
ROS-PCL点云库的安装
网上各种说安装点云库还慢,中间出现一些没有依赖库的情况,但在我这里都是很顺利,难道是一开始安装了ROS的原因?不是很清楚,暂且将过程写下来。
一,下载PCL
$ git clone https://github.com/PointCloudLibrary/pcl.git pcl-trunk
$ ln -s pcl-trunk pcl
二,安装库
$ sudo apt-get install cmake
$ sudo apt-get install g++
$
sudo apt-get install libboost-all-dev //有些教程上说安装 sudo apt-get install libboost1.55-all-dev ,但测试过有依赖库的问题。$ sudo apt-get install libeigen3-dev
$ sudo apt-get install libflann-dev
$ sudo apt-get install python
$ sudo apt-get install libusb-1.0-0-dev
$ sudo apt-get install libudev-dev
$ sudo apt-get install openjdk-6-jdk
$ sudo apt-get install freeglut3-dev
$ sudo apt-get install doxygen
$ sudo apt-get install graphviz
$ sudo apt-get install libpng12-dev
$ sudo apt-get install libgtest-dev
$ sudo apt-get install libxmu-dev
$ sudo apt-get install libxi-dev
$ sudo apt-get install libpcap-dev
$ sudo apt-get install libqhull-dev
$ sudo apt-get install libvtk5-qt4-dev
$ sudo apt-get install python-vtk
$ sudo apt-get install libvtk-java
三,编译库
$ cd pcl-trunk
$ mkdir build
$ cd build
$ cmake -DCMAKE_BUILD_TYPE=None -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON ..
$ make
$ sudo make install
四,测试PCL
1、HOME目录下 pcl-trunk->doc->tutorials->content->sources下有PCL例程:这里我选择的是cloud_viewer文件夹下的cloud_viewer.cpp
2、创建demo包
$ cd catkin_ws/src/ -----/ros里面的内容
$ catkin_create_pkg demo std_msgs rospy roscpp
3、将cloud_viewer.cpp文件拷贝到demo文件下,同时用cloud_viewer文件夹下的CmakeList.txt代替demo文件夹下的CmakeList.txt文件
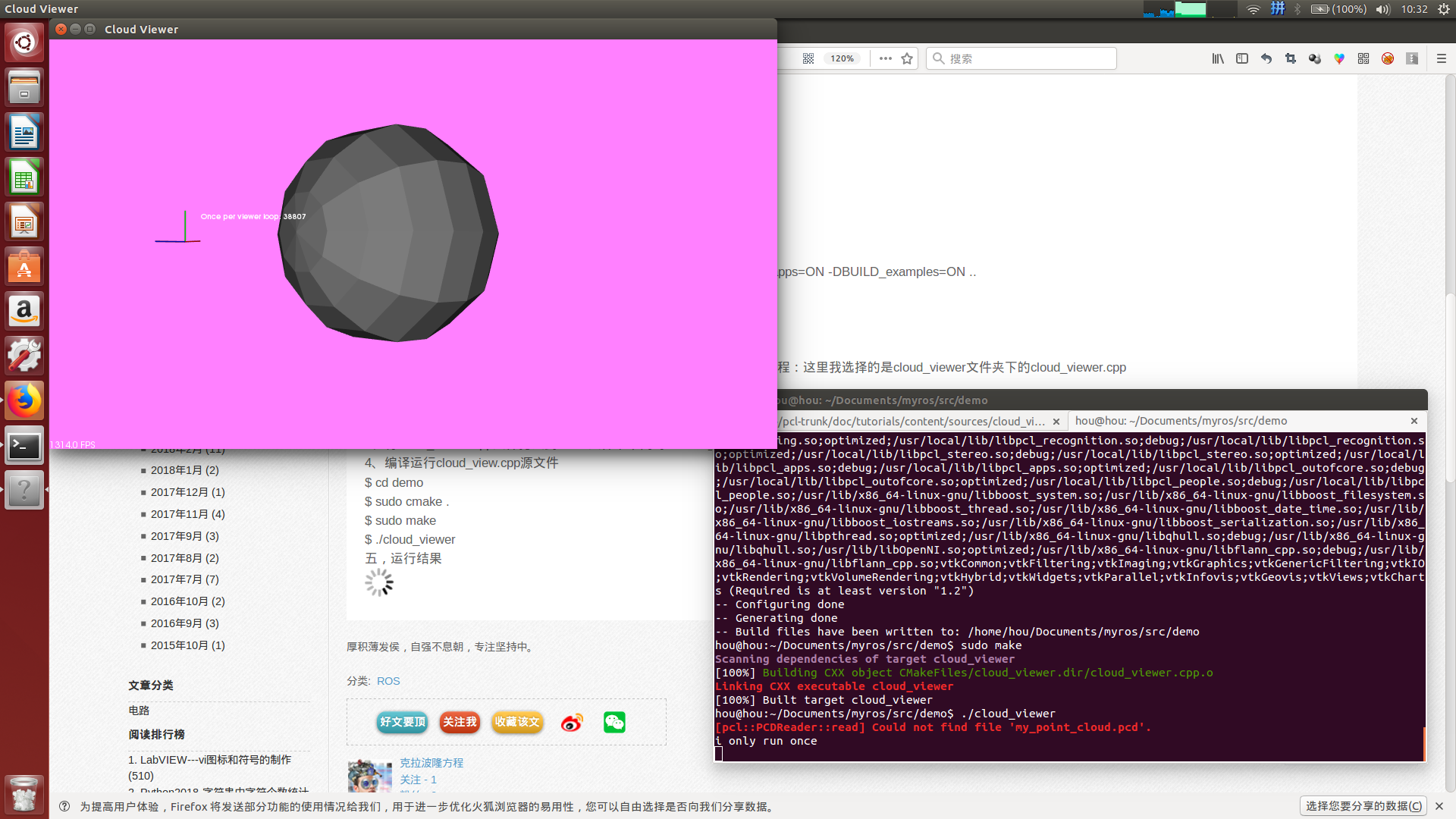
4、编译运行cloud_view.cpp源文件
$ cd demo
$ sudo cmake . (Notice here is a dot)
$ sudo make
$ ./cloud_viewer
五,运行结果
厚积薄发,开物成务。
德才兼备、知行合一。
自强不息,厚德载物。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号