函数用来发送UDP消息
#include <QHostAddress> //该库用来获取主机ip地址
//在构造函数中绑定本机的ip地址,并设置端口号为65535
MyUdpSocket::MyUdpSocket(QObject *parent)
: QUdpSocket{parent}
{
bind(QHostAddress::LocalHost, 65535);
}
//sendMessage函数用于发送UDP消息
void MyUdpSocket::sendMessage()
{
QByteArray data = "start";
int bytesWritten = writeDatagram(data, 8, QHostAddress::LocalHost, 65535); //writeDatagram用于发送UDP消息,4个参数分别是:发送的数据、字节数、ip地址、端口号(发送失败返回-1)
if(bytesWritten != -1){
qDebug()<<"发送成功"<<bytesWritten<<"字节";
}else{
qDebug()<<"发送失败";
}
}
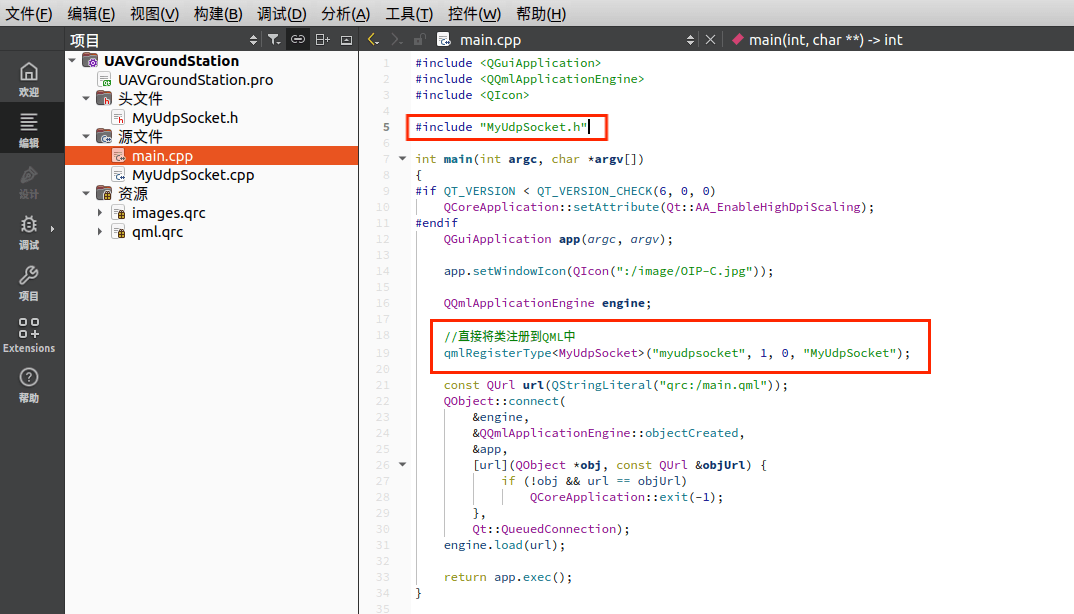
最后在main.cpp中包含MyUdpSocket.h文件,并添加上qmlRegisterType<MyUdpSocket>("myudpsocket", 1, 0, "MyUdpSocket");,便能够在QML文件中定义MyUdpSocket类的对象了。
下图展示了在QML文件中定义MyUdpSocket类的对象,并在在按下按钮时发送起飞消息的程序

Qt Quick部分的内容就此完成
在ROS节点中接收UDP消息
在offboard模式下控制PX4无人机起飞的代码中添加上接收UDP消息的部分(星号注释之间的为添加的内容),完整代码和注释如下:
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo Classic SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <stdio.h> //包含所需的库函数
#include <unistd.h>
#include <stdlib.h>
#include <sys/socket.h>
#include <sys/stat.h>
#include <string.h>
#include <arpa/inet.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
geometry_msgs::PoseStamped current_pos;
void pos_cb(const geometry_msgs::PoseStamped::ConstPtr& msg){
current_pos = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
/*******************************************************************************/
int fd = socket(AF_INET, SOCK_DGRAM, 0); //创建socket嵌套字(socket类似于单片机里的收发缓存区?大概),AF_INET是IPV4协议簇,SOCK_DGRAM指UDP数据报
if(fd == -1){
perror("socket error");
exit(1);
}
struct sockaddr_in serv; //创建sockaddr_in类型的服务器结构体serv,该结构体包含四个成员:地址类型sin_family、端口号sin_port、IP地址sin_addr、填充字节sin_zero
memset(&serv, 0, sizeof(serv)); //将结构体中的数据清零
serv.sin_family = AF_INET;
serv.sin_port = htons(65535);
serv.sin_addr.s_addr = htonl(INADDR_ANY); //INADDR_ANY参数表示绑定到所有可用的IP地址上
int ret = bind(fd, (struct sockaddr*)&serv, sizeof(serv)); //绑定结构体,传入参数分别是:socket返回值、结构体地址、结构体长度
if(ret == -1){
perror("bind error");
exit(1);
}
struct sockaddr_in client; //创建客户端结构体
socklen_t cli_len = sizeof(client);
char buf[1024] = {0}; //创建接收数据缓存数组
int start = 0;
/*******************************************************************************/
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Subscriber local_pos = nh.subscribe<geometry_msgs::PoseStamped>
("mavros/local_position/pose", 10, pos_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped target_pose;
target_pose.pose.position.x = 0;
target_pose.pose.position.y = 0;
target_pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(target_pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
/*******************************************************************************/
if(start == 0){
int recvlen = recvfrom(fd, buf, sizeof(buf), 0, //当没有接收到数据时,程序在此阻塞;当接收到数据时,将客户端接收到的数据存入buf中,并将start置1,开始运行后续的起飞程序
(struct sockaddr*)&client, &cli_len);
if(recvlen == -1){
perror("recvform error");
exit(1);
}
printf("received data: %s\n", buf);
start = 1;
}
/*******************************************************************************/
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(target_pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
下面的部分具体展示了sockaddr_in类型结构体的成员
struct sockaddr_in{
unsigned short sin_family;
unsigned short int sin_port;
struct in_addr sin_addr;
unsigned char sin_zero[8];
};
ROS部分的程序就此修改完成
运行
按照顺序运行PX4仿真程序,打开QGC地面站,再启动刚刚编写的ROS节点,运行Qt程序,点击起飞按钮,可以看见无人机开始缓缓起飞。

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步