YOLO系列学习笔记
此文参考:
YOLOv3:https://blog.csdn.net/leviopku/article/details/82660381
YOLOv2:https://blog.csdn.net/Jesse_Mx/article/details/53925356
YOLO1
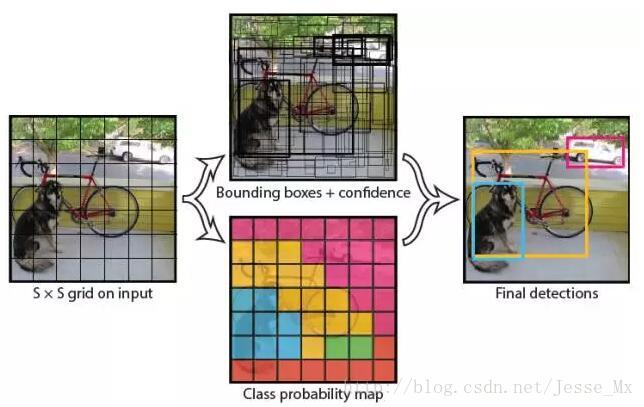
(1) 给一个大小为448X448的输入图像,首先将图像划分成7 * 7的网格。
(2) 对于每个网格,每个网格预测2个bouding box(每个box包含5个预测量)以及20个类别概率,总共输出7×7×(2*5+20)=1470个tensor
(3) 根据上一步可以预测出7 * 7 * 2 = 98个目标窗口,然后根据阈值去除可能性比较低的目标窗口,再由NMS去除冗余窗口即可。
YOLOv1使用了end-to-end的回归方法,没有region proposal步骤,直接回归便完成了位置和类别的判定。种种原因使得YOLOv1在目标定位上不那么精准,直接导致YOLO的检测精度并不是很高。
YOLOv2
1、相比于YOLO引入了anchor box,作者在网络中果断去掉了全连接层。首先,作者去掉了后面的一个池化层以确保输出的卷积特征图有更高的分辨率。然后,通过缩减网络,让图片输入分辨率为416 * 416,这一步的目的是为了让后面产生的卷积特征图宽高都为奇数,这样就可以产生一个center cell。作者观察到,大物体通常占据了图像的中间位置, 就可以只用中心的一个cell来预测这些物体的位置,否则就要用中间的4个cell来进行预测,这个技巧可稍稍提升效率。最后,YOLOv2使用了卷积层降采样(factor为32),使得输入卷积网络的416 * 416图片最终得到13 * 13的卷积特征图(416/32=13)。
加入了anchor boxes后,可以预料到的结果是召回率上升,准确率下降。我们来计算一下,假设每个cell预测9个建议框,那么总共会预测13 * 13 * 9 = 1521个boxes,而之前的网络仅仅预测7 * 7 * 2 = 98个boxes。具体数据为:没有anchor boxes,模型recall为81%,mAP为69.5%;加入anchor boxes,模型recall为88%,mAP为69.2%。这样看来,准确率只有小幅度的下降,而召回率则提升了7%,说明可以通过进一步的工作来加强准确率,的确有改进空间。
2、作者在使用anchor的时候遇到了两个问题,第一个是anchor boxes的宽高维度往往是精选的先验框(hand-picked priors),虽说在训练过程中网络也会学习调整boxes的宽高维度,最终得到准确的bounding boxes。但是,如果一开始就选择了更好的、更有代表性的先验boxes维度,那么网络就更容易学到准确的预测位置。
和以前的精选boxes维度不同,作者使用了K-means聚类方法类训练bounding boxes,可以自动找到更好的boxes宽高维度。传统的K-means聚类方法使用的是欧氏距离函数,也就意味着较大的boxes会比较小的boxes产生更多的error,聚类结果可能会偏离。为此,作者采用的评判标准是IOU(交并集),这样的话,error就和box的尺度无关了,最终的距离函数为:

作者通过改进的K-means对训练集中的boxes进行了聚类,判别标准是平均IOU得分,聚类结果如下图:
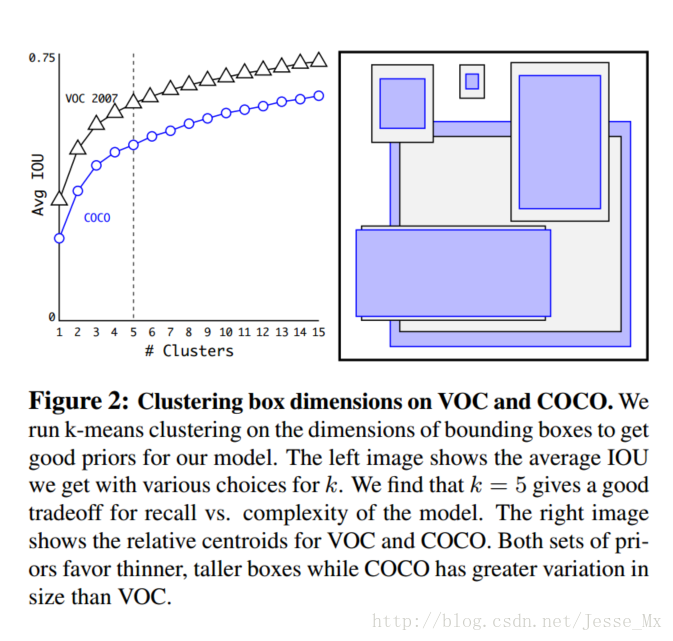
可以看到,平衡复杂度和IOU之后,最终得到k值为5,意味着作者选择了5种大小的box维度来进行定位预测,这与手动精选的box维度不同。结果中扁长的框较少,而瘦高的框更多(这符合行人的特征),这种结论如不通过聚类实验恐怕是发现不了的。
当然,作者也做了实验来对比两种策略的优劣,如下图,使用聚类方法,仅仅5种boxes的召回率就和Faster R-CNN的9种相当。说明K-means方法的引入使得生成的boxes更具有代表性,为后面的检测任务提供了便利。
YOLOv3

v3没有池化层和全连接层。特征图尺寸变换是通过改变卷积核的步长来实现的,比如stride=(2, 2),这就等于将图像边长缩小了一半。v3会将输出特征图缩小到输入的1/32。所以,通常都要求输入图片是32的倍数。
v2中对于前向过程中张量尺寸变换,都是通过最大池化来进行,一共有5次。而v3是通过卷积核增大步长来进行,也是5次
yolo v3输出了3个不同尺度的feature map,如上图所示的y1, y2, y3。采用多尺度来对不同size的目标进行检测。
对于COCO类别而言,有80个种类,所以每个box应该对每个种类都输出一个概率。这一点和yolo不一样,yolo是每个单元预测2个box,每个box需要有(x, y, w, h, confidence)五个基本参数,但是并不是对每一类都输出一个概率,yolo v3设定的是每个网格单元预测3个box,所以每个box需要有(x, y, w, h, confidence)五个基本参数,然后还要有80个类别的概率。所以3*(5 + 80) = 255。这个255就是这么来的。(yolo v1是 (2x5+20),20为20个类)
yolo v2采用直接预测相对位置,用聚类的方法得到5个anchor box prior,v3不一样,v3是选用的b-box priors 的k=9,对于tiny-yolo的话,k=6。priors都是在数据集上聚类得来的,有确定的数值,如下:
10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
yolo_v3只会对1个prior进行操作,也就是那个最佳prior。而logistic回归就是用来从9个anchor priors中找到得分最高的那一个

 浙公网安备 33010602011771号
浙公网安备 33010602011771号