
无人驾驶的规划与控制:简介
规划控制(planning & control)可分为路由寻径(routing)、行为决策(behavioral decision)、动作规划(motion planning)以及反馈控制(feedback control)
控制规划模块需要与感知预测模块和地图定位模块相结合
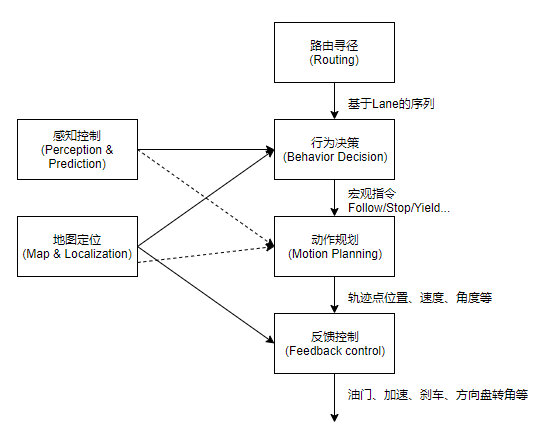
路径寻径
宏观上指导无人车按照什么样的道路行驶,实现从起点到终点
行为决策
行为决策接收路径寻径的结果,同时也接收感知预测和地图信息。行为决策在宏观上决定了无人车如何行驶,比如正常跟车,避让红绿灯和行人
动作规划
在一个较小的时空区域里,解决无人机从A点到B点的问题。动作规划需要具体把一个短暂时间t内从A到B的中间路径点做出规划,包括选择途径哪些具体的路径点,以及到达每个路径点时,无人车需要达到的速度、朝向、加速度以及车轮转向等
反馈控制
消化上层动作规划模块的输出轨迹点,通过一系列结合车身属性和外界物理因素的动力学计算,转换成对车辆Drive-By-Wire控制的油门,刹车,以及方向盘信号,从而尽可能地控制车去实际执行这些轨迹点

 浙公网安备 33010602011771号
浙公网安备 33010602011771号