K-D Tree
\(K-D \ \ Tree\)
直译为K维树
如果认为我讲的不清楚可以去看 cmd 的博客
0x0 你要知道的
二叉搜索树的建树方式,替罪羊树的重构思想,快速排序的思想,还有简单的搜索剪枝,主定理(分析复杂度时要用),线段树之类的数据结构。
不知道也没关系
0x1算法流程
建树
首先我们来看看低维的 K-D Tree
一维的K-D Tree
因为点都在数轴上,它其实就是二叉搜索树。
我们找到区间的某个点,以该节点为此子树的根节点,然后向左右子树递归即可。
如下图,它就是一棵二叉搜索树

二维的K-D Tree
二维的 K-D Tree 我们也如一维那样构建,可是点不在数轴上了,那么我们怎么比较两个点呢?
我们任意选一条横线或数线,将平面分为两个部分,一边的是左子树,另一边的是右子树,递归即可。
举个栗子
如下图
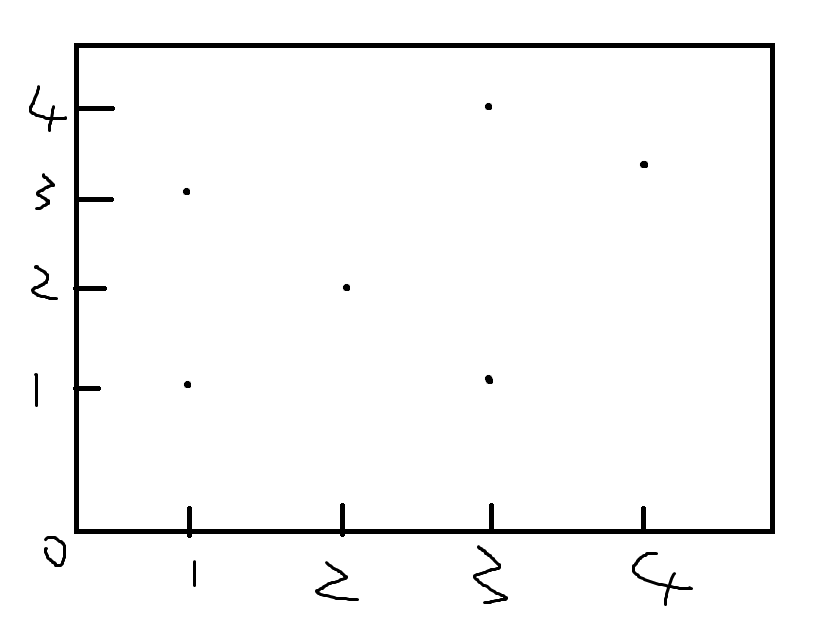
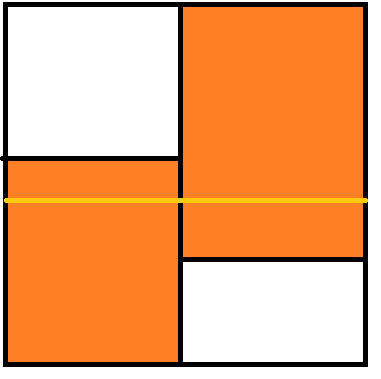
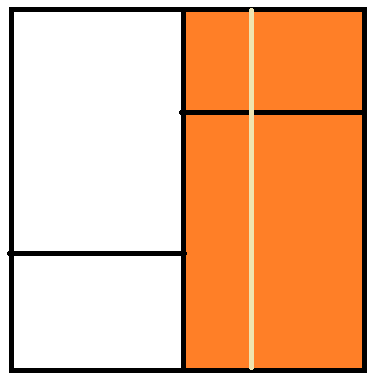
我们选择一个点,做一条经过这个点的竖线将平面分割成两部分
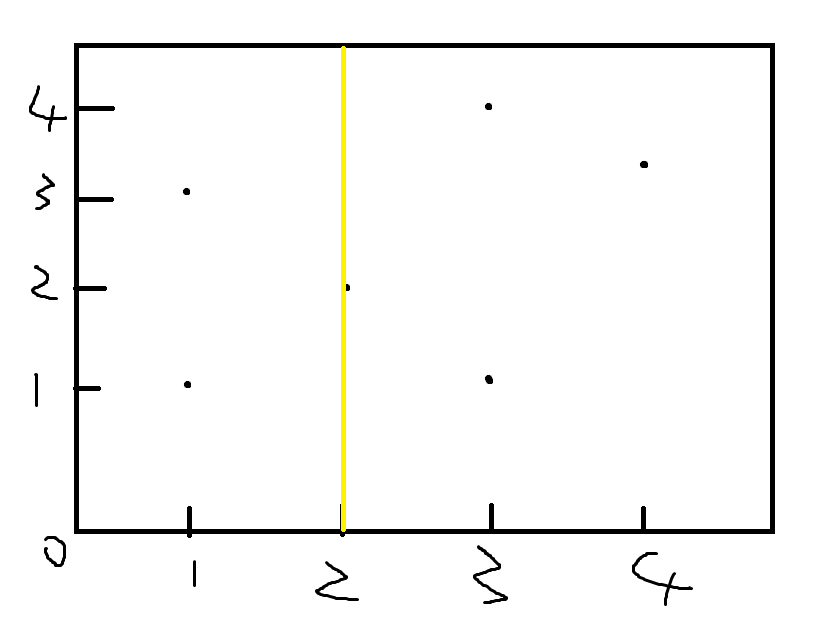
再在左右儿子各选一个点,画出两条横线
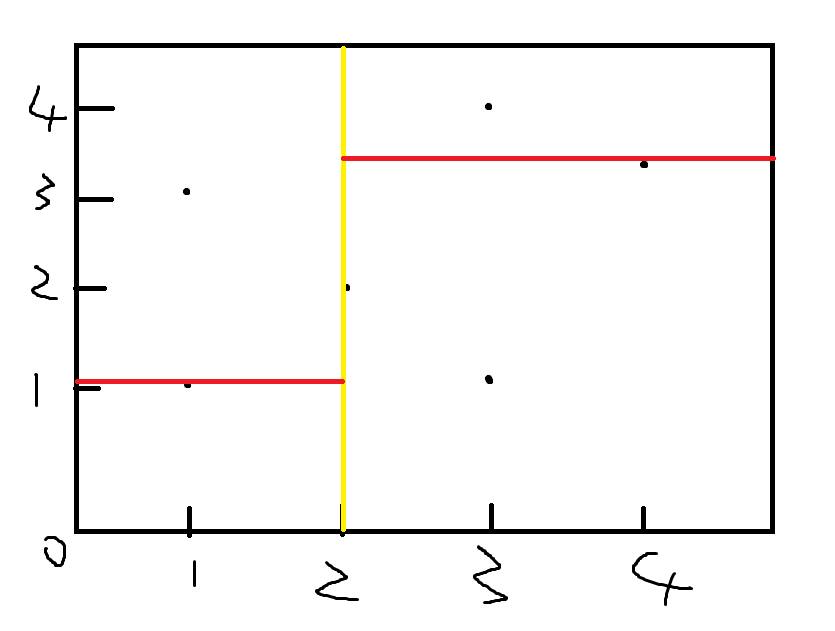
再在儿子的儿子中做一遍
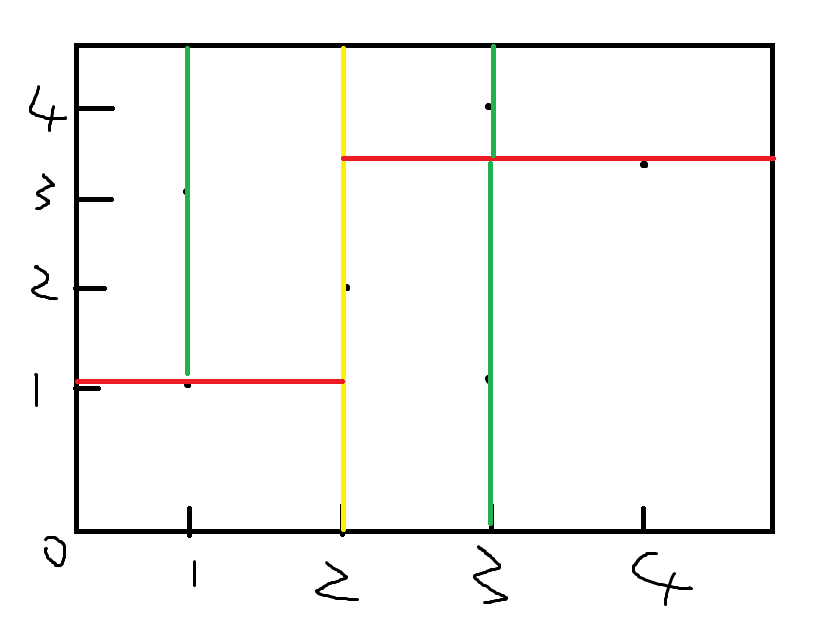
建出来的树大概长这样:

为了让这棵树是平衡的,我们每次都选点的中位数进行分割。如果每次 sort 一遍是 \(O(nlogn)\) ,最后建树的总复杂度是 \(O(nlog^2n)\) 的,显然就是逊啦不是很优秀。
考虑快速排序的本质,就是将一个数比它小的放左边,比它大的放右边,然后递归下去,这个是 $O(nlogn) $的操作,但是由于 K-D Tree 只要求要中位数在排序后正确的位置上,所以我们只需要递归排序包含中位数的 一侧,可以证明,这个复杂度是 \(O(n)\) 的。实现可以用 STL 的 nth_element
代码
struct kdTree {
int ls,rs;
int mn[2],mx[2];
int val;
} tr[N];
int dim,g[N],add[N],mult[N];
bool cnp(point a,point b) {
return a.pos[dim]<b.pos[dim];
}
bool cmp(int a,int b) {
return cnp(s[a],s[b]);
}
