
Convolutional Neural Networks卷积神经网络(二)
转自http://blog.csdn.net/zouxy09/article/details/8781543
CNNs是第一个真正成功训练多层网络结构的学习算法。它利用空间关系减少需要学习的参数数目以提高一般前向BP算法的训练性能。在CNN中,图像的一小部分(局部感受区域)作为层级结构的最低层的输入,信息再依次传输到不同的层,每层通过一个数字滤波器去获得观测数据的最显著的特征。这个方法能够获取对平移,缩放和旋转不变的观测数据的显著特征,因为图像的局部感受区域允许神经元或者处理单元可以访问到最基础的特征,例如定向边缘或者角点。
2)卷积神经网络的网络结构
卷积神经网络是一个多层的神经网络,每层由多个二维平面组成,而每个平面由多个独立神经元组成,

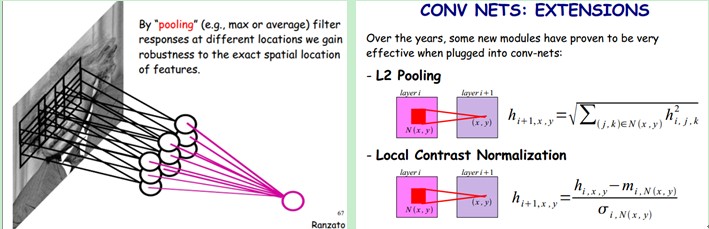
图:卷积神经网络的概念示范:输入图像通过和三个可训练的滤波器和可加偏置进行卷积,滤波过程如图一,卷积后在C1层产生三个特征映射图,然后特征映射图中每组的四个像素再进行求和,加权值,加偏置,通过一个Sigmoid函数得到三个S2层的特征映射图。这些映射图再进过滤波得到C3层。这个层级结构再和S2一样产生S4。最终,这些像素值被光栅化,并连接成一个向量输入到传统的神经网络,得到输出。
一般地,C层为特征提取层,每个神经元的输入与前一层的局部感受野相连,并提取该局部的特征,一旦该局部特征被提取后,它与其他特征间的位置关系也随之确定下来;S层是特征映射层,网络的每个计算层由多个特征映射组成,每个特征映射为一个平面,平面上所有神经元的权值相等。特征映射结构采用影响函数核小的sigmoid函数作为卷积网络的激活函数,使得特征映射具有位移不变性。
此外,由于一个映射面上的神经元共享权值,因而减少了网络自由参数的个数,降低了网络参数选择的复杂度。卷积神经网络中的每一个特征提取层(C-层)都紧跟着一个用来求局部平均与二次提取的计算层(S-层),这种特有的两次特征提取结构使网络在识别时对输入样本有较高的畸变容忍能力。
3)关于参数减少与权值共享
上面聊到,好像CNN一个牛逼的地方就在于通过感受野和权值共享减少了神经网络需要训练的参数的个数。那究竟是啥的呢?
下图左:如果我们有1000x1000像素的图像,有1百万个隐层神经元,那么他们全连接的话(每个隐层神经元都连接图像的每一个像素点),就有1000x1000x1000000=10^12个连接,也就是10^12个权值参数。然而图像的空间联系是局部的,就像人是通过一个局部的感受野去感受外界图像一样,每一个神经元都不需要对全局图像做感受,每个神经元只感受局部的图像区域,然后在更高层,将这些感受不同局部的神经元综合起来就可以得到全局的信息了。这样,我们就可以减少连接的数目,也就是减少神经网络需要训练的权值参数的个数了。如下图右:假如局部感受野是10x10,隐层每个感受野只需要和这10x10的局部图像相连接,所以1百万个隐层神经元就只有一亿个连接,即10^8个参数。比原来减少了四个0(数量级),这样训练起来就没那么费力了,但还是感觉很多的啊,那还有啥办法没?

