
一,人眼特性及分清各类图像的概念

 (色觉三基色)
(色觉三基色)
彩色图像(color image):
每个像素通常是由红(R)、绿(G)、蓝(B)三个分量来表示的,分量介于(0,255)。RGB图像与索引图像一样都可以用来表示彩色图像。与索引图像一样,它分别用红(R)、绿(G)、蓝(B)三原色的组合来表示每个像素的颜色。但与索引图像不同的是,RGB图像每一个像素的颜色值(由RGB三原色表示)直接存放在图像矩阵中,由于每一像素的颜色需由R、G、B三个分量来表示,M、N分别表示图像的行列数,三个M x N的二维矩阵分别表示各个像素的R、G、B三个颜色分量。RGB图像的数据类型一般为8位无符号整形,通常用于表示和存放真彩色图像,当然也可以存放灰度图像。
灰度图像(gray image):
是每个像素只有一个采样颜色的图像,这类图像通常显示为从最暗黑色到最亮的白色的灰度,尽管理论上这个采样可以任何颜色的不同深浅,甚至可以是不同亮度上的不同颜色。灰度图像与黑白图像不同,在计算机图像领域中黑白图像只有黑色与白色两种颜色;但是,灰度图像在黑色与白色之间还有许多级的颜色深度。灰度图像经常是在单个电磁波频谱如可见光内测量每个像素的亮度得到的,用于显示的灰度图像通常用每个采样像素8位的非线性尺度来保存,这样可以有256级灰度(如果用16位,则有65536级)。
二值图像(binary image):
即一幅二值图像的二维矩阵仅由0、1两个值构成,“0”代表黑色,“1”代白色。由于每一像素(矩阵中每一元素)取值仅有0、1两种可能,所以计算机中二值图像的数据类型通常为1个二进制位。二值图像通常用于文字、线条图的扫描识别(OCR)和掩膜图像的存储。
索引图像:
即它的文件结构比较复杂,除了存放图像的二维矩阵外,还包括一个称之为颜色索引矩阵MAP的二维数组。MAP的大小由存放图像的矩阵元素值域决定,如矩阵元素值域为[0,255],则MAP矩阵的大小为256Ⅹ3,用MAP=[RGB]表示。MAP中每一行的三个元素分别指定该行对应颜色的红、绿、蓝单色值,MAP中每一行对应图像矩阵像素的一个灰度值,如某一像素的灰度值为64,则该像素就与MAP中的第64行建立了映射关系,该像素在屏幕上的实际颜色由第64行的[RGB]组合决定。也就是说,图像在屏幕上显示时,每一像素的颜色由存放在矩阵中该像素的灰度值作为索引通过检索颜色索引矩阵MAP得到。索引图像的数据类型一般为8位无符号整形(int8),相应索引矩阵MAP的大小为256Ⅹ3,因此一般索引图像只能同时显示256种颜色,但通过改变索引矩阵,颜色的类型可以调整。索引图像的数据类型也可采用双精度浮点型(double)。索引图像一般用于存放色彩要求比较简单的图像,如Windows中色彩构成比较简单的壁纸多采用索引图像存放,如果图像的色彩比较复杂,就要用到RGB真彩色图像。
二,数字图像处理的目的和应用领域
目的:

![]()
应用领域:




三,数字图像处理应用的特点

四,数字图像处理方法(空域法和变换域法)
1、空域法:直接针对图像阵列的元素处理
(1)领域处理法
梯度算子(Gradient Argorithm)
拉普拉斯算子(Laphacian Operator)
平滑算子(Smoothing Operator)
卷积运算(Convolution Algorithm)
(2)点处理法
灰度处理(Gray Processing)
面积、周长、体积、重心运算,etc
2、变换域法:正交变换好处是可逆的且没有信息损失
空间图像 –>(正交)变换–>处理–>反变换
*滤波处理
*数据压缩
*特征提取
五,MATLAB基础