int build(int l,int r,int d) {
if(l>r) return 0;
int mid=(l+r)>>1;
dim=d;
nth_element(g+l,g+mid,g+r+1,cmp);
tr[g[mid]].val=s[g[mid]].val;
tr[g[mid]].ls=build(l,mid-1,d^1);
tr[g[mid]].rs=build(mid+1,r,d^1);
pushup(g[mid]);
return g[mid];
}
这里有一个大小优化。
- 选择的维度要满足其内部点的分布的差异度最大,即每次选择的切割维度是方差最大的维度。
代码
int build(int l,int r,int d) {
if(l>r) return 0;
double avx = 0, avy = 0, vax = 0, vay = 0;
for (int i = l; i <= r; i++)
avx += s[i].pos[0], avy += s[i].pos[1];
avx /= (double)(r - l + 1);
avy /= (double)(r - l + 1);
for (int i = l; i <= r; i++)
vax += (s[i].pos[0] - avx) * (s[i].pos[0] - avx),
vay += (s[i].pos[1] - avy) * (s[i].pos[1] - avy);
if (vax >= vay)
dim = 0;
else
dim = 1;
int mid=(l+r)>>1;
nth_element(s+l,s+mid,s+r+1,cmp);
tr[mid].ls=build(l,mid-1,d^1);
tr[mid].rs=build(mid+1,r,d^1);
pushup(mid);
return mid;
}
更高维K-D Tree
像二维那样,每次比较各维的权值大小,选择点的中位数,用一个K维的超平面将K维超长方体分为两部分,再递归到子树去做。
插入&删除
由于 K-D Tree 的特殊构造方式,它不能像 Splay 那样旋转来维持平衡,FHQ 的随机优先级也不能保证其复杂度,保持其平衡的手段只有类似于替罪羊树那样的重构思想。
定义一个平衡因子 \(\alpha\) (俏佳人一般都取 \(0.7\) 或 \(0.8\) ),对于每个节点 \(x\) 如果它的任意一个字数的大小占总数的占比大于 \(\alpha\) 时就认为它不平衡,就重构,具体过程就是遍历整棵子树,将子树还原成一个序列,再构建一棵 K-D Tree 代替原来的子树。
