

数字图像处理八九章学习总结
数字图像处理
8.数字形态学图像处理
8.1 背景&基础
(1)基本思想:选择具有一定尺寸和形状的结构元素度量,并提取其相关形状结构图像分量,以达到对图像分析和识别的目的。
(2)并集 A∪B 、交集 A∩B 、补集 Ac 、差集 A - B、 映射  、平移 (A) z
、平移 (A) z
(3)结构元素: 一个由0值和1值组成的矩阵。每个结构元素有一个原点,指定待处理像素位置。
8.2 二值图像形态学基本运算
(1)膨胀:在图像中目标边界周围增添像素。

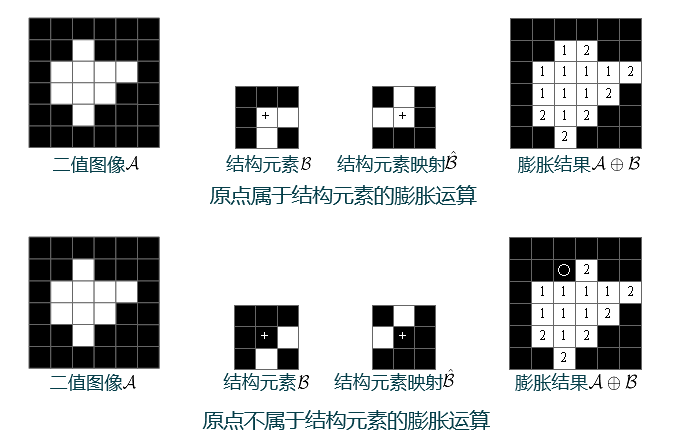
(2)腐蚀:移除图像中目标边界的像素

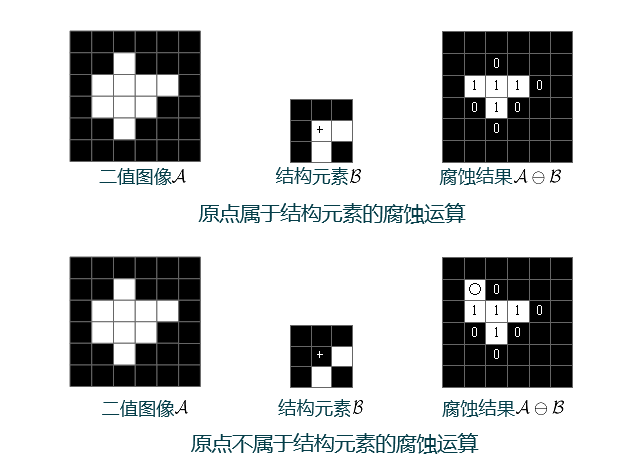
① 对图像目标区域的膨胀运算相当于对其背景区域的腐蚀运算,反之亦然。
(3)开运算:先腐蚀后膨胀的运算。
① 开运算能消除小尺寸目标和细小的突出部分,断开细小的桥接部分而分离目标区域、平滑较大目标边界。
(4)闭运算:先膨胀后腐蚀的运算。
① 闭运算能填补目标区域内部小尺寸孔洞和细窄的缺口、桥接狭窄的断裂部分而使目标区域连通、平滑较大目标边界。
8.3 二值图像形态学实用算法
(1)边界提取、轮廓提取s
9.图像分割
9.1 图像分割基础(理解)
(1)图像分割:将图像划分为若干有意义的区域或部分,或者从图像中提取感兴趣目标的图像处理技术。
(2)连续性和不连续性
① 连续性:根据制定准则将图像分割为相似区域,如阈值处理、区域生长。
② 不连续性: 基于特性(如灰度)的不连续变化分割图像,如边缘检测。
(3)图像抠图:从一幅图中尽可能完整地提取出感兴趣的目标。(图像分割只是分离出图像中的前景(目标))
9.2 基于边界的分割(非连续性分割)
(边缘定义 理解、RPS三个算子 掌握、LoG DoG Canny 理解、算子间比较掌握、边界跟踪 Hough不考)