我们知道,隐含层的每一个神经元都连接10x10个图像区域,也就是说每一个神经元存在10x10=100个连接权值参数。那如果我们每个神经元这100个参数是相同的呢?也就是说每个神经元用的是同一个卷积核去卷积图像。这样我们就只有100个参数,不管隐层的神经元个数有多少,两层间的连接只有100个参数,这是权值共享,就是卷积神经网络的主要优势,共同学习。
好了,你就会想,这样提取特征也忒不靠谱吧,这样你只提取了一种特征啊?对了,真聪明,我们需要提取多种特征对不?假如一种滤波器,也就是一种卷积核就是提出图像的一种特征,例如某个方向的边缘。那么我们需要提取不同的特征,怎么办,加多几种滤波器不就行了吗?对了。所以假设我们加到100种滤波器,每种滤波器的参数不一样,表示它提出输入图像的不同特征,例如不同的边缘。(这样就会有100个feature map)这样每种滤波器去卷积图像就得到对图像的不同特征的放映,我们称之为Feature Map。所以100种卷积核就有100个Feature Map。这100个Feature Map就组成了一层神经元。到这个时候明了了吧。我们这一层有多少个参数了?100种卷积核x每种卷积核共享100个参数=100x100=10K,也就是1万个参数。见下图右:不同的颜色表达不同的滤波器。

嘿哟,遗漏一个问题了。刚才说隐层的参数个数和隐层的神经元个数无关,只和滤波器的大小和滤波器种类的多少有关。那么隐层的神经元个数怎么确定呢?它和原图像,也就是输入的大小(神经元个数)、滤波器的大小和滤波器在图像中的滑动步长都有关!例如,我的图像是1000x1000像素,而滤波器大小是10x10,假设滤波器没有重叠,也就是步长为10,这样隐层的神经元个数就是(1000x1000 )/ (10x10)=100x100个神经元了,假设步长是8,也就是卷积核会重叠两个像素,那么……我就不算了,思想懂了就好。注意了,这只是一种滤波器,也就是一个Feature Map的神经元个数哦,如果100个Feature Map就是100倍了。由此可见,图像越大,神经元个数和需要训练的权值参数个数的贫富差距就越大。
需要注意的一点是,上面的讨论都没有考虑每个神经元的偏置部分。所以权值个数需要加1 。这个也是同一种滤波器共享的。
总之,卷积网络的核心思想是将:局部感受野、权值共享(或者权值复制)以及时间或空间亚采样这三种结构思想结合起来获得了某种程度的位移、尺度、形变不变性。
例子:

LeNet-5共有7层,不包含输入,每层都包含可训练参数(连接权重)。输入图像为32*32大小。这要比Mnist数据库(一个公认的手写数据库)中最大的字母还大。这样做的原因是希望潜在的明显特征如笔画断电或角点能够出现在最高层特征监测子感受野的中心。
我们先要明确一点:每个层有多个Feature Map,每个Feature Map通过一种卷积滤波器提取输入的一种特征,然后每个Feature Map有多个神经元。
C1层是一个卷积层(为什么是卷积?卷积运算一个重要的特点就是,通过卷积运算,可以使原信号特征增强,并且降低噪音),由6个特征图Feature Map构成。特征图中每个神经元与输入中5*5的邻域相连。特征图的大小为28*28,这样能防止输入的连接掉到边界之外(是为了BP反馈时的计算,不致梯度损失,个人见解)。C1有156个可训练参数(每个滤波器5*5=25个unit参数和一个bias参数,一共6个滤波器,共(5*5+1)*6=156个参数),共156*(28*28)=122,304个连接。
S2层是一个下采样层(为什么是下采样?利用图像局部相关性的原理,对图像进行子抽样,可以减少数据处理量同时保留有用信息),有6个14*14的特征图。特征图中的每个单元与C1中相对应特征图的2*2邻域相连接。S2层每个单元的4个输入相加,乘以一个可训练参数,再加上一个可训练偏置。结果通过sigmoid函数计算。可训练系数和偏置控制着sigmoid函数的非线性程度。如果系数比较小,那么运算近似于线性运算,亚采样相当于模糊图像。如果系数比较大,根据偏置的大小亚采样可以被看成是有噪声的“或”运算或者有噪声的“与”运算。每个单元的2*2感受野并不重叠,因此S2中每个特征图的大小是C1中特征图大小的1/4(行和列各1/2)。S2层有12个可训练参数和5880个连接。