在插入一个K维点时,通过之前建树的信息判断是因该走到左子树还是右子树,走到叶子节点的时候回溯,维护子树的信息,判断子树是否平衡并重构。
删除操作使用惰性删除,即删除一个节点是打标记,而保留其带 K-D Tree 上的位置,这样当未删除的节点树占比小于 \(\alpha\) 时,也需重构。
这样,带插入操作的 K-D Tree 的树高仍是 \(O(logn)\) 的。
详细证明参考替罪羊树的复杂度证明。
直接抄
查询
根据题意搜索即可。
近邻查询可以被卡到 \(O(n)\),但在随机情况下似乎是 \(O(logn)\) 的,我并没有找到我看得懂的证明。
已经证明,在2-D Tree 上查询矩阵覆盖操作,如果已覆盖的矩阵不被查询,最优是 \(O(\log {n})\) 的,最坏是 \(O(\sqrt{n})\) 的,将结论拓展到 K 维的情况,最坏是 \(O(n^{1-\frac{1}{k}})\) 的。
关于 2-D 矩阵查询的复杂度的证明:
我们将查询矩阵分为三类:
- 与节点矩阵无交集(即 \(S_{node} \cap S_{query} = \oslash\))
- 与节点矩阵是被包含与包含的关系 (即 \(S_{query} \sub S_{node}\))
- 有交集 (即 \(S_{node} \cap S_{query} \neq \oslash\))
前两种显然就直接返回了,并且前两种的子树也不会出现第三种。
所以影响复杂度的就是第三种矩阵。
我们考虑将询问看成划分 \(x,y\) ,在相邻的两轮中,分别对 \(x,y\) 划分了一次。
对于矩形的每条边,分别计算其“穿过”的节点个数,这就是需要访问的节点数。
可以发现,每次我们将整个点集均分成了大小为 \(\frac{n}{4}\) 的四份,每条直线最多经过两份。
时间复杂度:\(T(n)=2T(\frac{n}{4})+O(1)\)。
根据主定理,\(T(n)=O(n^{log_{4}2})=O(n^{\frac12})=O(\sqrt{n})\)
将结论拓展至 \(K\) 维(\(K>2\))。
我们进行 \(K\) 次划分,那么点集被划分成 \(2^{k}\) 份,一条线最多可以被截到 \(2^{k-1}\) 份。
时间复杂度就是 \(T(n)=2^{k-1}T(\frac{n}{2^{k}})+O(1)=O(n^{log_{2^{k}}2^{k-1}})=O(n^{1-\frac{1}{k}})\)。
邻值查找代码
void querymin(int u,int x) {
if(!u) return;
if(u!=x) ansmin=min(ansmin,dist(tr[u].x,a[x]));