(1)边缘:图像中灰度发生突变或不连续的微小区域,即两个具有相对不同灰度值特性的区域分界线。
① 有方向和幅度两个属性,沿边缘方向像素灰度值变化平缓/不发生变化,垂直边缘方向像素灰度值变化剧烈。
(2)边缘检测算法:分为一阶差分和二阶差分两类。
② 二阶差分算子:通过寻找图像二阶差分过零点来定位边缘。最常用为拉普拉斯过零点。
(斜坡边缘中使用一阶检测图像中边缘的存在,使用二阶来确定准确位置)
③ 一阶和二阶差分都表现出了对噪声的敏感性,故在使用其边缘检测时应注意噪声影响。(边缘检测前先去噪)
(3)基于边缘检测的图像分割:先确定图像边缘像素,然后将它们连接起来构成边界。
(4)一阶差分算子:通过寻找最大值检测边缘,将边缘定位在一阶差分最大方向。
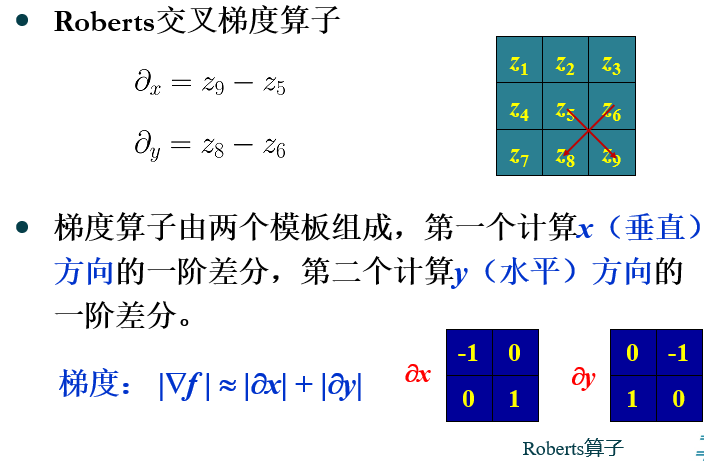
① 梯度算子:常用差分近似偏导数,在像素 ( x, y ) 处定义为

前者表示 x 方向上的一阶差分,后者表示 y 方向的一阶差分。
② 梯度幅度:

③ 梯度方向:梯度增加最快的方向:

④ 灰度梯度: 指向边缘的垂直方向。
(5)一阶差分算子分类:
① Roberts 交叉梯度算子:
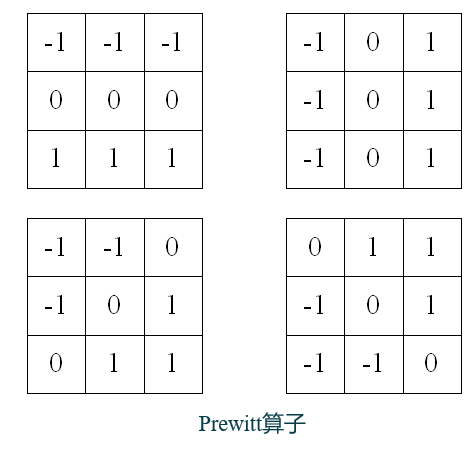
② Prewitt 梯度算子:四个方向——水平、垂直、对角、反对角
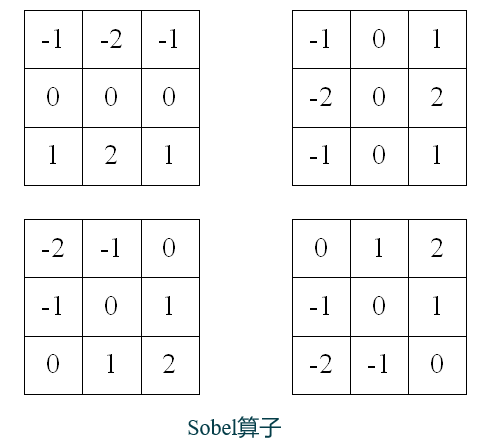
③ Sobel梯度算子:四个方向——水平、垂直、对角、反对角
(6)二阶差分算子:边缘处的 零交叉 / 过零点 可确定边缘位置;二阶差分符号可以确定边缘像素在亮处还是暗处。
(7)拉普拉斯算子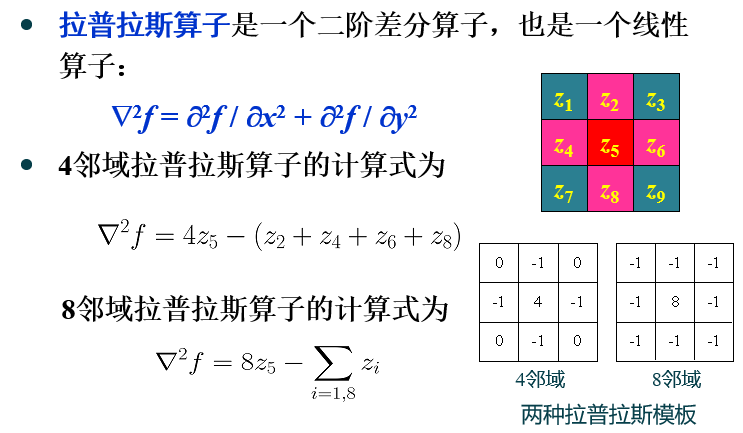
① 缺点:对噪声敏感;会产生双边效果;不能检测边方向。