六,图像的感知与获取
1,传感器
A,胶片(化学反应模拟成像)
B,CCD

所以一旦某一行像素出现问题会影响下一行的输出。
C,CMOS


2,成像
3,图像数字化:采样量化编码
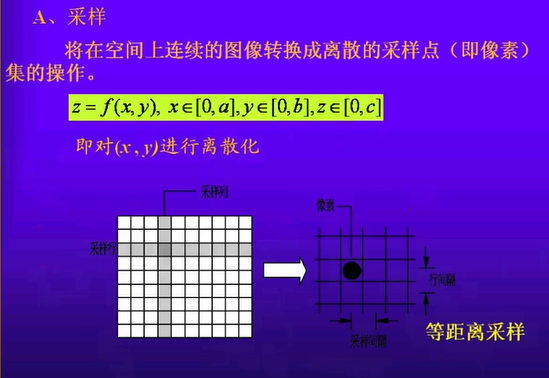
A,采样

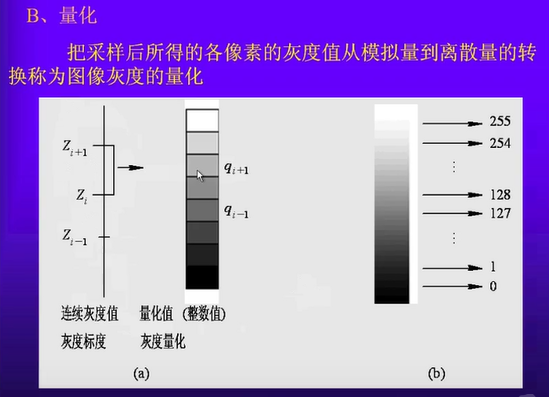
B,量化

C,编码

七,数字图像基本性质
A,分辨率

如果是一个1024*1024的图像,在该屏幕上呈现,只能呈现图像的局部;如果显示一副240*240的图像,则只会占据显示屏的一部分。
B,像素深度:像素深度是指存储每个像素所用的位数,也用它来度量图像的分辨率。
C,位面数量

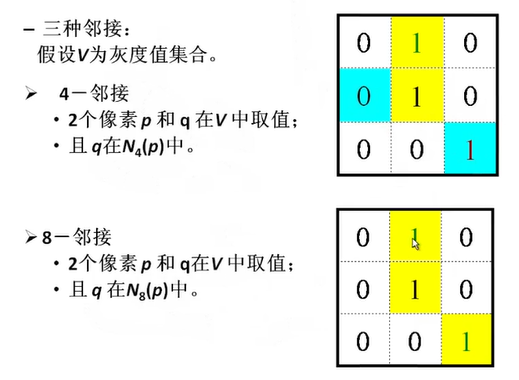
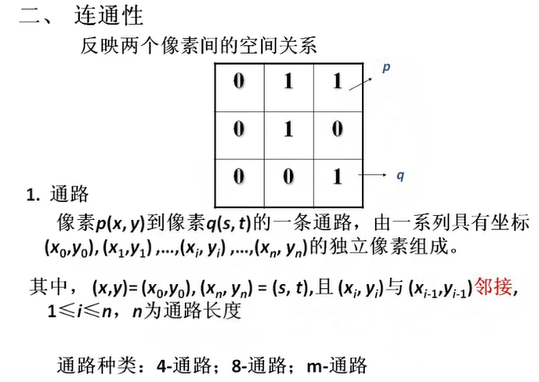
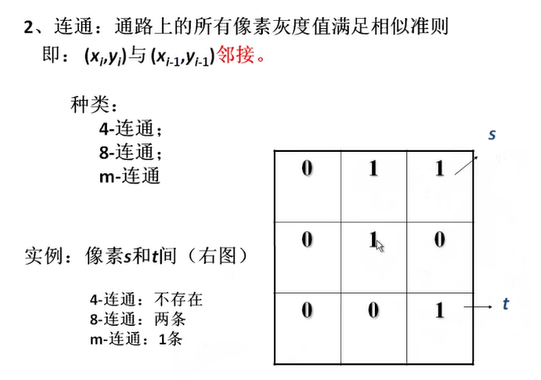
D,像素邻域邻接
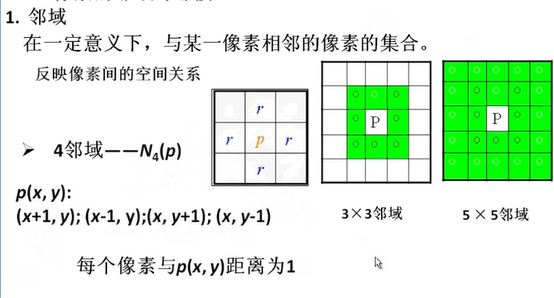



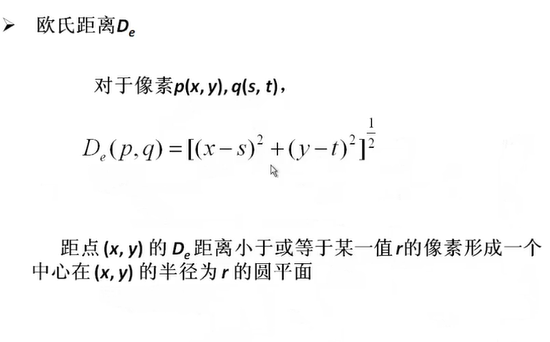
距离:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号