double disl=fmin(tr[u].ls,a[x]),disr=fmin(tr[u].rs,a[x]);
if(disl<ansmin&&disr<ansmin) {
if(disl<disr) {
querymin(tr[u].ls,x);
if(ansmin>disr) querymin(tr[u].rs,x);
}
else {
querymin(tr[u].rs,x);
if(ansmin>disl) querymin(tr[u].ls,x);
}
} else {
if(disl<disr) {
querymin(tr[u].ls,x);
if(ansmin>disr) querymin(tr[u].rs,x);
}
else {
querymin(tr[u].rs,x);
if(ansmin>disl) querymin(tr[u].ls,x);
}
}
}
总结
K-D Tree 在很多方面都不如 CDQ ,实现难度,时间复杂度等,但是在某些毒瘤题要求强制在线还卡空间时,你就不能快乐的使用 CDQ,也不能写树套树,(毕竟线性空间的数据结构谁不爱?),而且,只要是能转化为二维或高维的问题,KDT 都能搞,十分灵活。
0x2作用(含例题和习题)
例题都是自己觉得有代表性的,自己写的。
习题一般和例题做法类似,或者比较套路,欢迎大家来切,一般不放代码(因为我不一定写)。
其实例题都是我要贺 TJ 的,习题都是我看了就能口胡出来的
最大最小距离查询
例题[SDOI2012]最近最远点对
搜索时判断到矩阵边界的距离是否大于或小于答案,如果都大于要先遍历那个大的,在决定要不要遍历另一个。否则就如果有比答案小的就哪个比答案大就遍历哪个。
第K大查询
例题[CQOI2016]K 远点对
用类似于 \(A^*\) 的方法,定义一个估价函数为矩阵的边界到该点的最大距离,据此使用 \(A^*\) 即可(深度优先)。
习题
二维(或多维)数点问题
例题简单题
修改操作可视为插入一个点,插入时,根据这个点的坐标和树上节点的信息进行搜索,找到合适的地方就插进去,每次回溯都要更新(新插入的节点也要更新信息),不平衡时记得重构。
例题[Ipsc2015]Generating Synergy
考虑转换
我们发现,子树对于 \(dfn\) 的一段区间,距离不超过 \(l\) 对应 \(dep\) ,的一段区间,那么我们珂以以把树上每一个节点抽象成一个坐标为 \((dfn_{i},dep_{i})\) 的一个点,矩阵修改,单点查询即可。
例题[AHOI2008]矩形藏宝地
数点问题用烂的 trick。
