
Chromium 消息循环和线程池详解
Chromium 中的多线程机制由 base 库提供,要理解 Chromium 中的多线程机制,首先要理解的概念就是 base::MessageLoop 和 base::TaskScheduler ,它们两个是 Chromium 多线程的基础
1. MessageLoop详解
base::MessageLoop 代表消息循环,它不会主动创建新的线程,默认情况下它使用当前线程(你也可以手动把它 Bind 到指定的线程上),它只负责消息(任务)循环,它提供了 task_runner() 方法用于获取 TaskRunner 对象,你需要使用 TaskRunner::PostTask*() 方法来向该消息循环分发消息,默认情况下这些消息(任务)会在当前线程运行。因此,你可以在当前线程中创建 MessageLoop 并且在当前线程中向它 Post 消息,并且这些消息(任务)会在当前线程执行。
每一个通过base::Thread创建出来的线程都拥有一个 MessageLoop,但是主线程(main 函数所在的线程)不是通过base::Thread来创建的,它又需要处理消息循环,因此需要手动给主线程创建MessageLoop,这个过程一般在程序的入口处进行。
你可以使用 base::MessageLoopCurrent::Get() 静态方法获取当前线程的MessageLoop对象,从而使用 base::MessageLoopCurrent::Get()->task_runner()→PostTask*() 方法来创建任务。
一旦你创建了一个 MessageLoop 对象,它会自动 Bind 到当前线程(通过线程依赖的 ThreadLocal 机制来实现)。

比较常规的使用方式可以参考下面:
1 #include "base/logging.h" 2 #include "base/message_loop/message_loop.h" 3 #include "base/message_loop/message_loop_current.h" 4 #include "base/task/post_task.h" 5 #include "base/task/single_thread_task_executor.h" 6 #include "base/task/thread_pool/thread_pool_impl.h" 7 #include "base/task/thread_pool/thread_pool_instance.h" 8 #include "base/threading/thread_task_runner_handle.h" 9 #include "base/timer/timer.h" 10 11 void Hello() { 12 LOG(INFO) << "hello,demo!"; 13 } 14 15 int main(int argc, char** argv) { 16 // 创建消息循环 17 base::MessageLoop message_loop; 18 // 也可以使用下面的方法。