② 高斯拉普拉斯算子(LoG):拉普拉斯算子的常用变形形式。
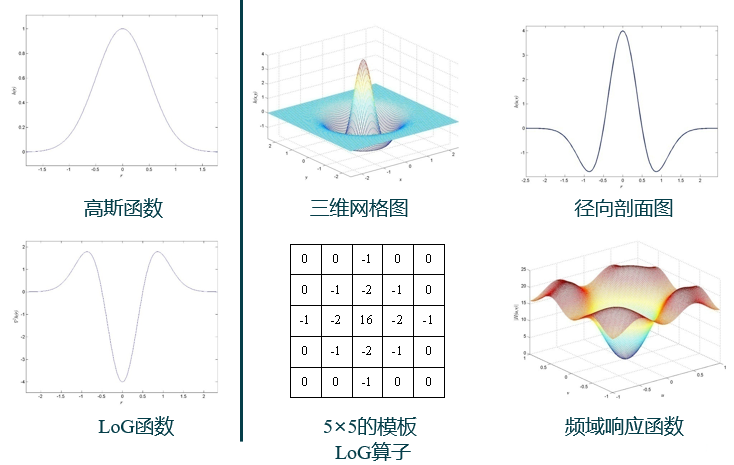
特征:一个正的中心项周围被相邻负值区域环绕,并被一个零值外部区域包围;系统总和为0;有时被称作墨西哥草帽函数。
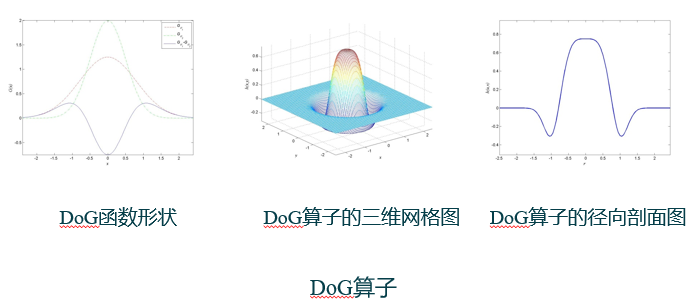
(8)高斯差分算子(DoG):两个高斯函数之差的形式。
(9)Canny 算子:
① 步骤:高斯图像平滑—基于梯度的边缘检测—梯度幅度的非极大值抑制—双阈值法的边缘检测和连接
(10)算子比较
① 好的边缘检测算子的特点:避免虚假边缘、能检测出真正的边缘、响应次数低(最好只有一个)。
② Roberts算子:边缘定位精度较高,但抑制噪声能力较差,适用于陡峭边缘且信噪比高的图像。
③ Sobel与Prewitt算子:等效于首先对图像进行加权平滑处理,然后再计算差分。对噪声有一定的抑制能力,但检测出的边缘具有一定宽度,且不能形成闭合、连通的轮廓。
⑤ 拉普拉斯算子:对噪声非常敏感,不适合直接用于边缘检测。
LoG算子:克服了拉普拉斯算子抗噪能力差的弱点,并能产生闭合、连通的轮廓,但在抑制噪声的同时也模糊了边缘,从而造成弱边缘漏检。
⑥ Canny算子: 可以形成闭合、连通且单像素宽度的边缘,但也会产生类似意大利式细面条盘子效应的虚假边缘。
9.3基于阈值的图像分割(相似性分割)
(Otsu 迭代 掌握,其余理解)
(1)基于阈值的图像分割:设定不同阈值将图像中像素分为 两 / 多 类,计算简单且容易实现,阈值的选取决定了阈值分割的效果。
① 特点:目标与背景在灰度上对比度较强且较单一;可以得到封闭且连通区域的边界。
② 分类:全局阈值法(对整幅图像求单一或多个最优分割阈值)和局部阈值法(将整幅图像分为若干区域分别求最优分割阈值)。
(2)双峰模式:当一幅图像由亮目标区域和暗背景区域(或反之)组成时,灰度直方图呈现双峰模式。