我们把每个矩阵看作是一个坐标为 \((x1,x2,y2)\) 权值为 \(y1\) 的点,不难发现题目的条件就是对于每个 \((x1,x2,y2)\) 找到坐标为 \((px1,px2,py2)\) ,权值为 \(py1\) 满足 \(x1 \le px1 \ \ px2 \le x2 \ \ py2 \le y2 \ \ y1 \le py1\) 的点的个数。
三维的KDT时间复杂度明显不太够,我们把 \(x1\) 排个序,动态加点,就转化为了一个二维数点问题
代码就咕了
例题崂山白花蛇草水
矩阵查询想到 K-D Tree,第K大因为不能用堆(数据限制),所以想到权值线段树 or 主席树。
外层动态开点权值线段树查询第 K 大,内层 K-D Tree ,查询在矩阵中大于x的点的个数。
时间复杂度 \(O(q\sqrt{q}\log w)\)。
以上都是口胡
好了正戏开始。
显然这个复杂度需要卡常,那怎么办呢?
例题[Ynoi2008] rrusq
大毒瘤
用了个叫根号平衡的东西。
\([l,r]\) 区间内的矩阵是不太好维护的,考虑用一种类似于扫描线的方式离线做。
我们枚举每个 \(r_i\) ,它和 \(l_i\) 的答案显然是一个后缀和,每次用 kdt 给矩阵打标记,然后统计后缀和。
但是,我们肯定会遇到一个点同时被两个不连续的矩阵包含,这个时候就要涉及到撤销。
我们维护两个 tag(kdt 上的),一个是打上标记的 tag,另外一个是清除的 tag(详情见代码)。
这样每次修改之前把子树清空(打 lazy tag),这样每次时间复杂度仍然是 \(O(\sqrt{n})\)。
考虑对每个 \(r_i\) 标记的维护。
因为可能涉及到清空矩阵时要对前面的 \(r\) 的标记进行修改,所以我们要用一种支持单点修改 \(O(m\sqrt{n})\) 次和 \(O(q)\) 次查询的数据结构,直接用 \(O(1)-O(\sqrt{m})\) 的分块即可。
这样,总的时间复杂度就是 \(O(q\sqrt{m} + m\sqrt{n})\) 。
习题
偏序问题
例题[CH弱省胡策R2]TATT
很显然这是一个四维的偏序问题,我们按第一维排个序,就变成了最长上升子序列问题。
还是把DP式子摆一下
\(f[i]=max(f[j])+1(b[j]<=b[i],c[j]<=c[i],d[j]<=d[i]) \\ ans=max(f[i])\)
这是 \(O(n^2)\) 的,废话。
很显然是个三维偏序问题,辣么我们就可以用 cdq。
咳咳我们这里介绍的是 K-D Tree ,那我们就用 K-D Tree 写。
每次先查询已插入的点的答案,将其加一后插入到K-D Tree当中,再更新 ans 。
查询时要先判断是否在查询范围内,答案是否更优等。
例题寻找宝藏