它们的区别仅在于 MessageLoop 对外暴露了更多的内部接口。 19 // 在当前线程创建一个可执行 task 的环境,同样需要使用 RunLoop 启动 20 // base::SingleThreadTaskExecutor main_task_executer; 21 22 base::RunLoop run_loop; 23 24 // 使用 message_loop 对象直接创建任务 25 message_loop.task_runner()->PostTask(FROM_HERE, base::BindOnce(&Hello)); 26 // 获取当前线程的 task runner 27 base::ThreadTaskRunnerHandle::Get()->PostTask(FROM_HERE, 28 base::BindOnce(&Hello)); 29 30 // 启动消息循环,即使没有任务也会阻塞程序运行。当前进程中只有一个线程。 31 run_loop.Run(); 32 33 return 0; 34 }
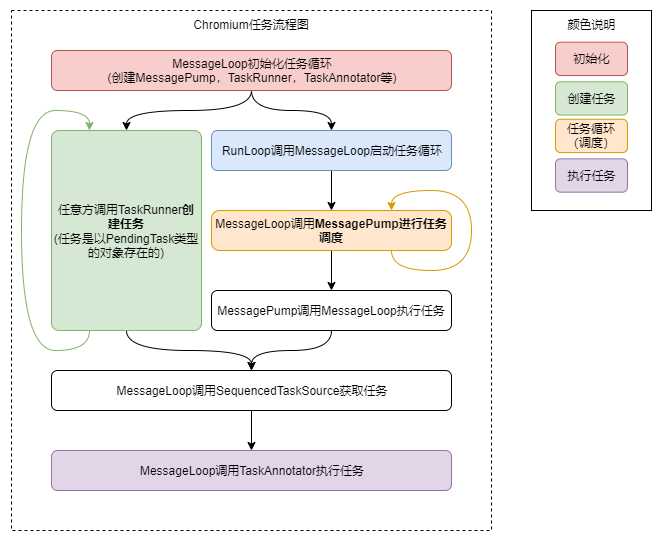
2. MessageLoop 的运行流程
3. MessageLoop 的类图
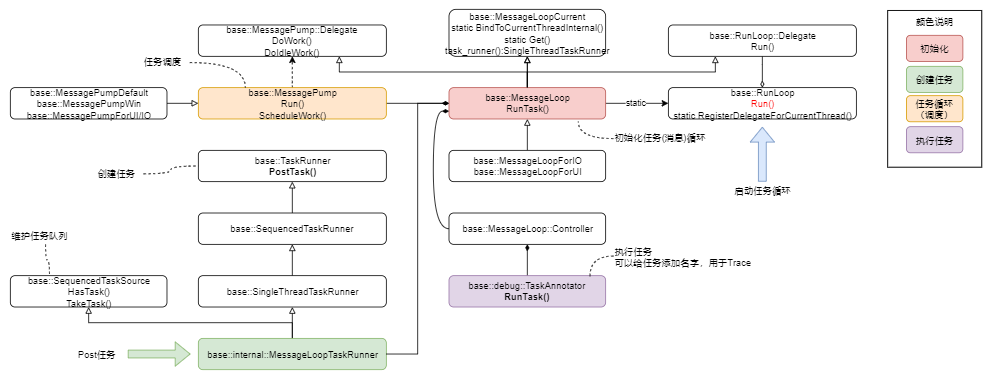
类图中已经介绍了主要类的功能,这里不再赘述,简单总接一下就是:MessageLoop 创建消息/任务循环,并且绑定到当前线程,RunLoop 启动消息循环,调用者通过 TaskRunner 来创建任务。
4. TaskScheduler详解
base::TaskScheduler 直译为任务调度器,也可以叫做线程池,你需要使用它的 static 类型的 Create*() 相关方法来构造它,使用 Start() 方法来启动它,或者通过 CreateAndStartWithDefaultParams() 方法来同时创建并启动线程池。默认情况下他会创建 3 个线程,1 个 Service 线程,2 个 Worker 线程。Service 线程只用来调度延时任务,Worker 线程用来执行任务。Service 线程继承自 base::Thread ,因此它内部也包含了 MessageLoop(每一个 base::Thread 类创建出来的线程都有一个 MessageLoop)。Worker 线程是 TaskScheduler 直接使用 PlatformThread::Create*() 方法创建出来的,因此它不包含 MessageLoop。你可以使用 base::PostTask*() 全局方法来向线程池 Post 任务。
TaskScheduler一般用法如下:
1 #include <base/logging.h> 2 #include <base/message_loop/message_loop.h> 3 #include <base/task/post_task.h> 4 #include <base/task/task_scheduler/task_scheduler.h> 5 6 void Hello() 7 { 8 LOG(INFO)<<"hello,demo!"; 9 } 10 11 int main(int argc,char** argv) 12 { 13 // 初始化线程池,会创建新的线程,在新的线程中会创建消息循环 MessageLoop 14 base::TaskScheduler::CreateAndStartWithDefaultParams("Demo"); 15 16 // 通过以下方法创建任务 17 base::PostTask(FROM_HERE, base::BindOnce(&Hello)); 18 // 或者通过创建新的TaskRunner来创建任务,TaskRunner可以控制任务执行的顺序以及是否在同一个线程中运行 19 scoped_refptr<base::TaskRunner> task_runner_ = 20 base::CreateTaskRunnerWithTraits({base::TaskPriority::USER_VISIBLE}); 21 task_runner_->PostTask(FROM_HERE,base::BindOnce(&Hello)); 22 23 // 不能使用以下方法创建任务,会导致程序崩溃,因为当前线程没有创建消息循环 24 //base::MessageLoopCurrent::Get()->task_runner()->PostTask(FROM_HERE, base::BindOnce(&Hello)); 25 26 // 由于线程池默认不会阻塞程序运行,因此这里为了看到结果使用getchar()阻塞主线程。当前进程中共有4个线程,1个主线程,1个线程池Service线程,2个Worker线程。 27 getchar(); 28 29 return 0; 30 }
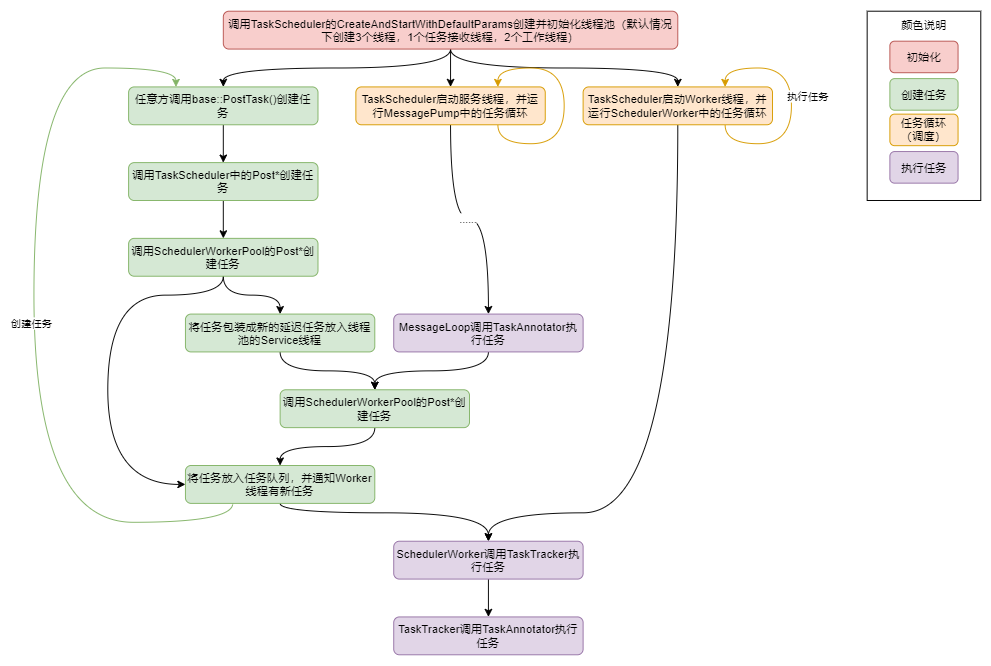
5. TaskScheduler 的运行流程
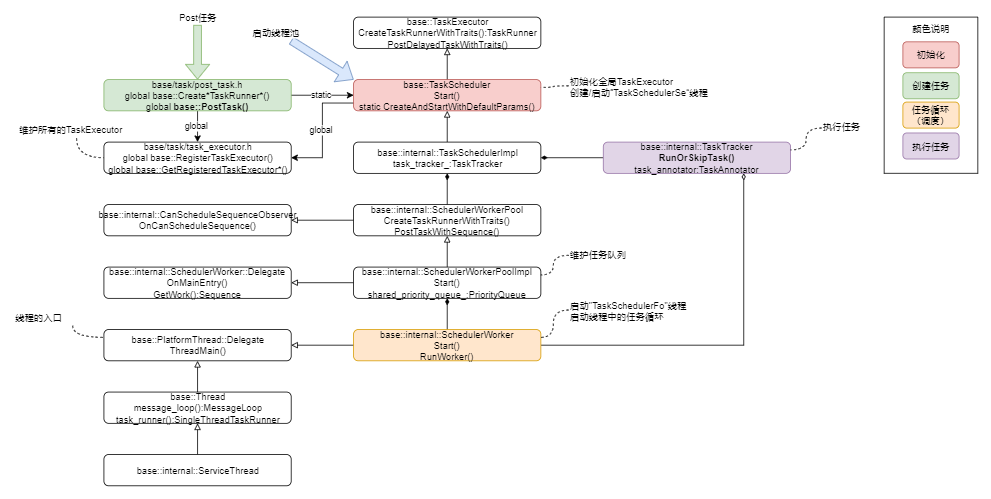
6. TaskScheduler 的类图
7. 总结
- 每一个
base::Thread线程都拥有一个MessageLoop用来进行任务调度; - 主线程如果需要消息循环,需要自行创建
MessageLoop; - 由于
MessageLoop中维护有TaskRunner,因此你可以通过获取该线程的TaskRunner来给该线程 Post 任务; - 线程池使用更底层的
PlatformThread::Create*()来直接创建线程,从而避免每个线程都有 MessageLoop; - 线程池中的任务是通过
base::PostTask*()创建的; - 线程池使用名为
TaskSchedulerSe的线程来调度需要延时的任务,不需要延迟的任务会直接放入线程池的任务任务队列; - 通过
TaskRunner的PostTask*()方法会将任务Post到TaskRunner所在的MessageLoop; - 通过
base::PostTask*()全局方法默认会将任务Post到线程池中;
8. 参考文献


