
[Bullet3]三种碰撞检测及实现
官方文档:http://bulletphysics.org
开源代码:https://github.com/bulletphysics/bullet3/releases
API文档:http://bulletphysics.org/Bullet/BulletFull/annotated.html
bullet3的三种碰撞检测
以下三种方式都是可以达到碰撞检测的效果:
btCollisionWorld::contactTest检测指定对象是否与场景发生碰撞;btCollisionWorld::performDiscreteCollisionDetection检测场景中所有的碰撞;btDynamicsWorld::stepSimulation模拟运动。
还有一种射线检测,但是与这里的物体碰撞稍微有些区别,这里就不展开来讲了。
0. 准备工作
先创建一个场景,增加一个地板(box)
btDefaultCollisionConfiguration* g_colConfig;
btCollisionDispatcher* g_dispatcher;
btBroadphaseInterface* g_broadInterface;
btSequentialImpulseConstraintSolver* g_solver;
btDynamicsWorld* g_world; // 场景信息,退出的时候需要delete
g_colConfig = new btDefaultCollisionConfiguration();
g_dispatcher = new btCollisionDispatcher(g_colConfig);
g_broadInterface = new btDbvtBroadphase();
g_solver = new btSequentialImpulseConstraintSolver;
g_world = new btDiscreteDynamicsWorld(g_dispatcher, g_broadInterface, g_solver, g_colConfig);
g_world->setGravity(btVector3(0,-10,0)); // 设置重力加速度
// add a test box
{
btCollisionShape* shape = new btBoxShape(btVector3(btScalar(1000.),btScalar(10.),btScalar(1000.)));
btTransform trans;
trans.setIdentity();
trans.setOrigin(btVector3(0, -10, 0));
btScalar mass=0.f;
btVector3 localInertia(0, 0, 0);
bool isDynamic = (mass != 0.f);
if (isDynamic)
shape->calculateLocalInertia(mass, localInertia);
btDefaultMotionState* myMotionState = new btDefaultMotionState(trans);
btRigidBody::btRigidBodyConstructionInfo cInfo(mass, myMotionState, shape, localInertia);
btRigidBody* body = new btRigidBody(cInfo);
g_world->addRigidBody(body);
}
1. btCollisionWorld::contactTest
完整函数内容为
void btCollisionWorld::contactTest(btCollisionObject * colObj, ContactResultCallback & resultCallback)
contactTest会对确定的colObj对象与btCollisionWorld中的所有对象进行接触检测,并调用ContactResultCallBack回调。
其实这个函数不算碰撞检测,只是算接触检测,如果距离为0,是会触发回调的。
1.1. 继承回调的结构体
ContactResultCallback结构体有一个名为addSingleResult的纯虚函数,在继承的时候一定要实现addSingleResult函数。这个也是碰撞的时候执行的回调函数。是这个结构体的核心。碰撞信息会存储在btManifoldPoint & cp中,使用方法也比较简单,可以参考API文档的接口。其它地方的碰撞,也是用这个对象存储,处理方法是一样的。
// 碰撞检测回调
struct MyColCallBack : btCollisionWorld::ContactResultCallback
{
public:
btScalar addSingleResult(
btManifoldPoint & cp,
const btCollisionObjectWrapper * colObj0Wrap,
int partId0,
int index0,
const btCollisionObjectWrapper * colObj1Wrap,
int partId1,
int index1)
{
btVector3 posA = cp.getPositionWorldOnA();
btVector3 posB = cp.getPositionWorldOnB();
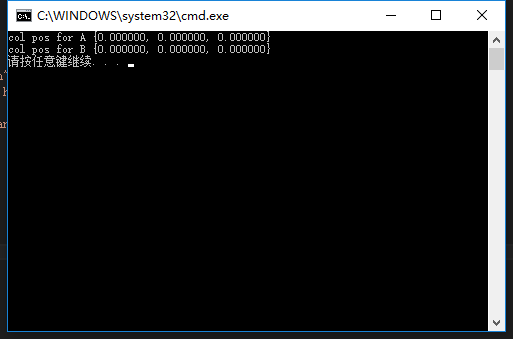
printf("col pos for A {%f, %f, %f}\n", posA.getX(), posA.getY(), posA.getZ());
printf("col pos for B {%f, %f, %f}\n", posB.getX(), posB.getY(), posB.getZ());
return btScalar(0.f);
};
};
1.2. 碰撞检测
// 创建一个球体,并加入到场景中
btCollisionShape* shape = new btSphereShape(btScalar(1.f));
btTransform trans;
trans.setIdentity();
trans.setOrigin(btVector3(0, 1, 0));
btScalar mass=1.f;
btVector3 localInertia(0, 0, 0);
bool isDynamic = (mass != 0.f);
if (isDynamic)
shape->calculateLocalInertia(mass, localInertia);
btDefaultMotionState* myMotionState = new btDefaultMotionState(trans);