大体和上题差不多,多了个求方案数,如果你不会那只能回炉重造
再把式子摆一下
\(f[i]=max(f[j])+v[i] \\ ans1=max(f[i]) \\ g[i]= \begin{cases} \sum_{j=1}^{i} g[j] \ (f[j]=max_{k < i}(f[k])) \\ 1 \ else \end {cases} \\ ans2=g[n]\)
然后呢,然后呢就记录每个节点所管辖的范围内最大值出现的次数,查询时,判断该节点的最大值是否大于答案,如果大于就更新答案,方案数改为该节点最大值出现的次数,否则就判断该节点最大值是否等于答案,如果等于就将方案数加上该节点最大值次数。记得在开头有适当的剪枝(同上题一样)。
习题
KDT 分治
我们简单说一下线段树分治。
当每个修改影响的询问是一个区间时,我们就可以将询问建成线段树,然后把每个修改 cover 到 \(logn\) 个询问区间上,最后在线段树上一次 dfs 就可以求出答案。
如果要做就去把 Dash Speed 多敲几遍。
KDT 分治和线段树分治基本相似,但因为 KDT 不是一个 Leafy 的数据结构,所以我们对于每个节点要记两个信息——子树矩阵的和该节点的,因为你有可能只能 cover 到这个点而不能 cover 到它的子矩阵。
例题[HNOI2016]最小公倍数
简化一下题意,给你一个 \(n\) 个点 \(m\) 条边的无向图,每条边边权是一个二元组 \(a,b\) 。
现在给出 \(q\) 组询问,每个询问是 \(u,v,x,y\) 询问 \(u,v\) 是否存在一条简单路径使得路径上的最大的 \(a\) 值和最大的 \(b\) 值是否分别为 \(x,y\)。
其实有高级的分块做法,但我只会KDT。
我们考虑一维怎么做,也就是边是 \(u,v,a\) 怎么做。
对于一条边的边权 \(a\),它能影响到的询问一定是值域上的一段前缀,同样,我们每一个询问是对的的条件必定是一段后缀,我们把这个后缀拆成 \(log\) 个区间,然后将每条边 cover 到线段树上,然后一边 dfs 求答案即可。
二维的话,一个询问成立的条件就是 \((a,b)\) 的右上部分,KDT 分治即可。
注意,在求答案的过程中,对于每一个非叶子节点,我们做完之后一定要撤销操作,具体实现看代码,就是一个带撤销并查集。
nboj 上有点卡常。
例题[PA2011]Kangaroos
题意不是一句两句能说清楚的。至少 syk 花了半天才懂
给你一个由区间组成的序列 \(A\),每次询问一个 \([a,b]\) ,求 \(A\) 中最长的一段使得这一段的每一个区间都与 \([a,b]\) 有交。
怎么做?