(3)P参数法:根据目标区域在整幅图像中所占的比例来设定阈值,进行二值化处理。
(4)Otsu阈值法(自动阈值法):据像素灰度特征将图像中像素分为前景和背景两类,其类间方差最大时的阈值为最优阈值。
(5)迭代阈值法:基本思想是属于同一类别的像素灰度值一致性较大,使用均值和方差作为均匀性度量的数字指标。
(6)基于梯度的直方图阈值法:利用像素梯度选择阈值,区域内部梯度较小,边界像素梯度较大。梯度小赋予大权重,梯度大赋予小权重。
① 灰度-梯度二维直方图阈值法:建立二维直方图,横轴为灰度级,纵轴为梯度。
(7)多阈值法:
① 单阈值法灰度直方图呈现双峰时,选谷底作为阈值分割结果较好。
② 多阈值法在图像分割中设定多个阈值来实现分割。
③ 双阈值法探索目标像素的空间相似性和连续性,避免单域值法中阈值过高/低而错分。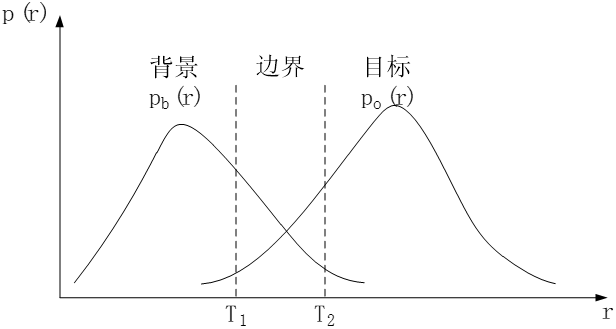
(8)局部阈值法(动态阈值处理/自适应阈值法):使用一组与像素坐标相关阈值,为图像中各个像素计算不同的分割阈值。(Niblack算法)
9.4基于区域的图像分割(相似性分割)(掌握+理解)
(1)区域生长法:在待分割区域确定一个/多个种子像素、据某种相似性准则,由内向外合并拓展区域、将拓展区域内所有像素作为新的种子像素。进行到不再有新结点加入时终止生长。
① 使用栈实现。4 领域顺序 “左 上 右 下 ”; 8 邻域顺序 “ 左 左上 上 右上 右 右下 下 左下”。
② 4连通区域生长法问题:不能通过狭窄区域,有时不能填满区域;
8连通区域生长法问题:会填出区域的边界。
(2)区域标记:将一幅图的同一个连通分量标记为同一符号。即连通分量标记。标记后输出为区域标记矩阵。
(3)区域分裂合并: 按某种一致性准则分裂合并区域。(不满足分裂满足合并)通常利用四叉树数据结构进行描述。