btRigidBody::btRigidBodyConstructionInfo cInfo(mass, myMotionState, shape, localInertia);
btRigidBody* g_body = new btRigidBody(cInfo);
g_world->addRigidBody(g_body);
// 创建回调并碰撞检测
MyColCallBack callBack;
g_world->contactTest(g_body, callBack);
// todo delete
运行结果:
2. btCollisionWorld::performDiscreteCollisionDetection
performDiscreteCollisionDetection会对场景中的所有物体进行一次碰撞检测。而contactTest是对确定的物体进行碰撞检测。
g_world->performDiscreteCollisionDetection();
list<btCollisionObject*> m_collisionObjects;
int numManifolds = g_world->getDispatcher()->getNumManifolds();
for(int i=0; i<numManifolds; i++)
{
btPersistentManifold* contactManifold = g_world->getDispatcher()->getManifoldByIndexInternal(i);
btCollisionObject* obA = (btCollisionObject*)(contactManifold->getBody0());
btCollisionObject* obB = (btCollisionObject*)(contactManifold->getBody1());
int numContacts = contactManifold->getNumContacts();
for(int j=0; j<numContacts; j++)
{
btManifoldPoint& pt = contactManifold->getContactPoint(j);
if(pt.getDistance()<=0.f)
{
m_collisionObjects.push_back(obA);
m_collisionObjects.push_back(obB);
btVector3 posA = pt.getPositionWorldOnA();
btVector3 posB = pt.getPositionWorldOnB();
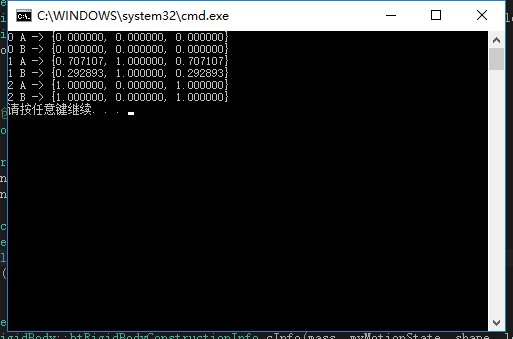
printf("%d A -> {%f, %f, %f}\n", i, posA.getX(), posA.getY(), posA.getZ()); // 碰撞点
printf("%d B -> {%f, %f, %f}\n", i, posB.getX(), posB.getY(), posB.getZ());
}
}
}
这里需要注意一下,多个物体两两碰撞的时候,列表m_collisionObjects内是存在重复的可能的,往往需要去重一下。
m_collisionObjects.sort();
m_collisionObjects.unique();
运行结果:
这里我多加了一个半径为1,位置为{1,1,0}的求,然后基本上两个球和地板发生了两两碰撞。
3. btDynamicsWorld::stepSimulation
完整的函数内容为:
virtual int btDynamicsWorld::stepSimulation(
btScalar timeStep,
int maxSubSteps = 1,
btScalar fixedTimeStep = btScalar(1.)/btScalar(60.))
stepSimulation其实不是用来做碰撞检测的,而是用来做物理运动模拟的。既然能做运动模拟,那肯定也能够做碰撞检测了。
3.1. 模拟运动
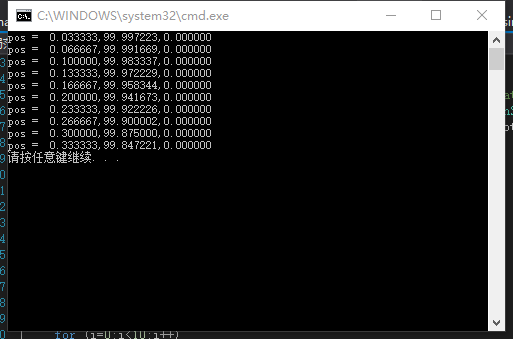
设置场景的重力加速为btVector3(0,-10,0),增加一个半径为1,位置为{0,100,0}的球体,并设置其质量为1,冲量为{2,0,0},即球体会以x轴速度为2,Y轴以-10的加速度做抛物线运动。
// 设置重力加速度
g_world->setGravity(btVector3(0,-10,0));
// 创建一个球体,并加入到场景中
btCollisionShape* shape = new btSphereShape(btScalar(1.f));
btTransform trans;
trans.setIdentity();
trans.setOrigin(btVector3(0, 100, 0));
btScalar mass=1.f;
btVector3 localInertia(0, 0, 0);
bool isDynamic = (mass != 0.f);
if (isDynamic)
shape->calculateLocalInertia(mass, localInertia);
btDefaultMotionState* myMotionState = new btDefaultMotionState(trans);
btRigidBody::btRigidBodyConstructionInfo cInfo(mass, myMotionState, shape, localInertia);
btRigidBody* g_body = new btRigidBody(cInfo);
g_body->applyCentralImpulse(btVector3(2,0,0)); // 设置冲量
g_world->addRigidBody(g_body);
for (i=0;i<10;i++)
{
g_world->stepSimulation(1.f/60.f,10); // 模拟运动
trans = g_body->getWorldTransform();
printf("world pos = %f,%f,%f\n", trans.getOrigin().getX(),
trans.getOrigin().getY(),
trans.getOrigin().getZ());
}
}
执行结果
作者:Ron Ngai
出处:http://rondsny.github.io
关于作者:断码码农一枚。
欢迎转载,但未经作者同意须在文章页面明显位置给出原文连接
如有问题,可以通过rondsny#gmail.com 联系我,非常感谢。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号