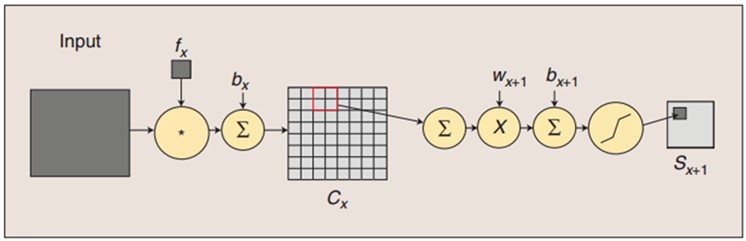
图:卷积和子采样过程:卷积过程包括:用一个可训练的滤波器fx去卷积一个输入的图像(第一阶段是输入的图像,后面的阶段就是卷积特征map了),然后加一个偏置bx,得到卷积层Cx。子采样过程包括:每邻域四个像素求和变为一个像素,然后通过标量Wx+1加权,再增加偏置bx+1,然后通过一个sigmoid激活函数,产生一个大概缩小四倍的特征映射图Sx+1。
所以从一个平面到下一个平面的映射可以看作是作卷积运算,S-层可看作是模糊滤波器,起到二次特征提取的作用。隐层与隐层之间空间分辨率递减,而每层所含的平面数递增,这样可用于检测更多的特征信息。
C3层也是一个卷积层,它同样通过5x5的卷积核去卷积层S2,然后得到的特征map就只有10x10个神经元,但是它有16种不同的卷积核,所以就存在16个特征map了。这里需要注意的一点是:C3中的每个特征map是连接到S2中的所有6个或者几个特征map的,表示本层的特征map是上一层提取到的特征map的不同组合(这个做法也并不是唯一的)。(看到没有,这里是组合,就像之前聊到的人的视觉系统一样,底层的结构构成上层更抽象的结构,例如边缘构成形状或者目标的部分)。
刚才说C3中每个特征图由S2中所有6个或者几个特征map组合而成。为什么不把S2中的每个特征图连接到每个C3的特征图呢?原因有2点。第一,不完全的连接机制将连接的数量保持在合理的范围内。第二,也是最重要的,其破坏了网络的对称性。由于不同的特征图有不同的输入,所以迫使他们抽取不同的特征(希望是互补的)。
例如,存在的一个方式是:C3的前6个特征图以S2中3个相邻的特征图子集为输入。接下来6个特征图以S2中4个相邻特征图子集为输入。然后的3个以不相邻的4个特征图子集为输入。最后一个将S2中所有特征图为输入。这样C3层有1516个可训练参数和151600个连接。
S4层是一个下采样层,由16个5*5大小的特征图构成。特征图中的每个单元与C3中相应特征图的2*2邻域相连接,跟C1和S2之间的连接一样。S4层有32个可训练参数(每个特征图1个因子和一个偏置)和2000个连接。
C5层是一个卷积层,有120个特征图。每个单元与S4层的全部16个单元的5*5邻域相连。由于S4层特征图的大小也为5*5(同滤波器一样),故C5特征图的大小为1*1:这构成了S4和C5之间的全连接。之所以仍将C5标示为卷积层而非全相联层,是因为如果LeNet-5的输入变大,而其他的保持不变,那么此时特征图的维数就会比1*1大。C5层有48120个可训练连接。
F6层有84个单元(之所以选这个数字的原因来自于输出层的设计),与C5全连接。有(120+1)*84个可训练参数。如同经典神经网络,F6层计算输入向量和权重向量之间的点积,再加上一个偏置。然后将其传递给sigmoid函数产生单元i的一个状态。
最后,输出层由欧式径向基函数单元组成,
RBF (Radial Basis Function)可以看做是一个高维空间中的曲面拟合(逼近)问题,学习是为了在多维空间找到一个能够最佳匹配训练数据的曲面,然后来一批新的数据,用刚才训练的那个曲面来处理(比如回归、分类)。RBF的本质思想是反向传播学习算法应用递归技术,这种技术在统计学中被称为随机逼近。RBF里的basis function(径向基函数里的基函数)就是在神经网络的隐单元里提供了一个函数集,该函数集在输入模式(向量)扩散至隐空间时,为其构建了一个任意的基。这个函数集中的函数就被称为径向基函数。
映射到高维空间的原因:
1、一个模式分类问题如果映射到一个高维空间将会比映射到一个地位空间更可能实现线性可分。
2、隐空间的维数越高,逼近就越精确
注意:这里是非线性映射到高维空间,其目的是是使得分类更加容易、精确。
最后,输出层由欧式径向基函数单元组成,每类一个单元,每个有84个输入。换句话说,每个输出RBF单元计算输入向量和参数向量之间的欧式距离。输出离参数向量越远,RBF输出的越大。一个RBF输出可以被理解为衡量输入模式和与RBF相关联类的一个模型的匹配程度的惩罚项。用概率术语来说,RBF输出可以被理解为F6层配置空间的高斯分布的对数似然函数。给定一个输入模式,损失函数应该能使F6的配置与RBF参数向量(即模式的期望分类)足够接近。这些单元的参数时人工选取并保持固定的。