暴力怎么做,暴力是不是枚举序列 \(A\),开一个 \(cnt\) 记录长度,如果区间 \([a,b]\) 与这个元素有交,\(cnt++\),不然 \(cnt\) 就清零。
时间复杂度 \(O(nm)\)。
考虑将区间看成点,那么没有交集的区间就是两个矩阵(具体还要你自己手动模拟去找)。
考虑对询问分治,我们将询问建成 KDT,然后将每一个区间在 KDT 上 cover。
现在你要维护的操作就是下面两个:
- 将子树的权值清空
- 将子树的权值加一
最后记录每个点的历史最大值就是每个节点的答案。
具体实现本人贺参考了一篇 TJ(@tzc_wk 的):
我们考察一个点上一次标记下推到现在一共经历了哪些过程,有两种可能,要么没有被清空,权值直接被加上了一个数 \(v\)。要么曾经被清空过,一开始先 \(+v_0\),然后清空,又加了 \(v_1\),再清空,\(+v_2\),清空,……,最后 \(+v_m\),值为 \(v_m\)。不难发现由于我们只关心历史最大值,因此 \(v_1,v_2,\cdots,v_m\) 具体是什么不重要,我们只用关心以下几个值:
- 第一次加的值 \(v_0\),程序中用 \(add\_mx\) 表示。
- 这个值从上一次被标记下推是否被清空,\(clr\)。
- \(max \ v_1,v_2,\cdots,v_m\),程序中用 \(cov\_mx\)表示。
- 这个位置当前的值 \(v_m\),程序中用 \(tg\) 表示。
当然除了这四个标记之外,还有每个位置的权值 \(v\) 以及历史最大值 \(hmx\)。
考虑对一个子树清空/整体加值会对标记产生怎样的影响。首先是子树清空,这个比较容易,直接将 \(clr\) 设为 \(1\),\(tg,v\) 设为 \(0\) 即可。其次是整体加值,如果 \(clr\ne 0\) 那就令 \(tg\) 加 \(v\),并将 \(cov\_mx\) 对 \(tg\) 取 \(\max\),否则令 \(add\_mx\) 加 \(v\)。
然后是下推标记的问题,如果 \(clr=0\) 那么直接对左右儿子进行整体 \(+add\_mx\),然后 \(+v_1\),清空,\(+v_2\),清空,……,最后 \(+v_m\),这等价于先对左右儿子进行整体 \(+add\_mx\) 对该节点的 \(cov\_mx\) 取 \(\max\),然后令左右儿子的 \(tg\) 和 \(v\) 都等于 \(tg\)。注意每次操作之后都要实时更新 \(hmx\)。
在 \(pushdown\) 中更新 \(hmx\) 的方式就是将 \(hmx\) 与 \(cov\_mx\) 去个 \(\max\),因为 \(cov\_mx\) 中记录的就是在这段区间中(上次清空和这次清空的这段区间)的历史最大值。
优化建图
例题[NOI2019] 弹跳
暴力(1~8)
每次遇到一个点就遍历一遍属于它的弹跳装置,然后暴力连边,空间复杂度 \(O(nm)\) 。还有32分呢,这不比省队集训好
特殊性质一(9~13)
直接连边即可。
特殊性质二(14~18)
线段树优化建图啊。因为我们这里不是讲线段树,所以不展开来讲。空间复杂度 \(O(n+mlogn)\) ,时间复杂度 \(O((n+mlogn)log(n+mlogn))\) 。
(19~22) & (23~25)
23~25是用来卡 SPFA 的。
对于每一个城市 \(C \in [1,n]\) ,我们都把它先向K-D Tree上的与它对应的节点 \(C+n\) 连一条边( \(C+n \to C\))。然后我们遍历每一个弹跳机,假设它起点城市为 \(u\)。遍历过程中,对于每个树上节点 \(x\) ,如果它维护的矩阵在弹跳机的范围外自然就返回,否则我们判断它维护的矩阵是否被该弹跳机的矩阵包围,是的我们就连一条 \(u \to x\) 的边返回,否则:如果树上节点 \(x\) 对应的城市 \(C\) 满足在弹跳机的范围内,我们就连一条边 \(u \to x-n\) ,\(x-n\) 就是 \(x\) 对应的城市,然后查询左右儿子。
这样其实和暴力差不了多少,我们考虑优化一下。
我们建图的目的是什么?当然是知道这个点可以走到哪里。
知道这一点你就可以写了。
我们考虑在跑最短路的途中,对于每一个城市 \(C\) ,我们直接遍历每一个属于它的弹跳机,对于树上每一个节点 \(x\) ,我们按刚才说的方法判断,把刚才说的方法中的连边改成更新并加入队列即可。
时间复杂度 \(O(m\sqrt{n}logn)\) 。但因为 ccf 的原因跑不满,卡卡常就过了。
在uoj我的会被hack,但我亲眼看见一个和我做法一样的人过了(还挺多),所以不要借鉴我的大常数代码
最后不忘附上一句,关于 spfa ,它死了