RBF参数向量起着F6层目标向量的角色。需要指出这些向量的成分是+1或者-1,这正好在F6 sigmoid的范围内,因此可以防止sigmoid函数饱和。实际上,+1和-1是sigmoid函数的最大弯曲的点处。这使得F6单元运行在最大非线性范围内。必须避免sigmoid函数的饱和,因为这将会导致损失函数较慢的收敛和病态问题。
5)训练过程
神经网络用于模式识别的主流是有指导学习网络,无指导学习网络更多的是用于聚类分析。对于有指导的模式识别,由于任一样本的类别是已知的,样本在空间的分布不再是依据其自然分布倾向来划分,而是要根据同类样本在空间的分布及不同类样本之间的分离程度找一种适当的空间划分方法,或者找到一个分类边界,使得不同类样本分别位于不同的区域内。这就需要一个长时间且复杂的学习过程,不断调整用以划分样本空间的分类边界的位置,使尽可能少的样本被划分到非同类区域中。
卷积网络在本质上是一种输入到输出的映射,它能够学习大量的输入与输出之间的映射关系,而不需要任何输入和输出之间的精确的数学表达式,只要用已知的模式对卷积网络加以训练,网络就具有输入输出对之间的映射能力。卷积网络执行的是有导师训练,所以其样本集是由形如:(输入向量,理想输出向量)的向量对构成的。所有这些向量对,都应该是来源于网络即将模拟的系统的实际“运行”结果。它们可以是从实际运行系统中采集来的。在开始训练前,所有的权都应该用一些不同的小随机数进行初始化。“小随机数”用来保证网络不会因权值过大而进入饱和状态,从而导致训练失败;“不同”用来保证网络可以正常地学习。实际上,如果用相同的数去初始化权矩阵,则网络无能力学习。
训练算法与传统的BP算法差不多。主要包括4步,这4步被分为两个阶段:
第一阶段,向前传播阶段:
a)从样本集中取一个样本(X,Yp),将X输入网络;
b)计算相应的实际输出Op。
在此阶段,信息从输入层经过逐级的变换,传送到输出层。这个过程也是网络在完成训练后正常运行时执行的过程。在此过程中,网络执行的是计算(实际上就是输入与每层的权值矩阵相点乘,得到最后的输出结果):
Op=Fn(…(F2(F1(XpW(1))W(2))…)W(n))
第二阶段,向后传播阶段
a)算实际输出Op与相应的理想输出Yp的差;
b)按极小化误差的方法反向传播调整权矩阵。
6)卷积神经网络的优点
卷积神经网络CNN主要用来识别位移、缩放及其他形式扭曲不变性的二维图形。由于CNN的特征检测层通过训练数据进行学习,所以在使用CNN时,避免了显式的特征抽取,而隐式地从训练数据中进行学习;再者由于同一特征映射面上的神经元权值相同,所以网络可以并行学习,这也是卷积网络相对于神经元彼此相连网络的一大优势。卷积神经网络以其局部权值共享的特殊结构在语音识别和图像处理方面有着独特的优越性,其布局更接近于实际的生物神经网络,权值共享降低了网络的复杂性,特别是多维输入向量的图像可以直接输入网络这一特点避免了特征提取和分类过程中数据重建的复杂度。
流的分类方式几乎都是基于统计特征的,这就意味着在进行分辨前必须提取某些特征。然而,显式的特征提取并不容易,在一些应用问题中也并非总是可靠的。卷积神经网络,它避免了显式的特征取样,隐式地从训练数据中进行学习。这使得卷积神经网络明显有别于其他基于神经网络的分类器,通过结构重组和减少权值将特征提取功能融合进多层感知器。它可以直接处理灰度图片,能够直接用于处理基于图像的分类。
卷积网络较一般神经网络在图像处理方面有如下优点: a)输入图像和网络的拓扑结构能很好的吻合;b)特征提取和模式分类同时进行,并同时在训练中产生;c)权重共享可以减少网络的训练参数,使神经网络结构变得更简单,适应性更强。
7)小结
CNNs中这种层间联系和空域信息的紧密关系,使其适于图像处理和理解。而且,其在自动提取图像的显著特征方面还表现出了比较优的性能。在一些例子当中,Gabor滤波器已经被使用在一个初始化预处理的步骤中,以达到模拟人类视觉系统对视觉刺激的响应。在目前大部分的工作中,研究者将CNNs应用到了多种机器学习问题中,包括人脸识别,文档分析和语言检测等。为了达到寻找视频中帧与帧之间的相干性的目的,目前CNNs通过一个时间相干性去训练,但这个不是CNNs特有的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号